基于动态引导滤波的多尺度图像融合算法
2016-10-14柳培忠汪鸿翔
洪 铭 柳培忠 汪鸿翔
基于动态引导滤波的多尺度图像融合算法
洪 铭 柳培忠 汪鸿翔
华侨大学工学院
该文基于动态引导滤波器(RGF)提出了一种新的图像多尺度表示方法,并将其应用到图像融合技术中。首先,使用RGF将输入图像用多种尺度的子图表示;然后,基于显著性检测获得输入图像的权重映射;最后使用基于递归滤波的加权融合方法得到最后的融合图像。多组图像融合实验的比较结果表明,相比于其它基于多尺度分解的融合算法,本文提出的融合算法更好地保持了输入图像的细节信息,融合图像的视觉效果更好。
RGF 显著性检测 递归滤波
1 概述
图像融合是指将相同场景下的不同图像合成一幅图,图像融合技术在计算机视觉、医学图像处理、遥感图像、特征提取等领域都有广泛应用[1]。融合后的图像通常能提供更充分的场景信息,并且更有利于人眼和机器识别[2]。
多尺度变换理论被广泛应用到各种图像融合技术中。基于多尺度变换的图像融合技术主要步骤包括:一是将输入图像分解成多种尺度的子图,二是根据给定的融合策略对分解子图进行加权融合,三是使用逆变换重构融合图像。其中图像分解过程通常使用各种金字塔技术,包括拉普拉斯金字塔(LP)[3]、低通滤波金字塔(RP)[4]和梯度金字塔(GP)[5]。除此之外,小波变换[6]和曲波变换[7]也经常用于图像融合领域。但是,由于这些多尺度变换方法通常会使用到上采样或下采样处理,从而使得融合后的图像丢失掉部分细节信息[8,9],并且在变换时也会引入噪声,使得融合图像的边缘处产生圆晕效应。
本文基于动态引导滤波(RGF)提出了一种新的图像多尺度分析方法。其中,RGF是最近提出的一种边缘保持类平滑滤波器,也是一种尺度滤波器。通过改变RGF的参数可以得到各种尺度的平滑图像和细节图像,而且这种边缘保持类分解过程不会损失图像的细节信息。同时本文基于显著性检测获得输入图像的权重映射,然后使用基于递归滤波的加权融合方法得到融合图像。
2 动态引导滤波器
Zhang等[10]提出了一种新的基于尺度测量的边缘保持类滤波器——RGF(rolling guidance filter)。相比于其它边缘保持滤波器,RGF是基于迭代实现并且有着更快收敛的属性,简单、快速并且容易理解。RGF主要包含小结构移除和边缘恢复两个过程,能自动保存图像中的大尺度结构。
首先,使用高斯滤波器移除小结构。用表示输入图像,表示输出图像,为高斯滤波器的标准差,和是像素下标。高斯滤波器如式(1)所示:


最后,将上述两个步骤结合起来,即从输入图像I开始进行动态引导滤波。如果为常量C,那么有=C,则式(2)变为,其形式与式(1)一样。
由图1可知,可以使用RGF移除图像中纹理、细节和噪声等小尺度结构,并且在移除这些结构时保存其它内容。同时由图1可知,当改变参数时,可以移除图像中各种尺度结构。图1是取不同值时RGF的滤波结果,最左边为输入图像,其它图从左到右的值依次为4、8、32;值都为0.05,迭代4次。
3 图像融合
将基于RGF的多尺度分解应用到图像融合过程中,主要包括多尺度子图获取、融合权重估计和加权融合3个过程。其中多尺度子图获取主要通过改变来移除不同的尺度结构;权重估计和加权融合使用的是一种基于递归滤波的加权融合方法,该过程先通过显著性计算分别获取各子图的权重,然后细化权重矩阵,最后加权融合各子图获得最终的融合图像。本文提出的图像融合流程如图2所示。
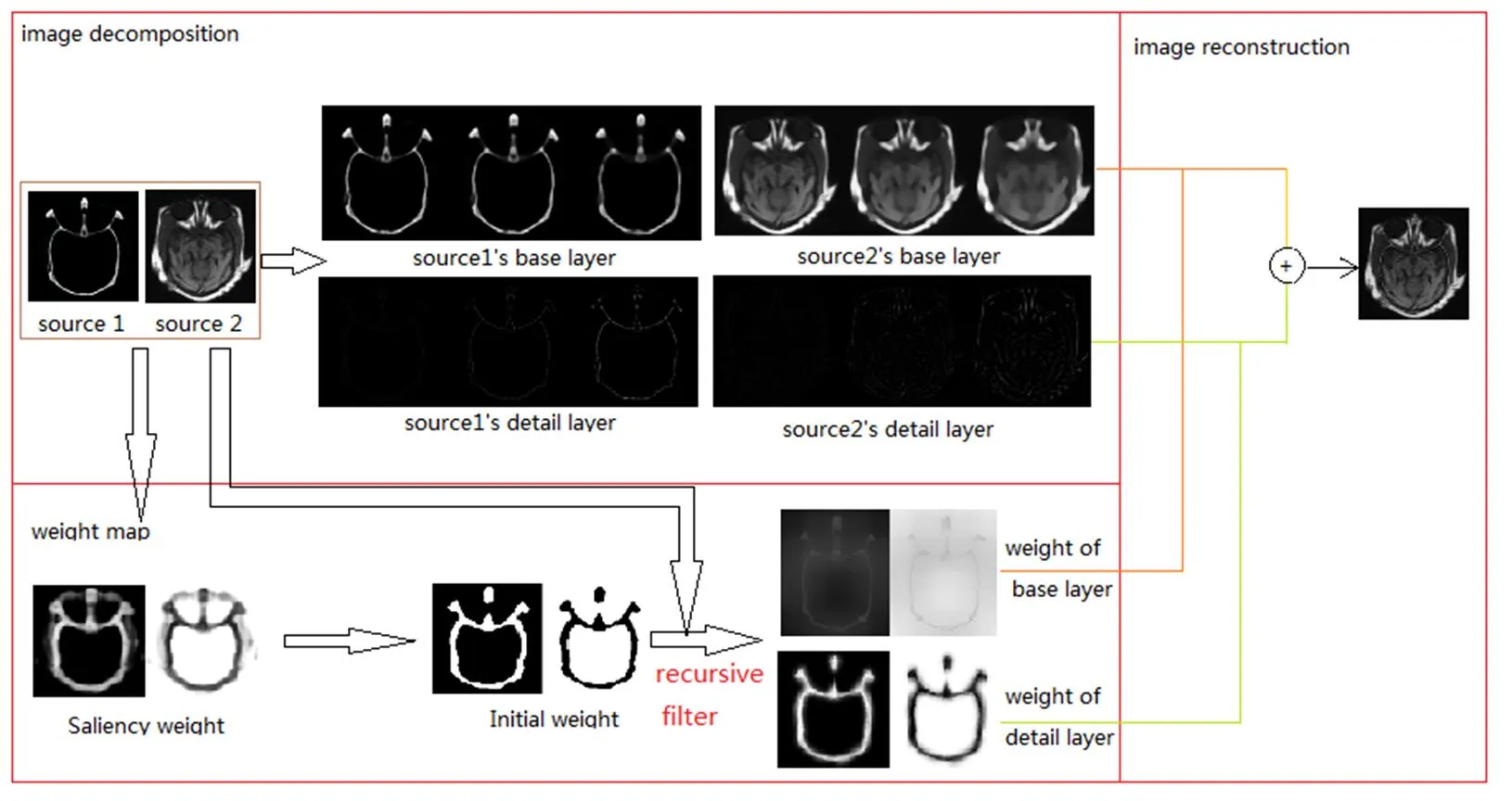
图2 图像融合流程图
3.1 获取多尺度子图

(4)
3.2 权重估计
由于人眼对于边、角和不平滑区域更加敏感,本文将文献[12]和[13]的3D采样方法应用到2D图像,得到显著性映射如下所示:

(6)

(8)
3.3 权重细化和加权融合
由图2可知,本文3.2小节中的权重估计充满了噪声和0、1权值。因此,本文采用一种基于递归滤波[14]的加权融合方法细化权重矩阵。递归滤波器是一种实时的边缘保持平滑滤波器。这里将输入图像作为参考图像,对权重映射进行递归滤波,得到基础层权重映射和细节层权重映射:

(10)


4 结果与分析
4.1 评估机制
为了客观评价图像的融合质量,本文采用归一化互信息QAB/F[11]和(MI)[13]两种评估机制来衡量算法的有效性。
MI表示融合图像从原图像获得的信息量的大小,具有对图像间重叠块大小不敏感的特征。设原图像为I1和I2,融合图像为F,则归一化互信息MI可由文献[13]中定义表示为:

其中,()、()和()分别表示A、B和F的边缘熵,而()表示A和F的互信息,且(,)=()+()-(),其中()表示A和F的联合熵。()的定义与MI(A,F)相似。
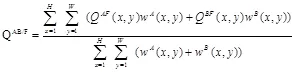
QAB/F表示融合图像对于原图像A、B的整体边缘信息保存量,其值可表示为:
4.2 参数分析
在本文的所有实验中,设置多尺度分解的层数L=5。同时,RGF滤波器的初始=3,=0.05,然后逐级增大,步长step=2。引导滤波器的两个参数和对于本文算法有着一定的影响,当对基础层进行融合时,需要大尺度的和模糊度;当对细节层进行融合时,和不易太大和太小。因此本文采用默认设置,即:=25,=15,=0.01。
4.3 与其它基于多尺度变换算法的比较
为了验证本文算法的优越性和有效性,将其与其它基于多尺度变换的算法,如拉普拉斯金字塔(LP)、低通滤波金字塔(RP)、梯度金字塔(GP)、小波变换和曲波变换进行比较。比较算法的参数与文献[8]、[9]的设置一致。具体融合结果如图3~图5所示,表1为这几种算法的MI和QAB/F值。
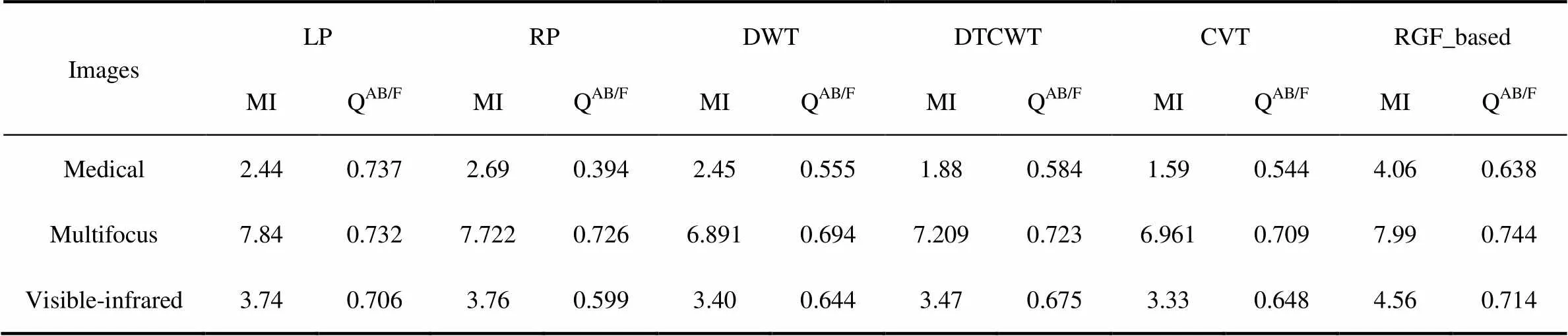
表1 本文算法(RGF_based)与其它基于多尺度变换的图像融合算法性能比较
图3是对Medical图像融合效果的比较,其中两输入图像具有互补的特征。可以看出,本文算法不仅能将两幅图中的重要信息保留下来,而且能保持比较好的对比度和清晰度。从表1也可以看出,本文算法取得了较高的MI值,表明本文算法能从原图像获得较多的信息量;同时本文算法的QAB/F值也比其他算法高,表明本文算法在融合过程中能有效保持输入图像的边界。
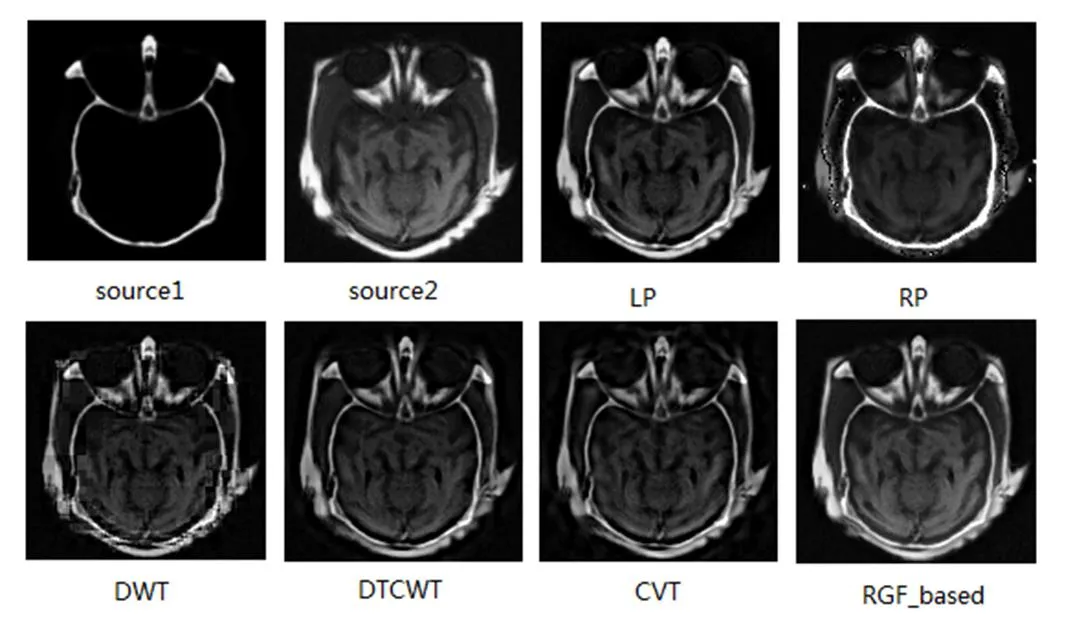
依次为输入图像1,输入图像2,LP,RP,DWT,DTCWT,CVT和本文算法的融合结果。
图4为Multifocus图像融合效果的比较,即两幅图像的聚焦不同。可以看出,两输入图像的特征和清晰度在融合图像中得到了保持,同时本文算法的对比度要稍好于其它算法。从表1的MI和QAB/F值可以看出差别,即本文算法较好地将源图像中的清晰部分保留下来了。
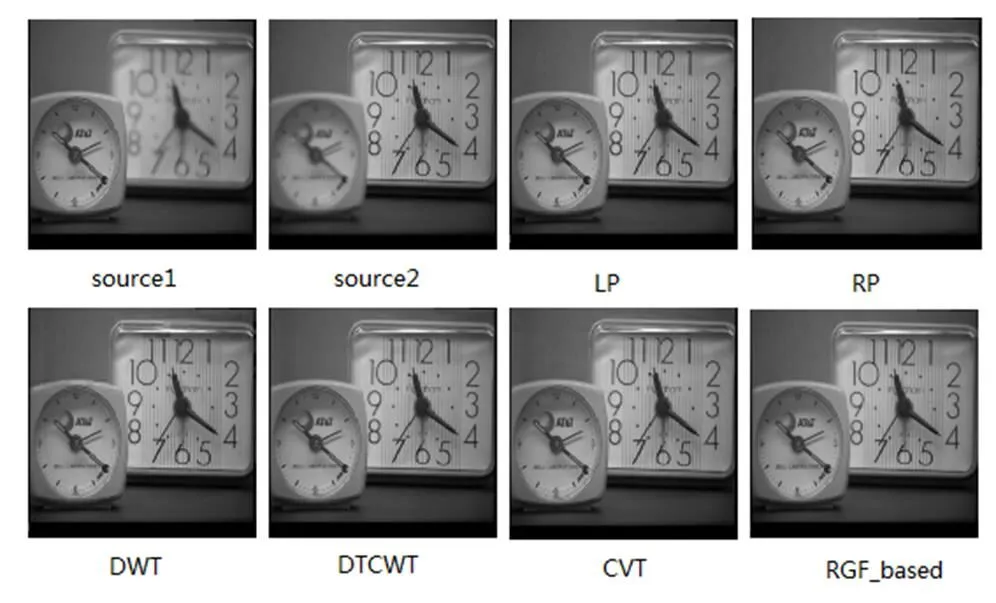
依次为输入图像1,输入图像2,LP,RP,DWT,DTCWT,CVT和本文算法的融合结果。
图5为可见光图像与红外图像的融合。可见光图像能够更好反映物体的细节,而红外图像能够有效捕捉发热目标,因而在融合图像中既有细节又有发热目标。可以看出,本文算法得到的融合图像对比度高,背景信息丰富,同时融合图像中的草丛相比于其它算法要更加清晰。从表1也可看出,本文算法的MI和QAB/F值都较高。
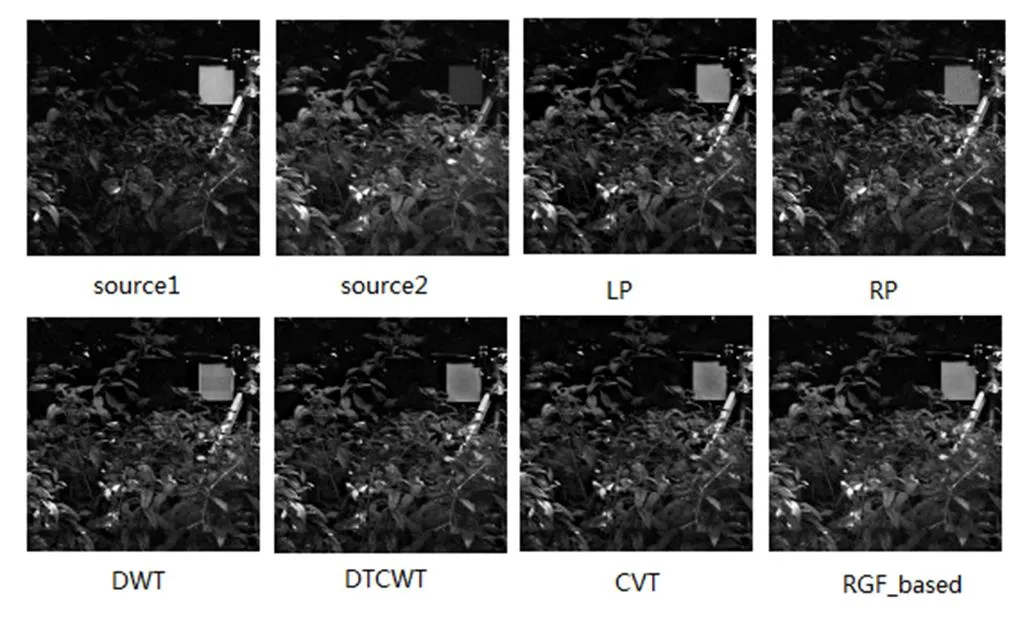
依次为输入图像1,输入图像2,LP,RP,DWT,DTCWT,CVT和本文算法的融合结果。
5 结论
本文基于RGF提出了一种新的图像多尺度表示方法,并将其应用到图像融合技术中。首先,使用RGF将输入图像用多种尺度的子图表示,再基于显著性检测获得输入图像的权重映射,最后使用基于递归滤波的加权融合方法得到最后的融合图像。多组图像融合实验的比较分析结果表明,相比于其它基于多尺度分解的融合算法,本文提出的融合算法更好地保持了输入图像的细节信息,融合图像的视觉效果更好。
参考文献:
[1] Goshtasby AA, Nikolov S.. Image fusion: Advances in the state of the art[J]. Information Fusion, 2007, 8(2): 114–118.
[2] Hall D L, Llinas J. An introduction to multisensor data fusion[J]. Proceedings of the IEEE, 1997, 85(1): 6−23.
[3] Burt P., Adelson E.. The laplacian pyramid as a compact image code[J]. IEEE Transcations on Communications, 1983, 31(4): 532–540.
[4] Petrovic V., Xydeas C.. Gradient-based multiresolution image fusion[J]. IEEE Transactions on Image Processing,2004, 13(2): 228–237.
[5] LI H., Manjunath B., Mitra S.. Multisensor image fusion using the wavelet transform[J]. Graphical Models and Image Processing, 1995, 57(3): 235–245.
[6] Lewis J., O’ Callaghan R., Nikolov S., et al.. Pixel- and region-based image fusion with complex wavelets[J]. Information Fusion, 2007, 8(2): 119–130.
[7] Nencini F., Garzelli A., Baronti S., et al.. Remote sensing image fusion using the curvelet transform[J]. Information Fusion, 2007, 8(2): 143–156.
[8] Piella G.. A general framework for multiresolution image fusion: from pixels to regions[J]. Information Fusion, 2003, 4(4): 259–280.
[9] LI S., YANG B., HU J.. Performance comparison of different multi-resolution transforms for image fusion[J]. Information Fusion, 2011, 12(2): 74–84.
[10] ZHANG Q., SHEN X., XU L., et al.. Rolling guidance fiter[C]//Computer Vision—ECCV 2014, 2014: 815–830.
[11] ZHAO Y., LIU Y., SONG R., et al.. A saliency detection based method for 3d surface simpli fication[C]//IEEE Conf. Acoustics, Speech and Signal Process., 2012, 889–892.
[12] LIU Y, LIU S, WANG Z. A general framework for image fusion based on multi-scale transform and sparse representation[J].Information Fusion, 2015, 24:147-164.
[13] LIU S., HE D., LIANG X.. An improved hybrid model for automatic salient region detection[J]. IEEE Signal Process, Lett., 2012, 19(4): 207–210.
[14] Eduardo S. L. Gastal, Manuel M. Oliveira. Domain Transform for Edge-Aware Image and Video Processing[J]. ACM Transactions on Graphics, 2011, 30(4): 193–202.
