基于时间补偿的三电平逆变器中点电位平衡控制
2016-10-15毕长煜
毕长煜
(沈阳工业大学电气工程学院,沈阳 110870)
基于时间补偿的三电平逆变器中点电位平衡控制
毕长煜
(沈阳工业大学电气工程学院,沈阳 110870)
由于中点箝位式三电平逆变器(NPC)固有的电气结构,中点电位平衡问题一直是NPC逆变器的固有问题,本文在深入探讨逆变器中点不平衡的根本原因的基础上。提出了一种基于时间补偿的中点电位控制方法,其区别于传统PI的控制策略,该方法就是对中点电位差进行分类,以实现在不同电位下,对小矢量开关时间实现不同参数补偿,以到达中点电位的精确控制。通过Matlab/Simulink仿真证明了基于时间补偿的中点电位调制方法的有效性。
中点箝位式;中点电位平衡;时间补偿;直流母线电压
多电平逆变器目前广泛地应用于各种大功率工业设备,并且逐渐替代了两电平逆变器,其中二极管箝位式三电平逆变器因其自身优势已经广泛应用,以其为例,其输出相比于两电平逆变器具有更低的电压变化率,同时从整个逆变系统分析,它降低了系统的谐波畸变率(THD)。保证了系统的安全性[1]。图1给出了经典的NPC逆变器拓扑结构图,现在已广泛地应用于可再生能源系统和中压大功率设备中[2]。虽然NPC逆变器具有以上优点,但由于其拓扑结构的限制,中点电位不平衡的问题一直存在,其直流侧上的母线电容降压并非理想的二分之一[3],因此如何控制逆变器中点电压一直是三电平逆变器的研究热点。

图1 三电平中点箝位式逆变器拓扑结构
1 中点电位控制策略比较
通过研究发现造成中点电压偏差通常有以下几个原因:一是算法中本身性质的因素,二是在硬件上由于制造技术的误差造成电容自身充放电的不平衡,同时开关器件特性的不一致也造成直流母线中点电位的不平衡[4],因此想要根本解决该问题非常困难。目前解决电位问题主要从两个方面入手:①仍从硬件方面入手,修改电路的拓扑结构或增加额外的硬件电路,但需要增加相应的电子器件,虽然有所改进,但高成本问题依然很难解决,所以一般情况下不予采用[5];②从算法角度入手,分别是正弦脉宽调制(SPWM)和空间矢量调制(SVPWM)。当采用SPWM时,代表性策略是在给定的参考电压中加入了零序电压的控制方法,但该方法需知道电机电流的功率因数角,在动态过程中很难得到,同时该方案颇为复杂[6-7]。从SVPWM算法入手,具有代表性的是提出了一种预测控制算法,它需要综合考虑一个小区间内各个开关顺序,虽可以实现,但过于复杂的算法运算和对开关管的巨大损耗,使其在实际应用中不易实现[8]。
本文是在传统的中点控制方法上提出了一种基于时间补偿的中点电位控制策略,即通过对中点电位差值的划分,确立在不同电位差时采用不同时间补偿参数来分段补偿,以达到的一种精确地中点电位控制,该方法无需复杂的算法要求及大量的开关管损耗,具有很强的实用性,并且利于用计算机数字方法实现。最后通过仿真验证该方法的有效性。
2 基于时间补偿的中点平衡控制
2.1中点电位分析
通过SVPWM算法可知,长矢量,中矢量,小矢量及零矢量对中点电位具有不同的影响,其中小矢量又被分为N型小矢量和P型小矢量,其中N型开关顺序减小中点电位,P型序列则增加中点电位。因此,传统中点平衡控制策略是是通过等量地改变小矢量的作用时间来控制电位平衡。表1给出了N、P两种小矢量开关组合。

表1 小矢量开关状态
2.2小矢量补偿策略
传统序列为7段式序列,为做到PWM脉冲的对称情况,N、P型各自作用1/2的开关时间,具体的空间矢量图如图2所示,当参考矢量在第一大扇区第一小区时,7段式脉冲波形如图3(a)可知。
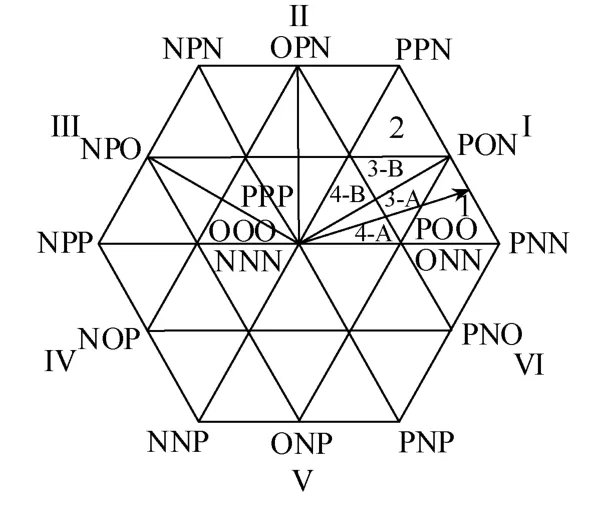
图2 三电平逆变器空间矢量图
通过分析中点电压可知,当电压值反向增大时,此时需增大P型小矢量作用时间,增添负偏移时间,情况如图3(b)所示。反之,当中点电压大于零时,需要增大N型小矢量作用时间,此时,添加正偏移时间,具体如图3(c)所示。因此,正确的时间补偿参数Ttc的添加会影响中点电压的平衡。

图3 脉冲时间
2.3中点电压控制策略
本文通过对中点电压变化范围进一步的精确划分,来定义出更为精确地中点电压范围,设直流母线电压处电容压差为Vd,上电容的电压为Vdc1,下电容的电压为Vdc2,标准情况下的电压定义为Vdnor,最大电位压差为Vdmax,最小电位压差为Vdmin。
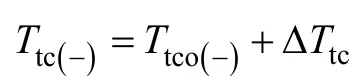
定义时间补偿参数Ttc,如果Ttc>0,则表示为Ttc(+),反之则表示为 Ttc(−)。经过优化后的开关时间如式(1)所示,同时还要判断 Vd的正负情况,则每次判断后的补偿时间如式(2)所示。

在这里,Ttco为先前的时间补偿值,ΔTtc为需要补偿的参数变化量。
2.4最大时间补偿参数设定
由于时间补偿参数受负载电流,直流母排及中点电位等变量所致,因此,时间补偿参数是不断变化的。当|Vd||Vdmax|时,此刻需定义一个最大补偿参数,由调制因数可计算出最大补偿值,即
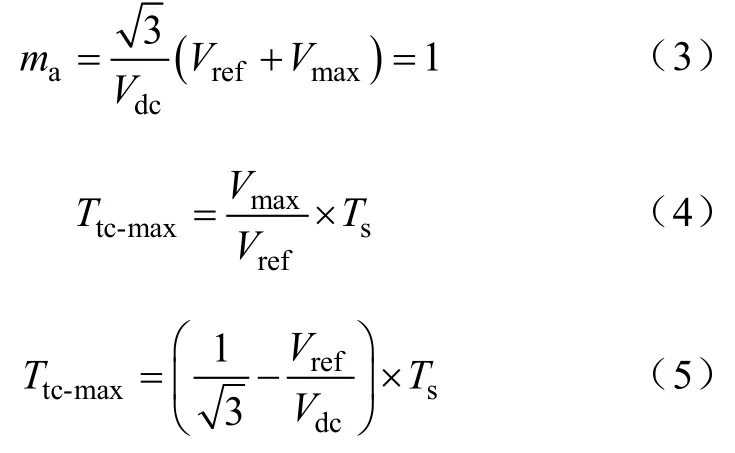
式中,Vref为参考电压向量的模;Ttc-max为最大时间补偿参数;Ts为采样时间。
如果|Vdmin|<|Vd|<|Vdmax|,则Ttc=Tclock;
如果|Vdnor|<|Vd|<|Vdmin|,则Ttc=Tclock;
如果|Vd|<|Vdnor|,那么Ttc=Ttco,ΔTtc=0。
在这里α∈(10~30),β∈(1~3)。Tclock外部时钟。当中点电位偏差较大时通过α 来改变小矢量导通时间,以快速逼近标准状态。当电位偏差较小时通过β 来修正矢量开关,以降低误差并期望达到所允许的中点电位变化幅度之内。若β 值过大,则无法准确地进行中点电位微调,反之如果α 值过小,那么在快速逼近时需花费较长的时间而不利于中点平衡快速调制,因此在定义时间倍数α,β 时需要综合考虑其快速性和准确性。
2.5时间补偿策略
由NPC母排结构可知,由于上下电容的存在,因此需分两种情况分别讨论。
当 Vdc1>Vdc2时,设时间补偿参数为 Ttc(−),具体情况如下所示:
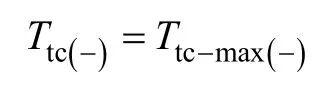
1)|Vd||Vdmax|:此时定义Ttc(−)为最大负补偿
2)Vd0 VdoVd:Vdo为前一时刻采样的中点压差。那么补偿参数Ttc(−)如下定义。

3)Vd0 VdoVd:此刻由于中点电位为负值,因此新的补偿参数需在原有的基础上进行相加。
4)Vd0 VdoVd:由于此时Vd大于Vdo,所以应该进行粗调,补偿较大的时间参数。
5)|Vd||Vdnor|:此时Vd在所定义的标准范围之内,中点电位平衡,无需进行补偿,小矢量作用时间保持原有计算值,Ttc(−)保持不变。
当Vdc1Vdc2时,下电容电压值大于上电容电压值时,此时在原时间基础上添加正补偿参数Ttc(+)。
1)|Vd||Vdmax|:此时Ttc(+)为最大正补偿

2)Vd0 VdoVd:此时在前开关时间上添加正补偿参数来达到精确控制,则Ttc(+)定义为

3)Vd0 VdoVd:此刻由于中点电位大于零,因此,新时间补偿参数该在原有的基础上进行相减才能达到精确控制。
4)Vd0 VdoVd:此时由于Vdo大于Vd,所以应该经行粗调,补偿较大的时间变量。

5)|Vd||Vdnor|:此时中点电位差在标准电位范围内,中点电位平衡,那么时间补偿参数为 0。开通时间保持不变。
除此之外,还需注意采样周期的问题,如果控制周期过短,那么难以检测因参数添加所引起的中点电压的变化,反之若采样周期过长那么需要花费大量的时间不断控制,因为在这期间中点电位差时刻变化,芯片指令出现延迟,无法有效的控制电位。
因此,采样时间的合理判定也应该考虑在内。
3 仿真分析
为了验证中点控制算法的正确性,在 Matlab/ Simulink中搭建三电平逆变器仿真模型。仿真参数如下,直流母线电压1140V。负载电阻R为10Ω,负载电感L为10mH,直流侧电容均为1000μF,开关频率15kHz,具体控制参数见表2。
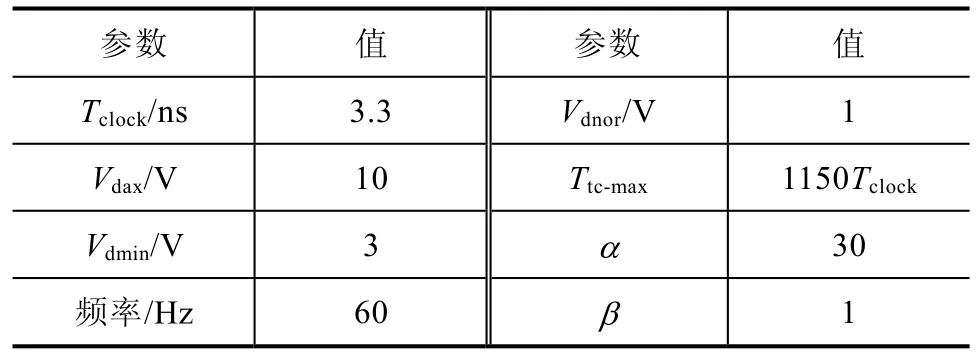
表2 仿真参数
当中点电位不平衡时输出波形图如图4所示。
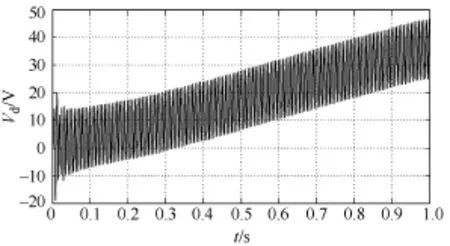
图4 无中点控制策略的中点电位
此时可以看到在没有加入中点控制器时中点电压压差越来越大到最后会使电容损坏,造成逆变器不可逆转的损坏。因此中点电位必须加以控制。通过三电平逆变器可知,逆变器所能承受的中点电压范围为直流母线电压值的5%以内,本文采用直流母线为1140V的中高压条件,则允许的电压范围波动为+57~−57V,通过此条件判断改进后中点控制策略的可行性。图5采用的是传统PI控制策略,在传统中点控制方案下,电压的偏移量得到了有效控制,中点电位差范围限制在+15~−15V,此时的中点电压在允许范围之内。已比较适用于工业生产,但还可以进一步的改进,来优化中点电位差。加入时间补偿控制后的中点电位如图 6所示。通过比较图 5和图6可以看到,经过时间补偿后的中点压差得到了一个有效地缩小,正负变化范围缩小至−3~+3V,达到了时间补偿参数的效果,很好地抑制中点电位的变化。
图7给出了加入中点控制算法后逆变器输出的线电压波形,可看到逆变器三相负载输出波形良好,可以代替传统控制中点电位控制策略。
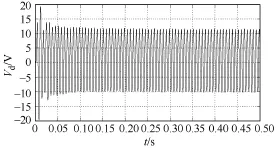
图5 采用传统PI控制的中点电压波形
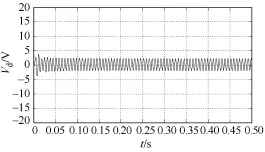
图6 基于时间补偿策略的中点电压波形
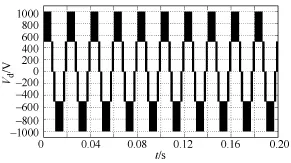
图7 负载线电压
利用powergui模块中的快速傅里叶变换(FFT)得到的电压波形谐波,来验证THD是否到达要求。从图8和图9可以看到在50Hz频率下的线电压和
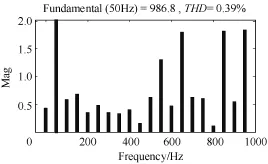
图8 线电压谐波波谱
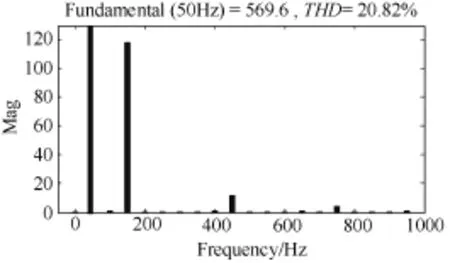
图9 相电压谐波波谱
相电压谐波频率分别是0.39%和20.82%,均小于传统情况下的 69.8%和 41.0%,改善了逆变器输出波形,减少了总谐波含量,保证了回馈电网的安全性。
4 结论
本文针对传统的二极管箝位式三电平逆变器提出一种基于时间补偿的中点控制策略。通过分析传统的中点电位控制策略,在其开关开通时间上采用补偿时间参数来优化传统控制策略。并且,无需复杂的计算量,既减轻了计算机CPU的负担同时又避免了因额外的硬件电路而增加成本,而且易于实现,在实际的工程运用中具有一定的价值。最后通过仿真分析可以验证该方法的有效性。
[1] 刘玲玲, 王卫安, 陈艺峰. 三电平逆变器中点电位控制算法研究[J]. 大功率变流技术, 2014(3): 26-31.
[2] B IU. 大功率变频器及交流传动[M]. 北京: 机械工业出版社, 2012.
[3] 夏鲲, 丁晓波, 李肖迪, 等. 交错 DC/DC三电平逆变器中点电位控制方法仿真研究[J]. 系统仿真学报, 2014, 26(8): 1741-1746.
[4] 黄华. 三电平逆变器中点电位平衡的研究概述[J].电气开关, 2008, 46(4): 8-11.
[5] 张珍珍, 许春雨. 三电平 NPC型逆变器中点电位稳压器的设计[J]. 电气传动, 2014(12): 26-31.
[6] 王新宇, 何英杰, 刘进军. 注入零序分量 SPWM 调制三电平逆变器直流侧中点电压平衡控制机理[J].电工技术学报, 2011, 26(5): 70-77.
[7] 宋强, 刘文华, 严干贵, 等. 基于零序电压注入的三电平NPC逆变器中点电位平衡控制方法[J]. 中国电机工程学报, 2004, 24(5): 57-62.
[8] 赵霞, 耿乙文, 梁改革, 等. 基于预测控制算法的三电平中点电压平衡控制[J]. 电气传动, 2013, 43(4): 50-52, 56.
Neutral-Point Voltage Balancing Control for Three-Level Inverter based on a Time Compensation
Bi Changyu
(School of Electrical Engineering, Shenyang University of Technology, Shenyang 110870)
Because of neutral-point-clamped (NPC) three-level inverter inherent electrical structure, neutral-point Voltage Balancing issue has been an inherent problems in NPC inverter. This paper discusses deeply the root causes of imbalance the neutral-point of the inverter, offering a method based on the time compensation netutral point control method and differring from the PI control. The method is to classify the neutral-point, in order to achieve at different potentials for small vector switching time parameters to achieve different compensation, reaching precise control of the neutral-point control. Matlab/Simulink simulation results show the effectiveness of the neutral-point potential modulation based on the time compensation.
NPC; neutral-point voltage balancing; time compensation; DC bus capacitors
辽宁省高等学校优秀人次支持计划资助(LR2013006)
辽宁省高等学校创新团队项目(201334068)
