导叶连杆偏心销偏心值的数值计算分析
2016-10-14高峰
高 峰
导叶连杆偏心销偏心值的数值计算分析
高 峰
(阿尔斯通水电设备(中国)有限公司,天津300300)
设置偏心销的目的是为了补偿导叶臂和导叶间的角度误差、导叶臂长度误差和连杆长度误差,以确保导叶处于全关位置时,通过调整偏心销偏心方位,使得连杆和控制环/导叶臂合适连接。本文应用数值分析方法,将偏心值带入数学模型,对导叶密合线角、导叶开度和接力器行程运动规律进行全数字模拟计算分析,从而找出合适的偏心值取值范围。
偏心销;偏心值;导叶开度;接力器行程
0 前言
设置偏心销的目的,是为了补偿导叶臂和导叶间的角度误差、导叶臂长度误差和连杆长度误差,以确保导叶处于全关位置时,通过调整偏心销偏心方位,使得连杆和控制环/导叶臂合适连接。
然而,设置偏心销后,偏心值的存在将使得导水机构传动机构的原有运动规律发生改变。如果偏心值选择得不合适,将对导叶开度以及接力器行程产生较大的影响。
本文应用数值分析方法,将偏心值带入数学模型,对导叶密合线角、导叶开度和接力器行程运动规律进行全数值模拟计算分析,从而找出合适的偏心值取值范围。
1 导叶密合点及密合角的求取(及导叶起始位置角的确定)
首先,按照三次样条函数对导叶型线进行数值拟合,建立翼型曲线方程。然后,建立几何关系,求解已知的尾部密合点对应的符合均布及等腰要求的对称点。通过对导叶转角的循环迭代,对此对称点与翼型坐标进行数值对比,最后求出翼型头部密合点,并确定导叶起始位置角。
(1)基本数据和基本条件:
导叶分布圆直径0(0=0/2);尾部密合点至平面中心半径01A;尾部密合点坐标值h(可为正负值);导叶数;导叶翼型背弧型线坐标:X,Y,(=1,2,3,…,)。
密合基本条件:尾部密合点与对应的密合对称点,应该在一个等腰三角形上,如图1所示。
其中:
OA=OB (1)
角形及导叶翼型
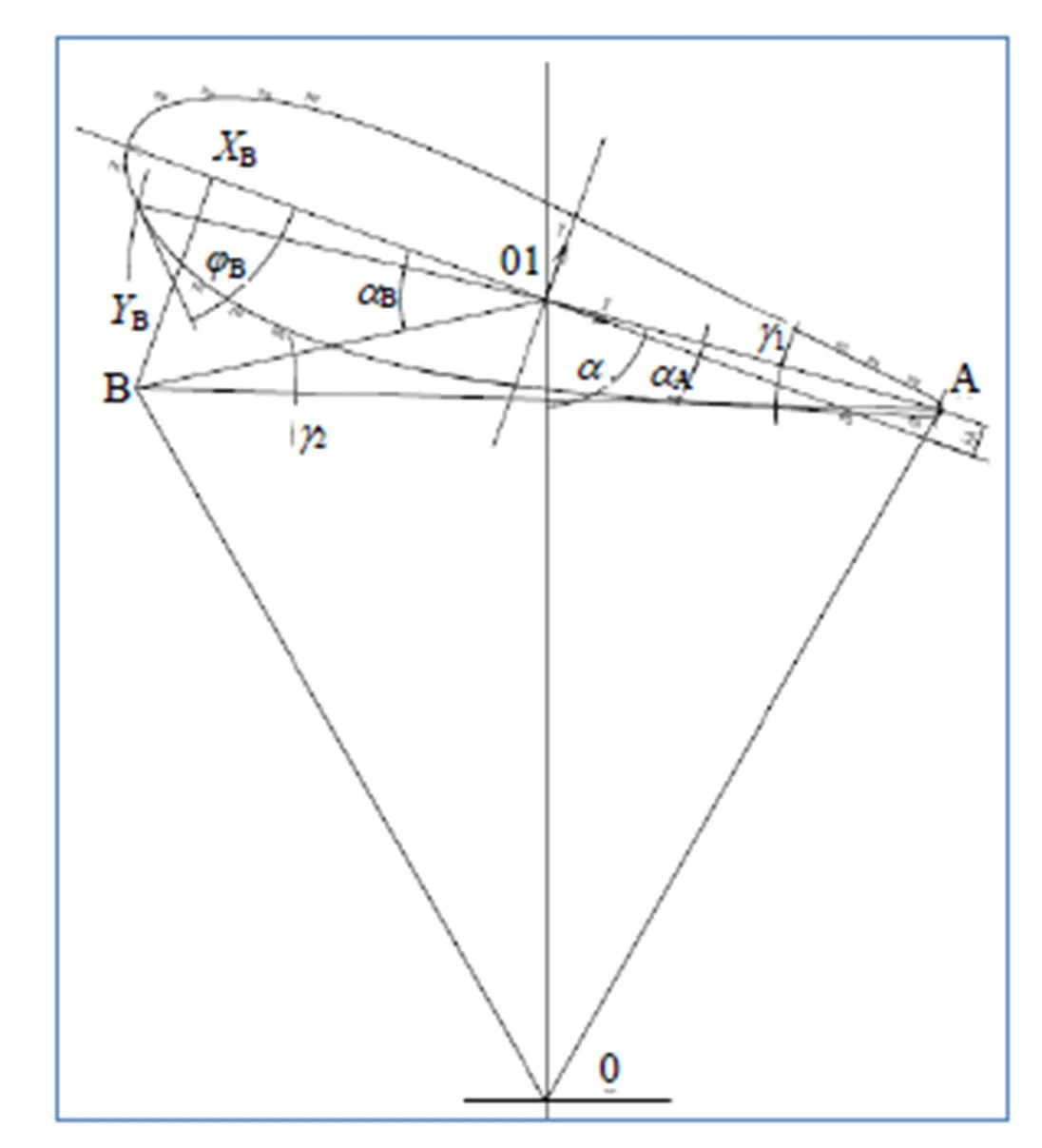
图1 尾部密合点与对应的密合对称点构成的等腰三角形及导叶翼型
(2)临介转角α求解:
求解A点和B点处于同一直线时的导叶转角的导叶转角的值。(计算过程略)。
(3)型线的拟合及密合点的求解:
由图1可知,尾部密合点的角度α:(h=X,可为正负值),设导叶计算转角:。
当<α时,求取L1B和值(计算过程略),以求取B点坐标,B点坐标值为:XB=-L1B´Cos,Y=-L1B×sin。同理,求取当>α时的B点坐标,B点坐标值为:X=-L1B×cos,Y=+L1B×sin。然后,寻找头部密合点,将=X带入翼型拟合样条函数,在[X,X +1]区间的拟合样条函数:
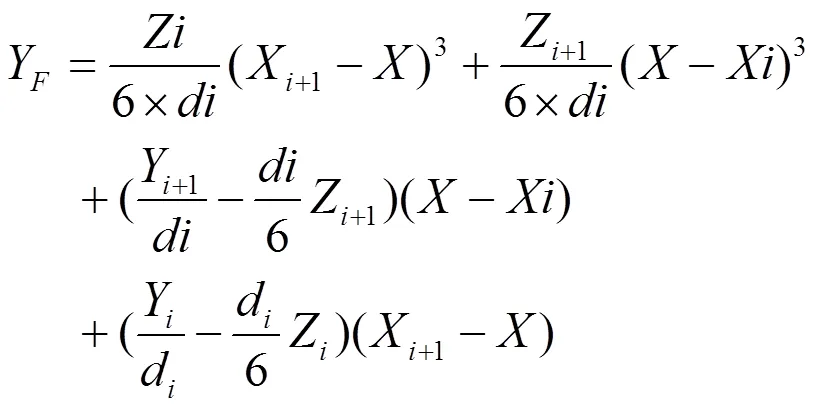
当Y=Y时,F点与B点重合,B点即为翼型的头部密合点,此时的a角即为导叶密合位置角。
B点的斜率为:
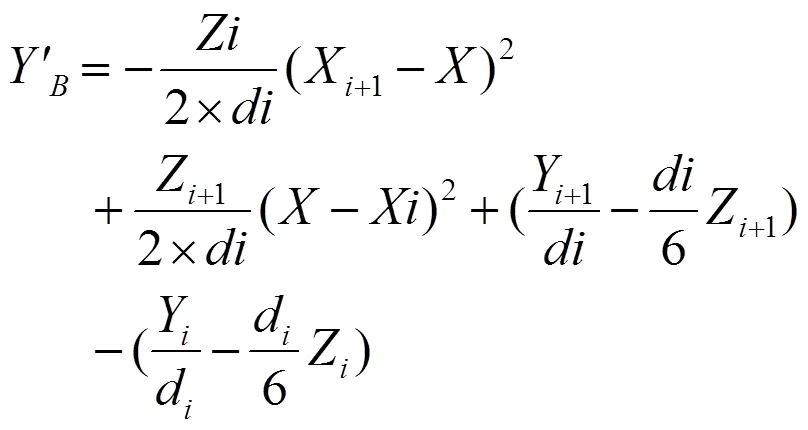
头部密合点的切角:tg=,即为头部密合角,以此可求出尾部密合角。
2 开度的求取
对求取的翼型方程和导叶起始位置角,以及相邻导叶的尾部点,考虑在导叶转过某一转角后,进行相对于机组基准O-O坐标系进行旋转及平移转换。然后在同一坐标系下,求取此尾部点至此对应翼型的最小距离,即导叶开度值。如图2所示。
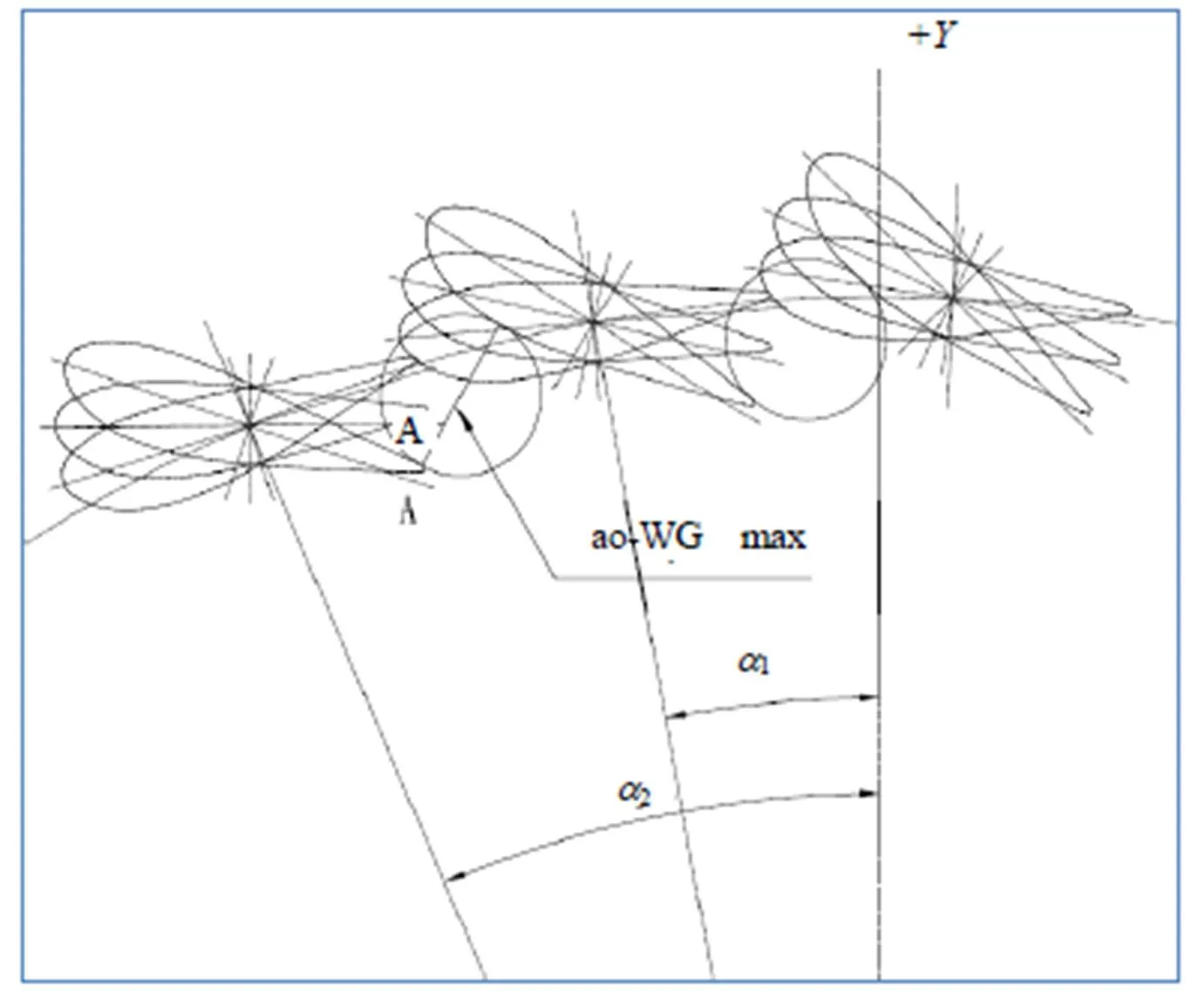
图2 导叶开度示意图
2.1 翼型点和尾部点的坐标转换
取与机组坐标规定相同的直角坐标作为基准O-O坐标,1号导叶轴心坐标为:1=-×sin(1),1=×cos(1),1号导叶坐标线相对于基准O-O坐标线的转角:(为导叶转角)。2号导叶轴心坐标为:2=-×sin(2),2=×cos(2),2号导叶坐标线相对于基准O-O坐标线的转角为:(为导叶转角)。翼型点B的坐标转换为:(1号导叶,相对于O-O坐标)X0=X×cos(1)+Y×sin(1)+1,Y0=Y×cos(1)-X×sin(1)+1。尾部点A的坐标转换为:(2号导叶,相对于O-O坐标)X0=X×cos(2)+Y×Sin(2)+2,Y0=Y×cos(2)-X×sin(2) +2。
2.2 A和B间的距离及导叶开度
A和B间的距离为:

3 导水机构的行程求解
根据导水机构的平面布置关系对导叶传动机构的运动关系进行计算,求出接力器行程。
3.1 基本数据
控制环分布圆直径D(R=D/2);接力器分布圆直径D(R=D/2);导叶臂长度L;连杆长度L;导叶臂轴线角度(相对于导叶Y轴线);导叶转角Δ;导叶臂轴线起始角度:;导叶臂轴线终止角度:。
3.2 导水机构控制环的行程求解
按几何关系求解控制环的行程,如图3所示(计算过程略)。
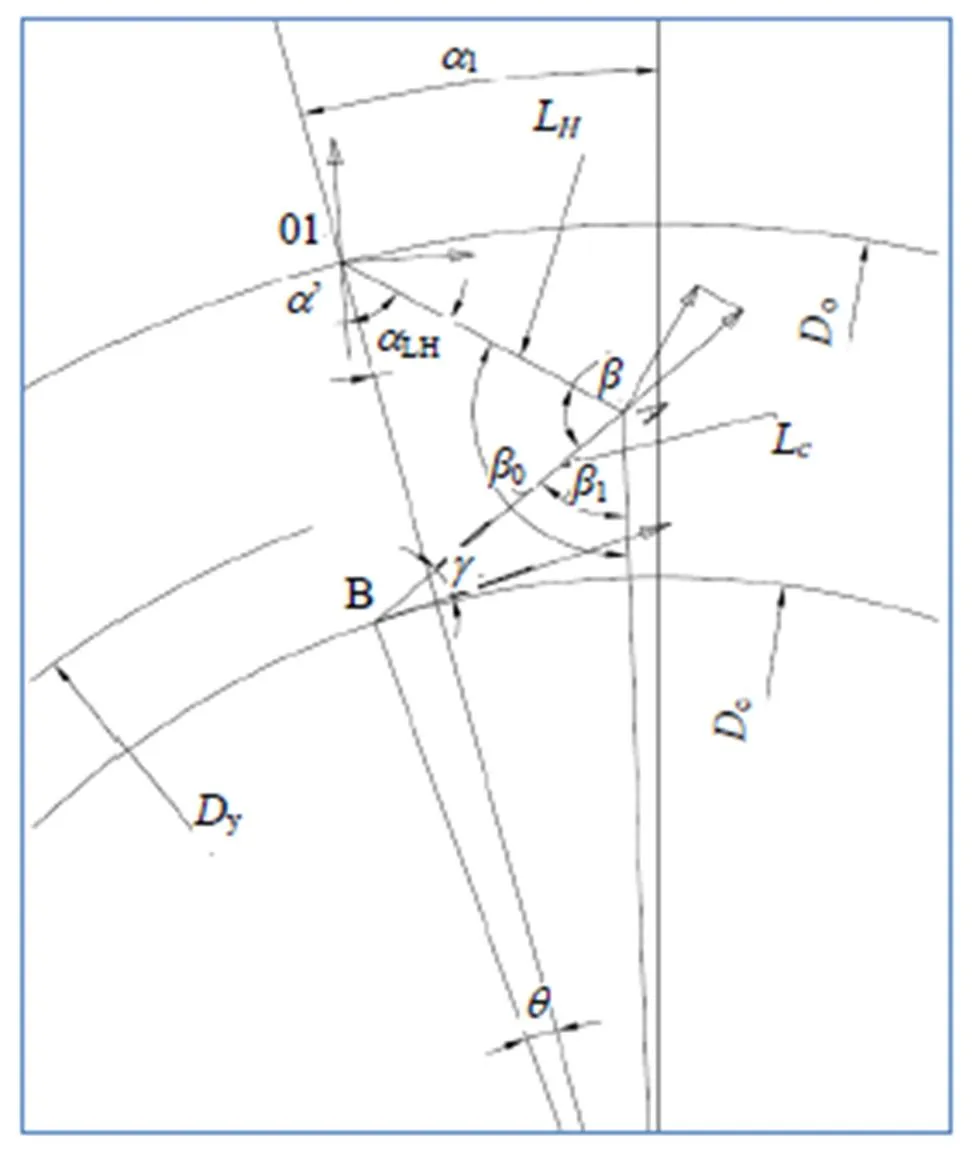
图3 导水机构的行程求解示意图
4 导叶型线的减薄/增厚
对翼型方程进行法线求解,以模拟导叶型线的加厚或减薄。型线求解,如图4所示。
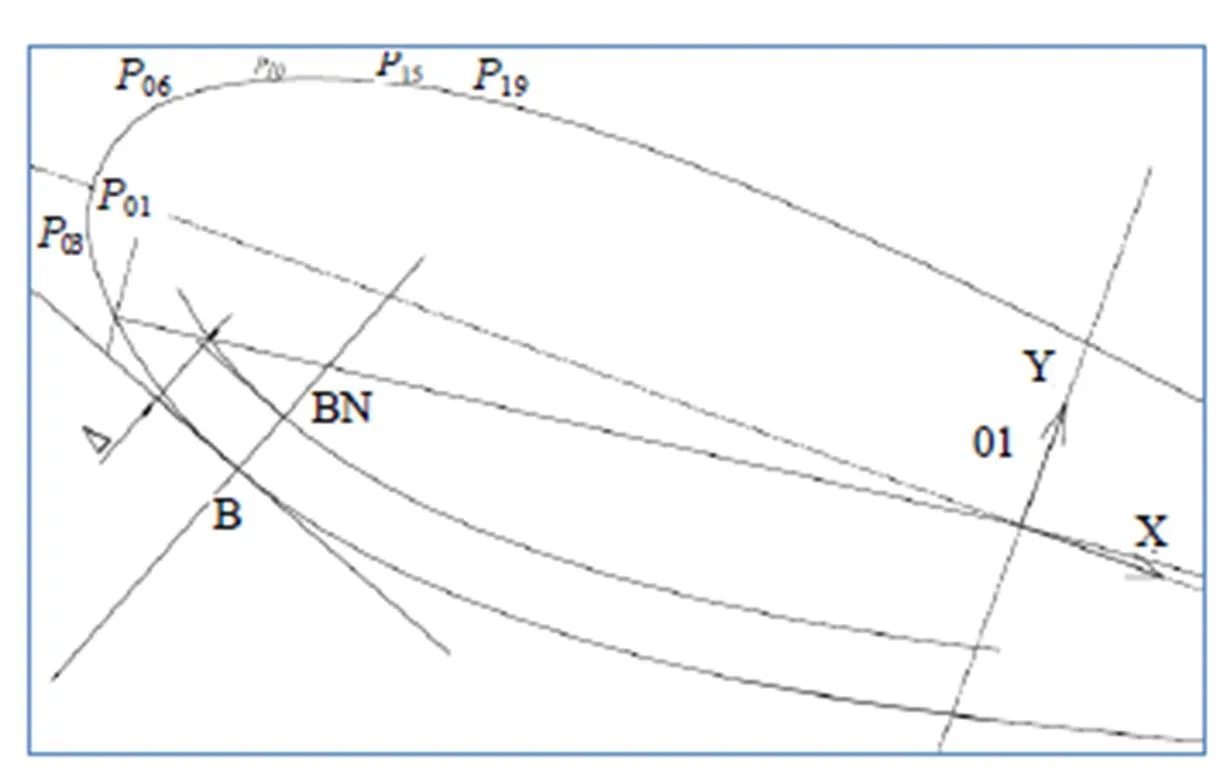
图4 导叶型线的减薄/增厚示意图

又:

(8)

5 带偏心销的导水机构的行程求解
加入偏心值至导水机构的平面布置图中,对导叶传动机构的运动关系进行计算,求出影响接力器行程的关系式。
此计算分为2种情况,偏心销设在控制环端和偏心销设在导叶臂端。
(1)偏心销设在控制环端
基本数据:控制环分布圆直径D(R=D/2);接力器分布圆直径D(R=D/2);导叶臂长度(ΔL为导叶臂长度允许误差);连杆长度(ΔL为连杆长度允许误差);导叶臂轴线角度(相对于导叶Y轴线)(为导叶臂轴线角度允许误差);偏心销的偏心值;导叶转角(试算得出);减薄/增厚的型线(见前述);新的尾部点(考虑尾部点的误差);导叶臂轴线起始角度:;导叶臂轴线终止角度:。
导水机构的行程求解:按几何关系求解控制环的行程,如图5所示。(计算过程略)。
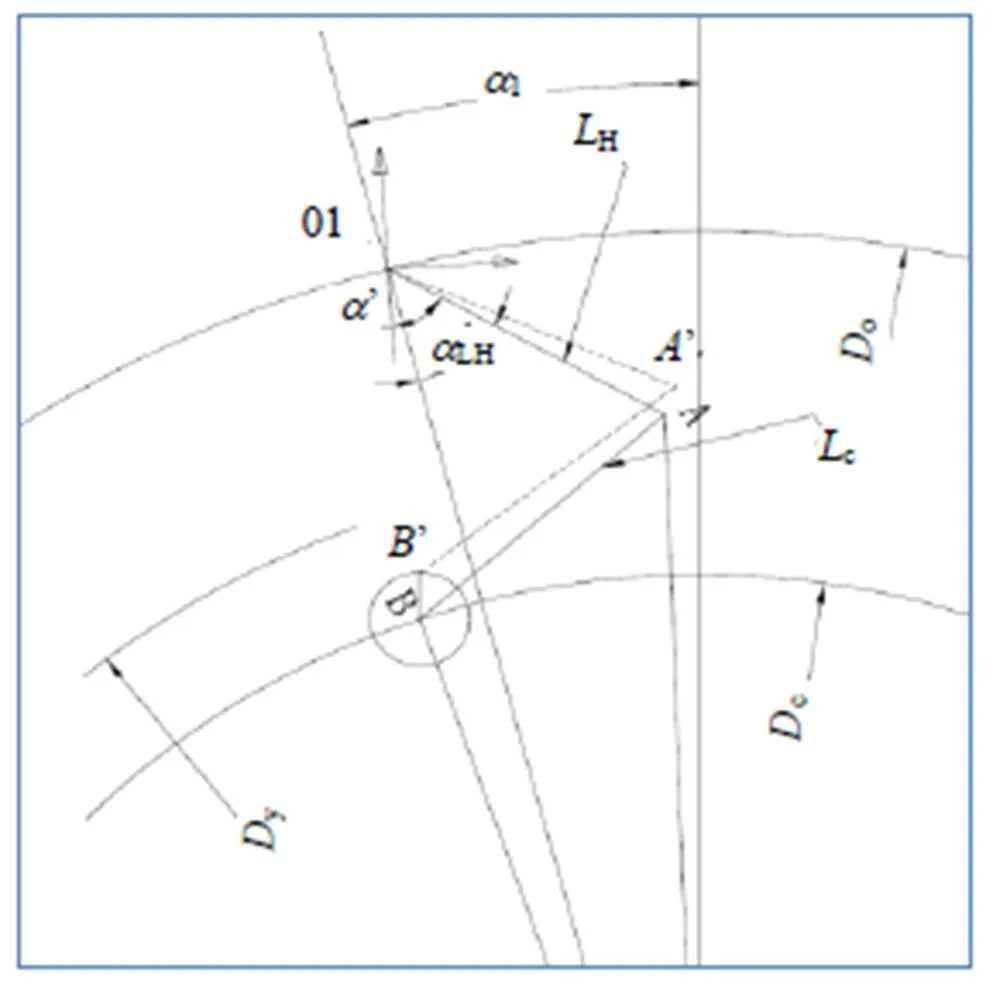
图5 偏心销设在控制环端的导水机构的行程求解示意图
(2)偏心销设在导叶臂端
几何计算过程与前述相同,并且从计算结果看出,偏心值相同的两种偏心销位置对导叶开度的误差影响是大致相同的,故略去此计算推导过程。
6 计算实例及分析
对7个项目的偏心值进行了校核分析计算,得出如下结果,见表1:
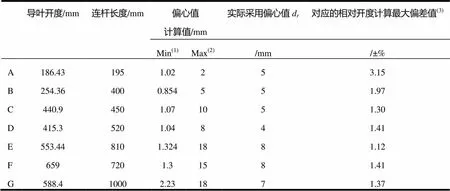
表1 偏心值计算分析结果
(1)偏心值计算最小值,为在导叶全关位置,在存在导叶臂和导叶间的角度误差、导叶臂长度误差和连杆长度误差的情况下,连杆和控制环应满足最小联接的偏心值。
(2)偏心值计算最大值,为了在存在导叶臂和导叶间的角度误差、导叶臂长度误差和连杆长度误差以及型线偏差(减薄或增厚)的情况下,在接力器行程不变的前提下,满足开度误差小于IEC标准(±2%)的要求,确定的偏心值的最大值。
(3)按照实际采用的偏心值,考虑各种误差及偏差,对其对应的开度值进行计算校核。从表1可以看出,项目A实际采用偏心值为5mm,此偏心值已经超出满足开度极限值(±2%)的要求值,其对应的计算开度最大值即已超出开度极限值,为±3.15%,车间预装时此开度值为-3.07%,证实计算值的可信性。其它项目,除项目B偏心值等于极限值外,其余均在合适的取值范围内。
(4)另外,由于导叶分布圆上的导叶孔及控制环耳销分布圆耳销孔的位置度精度很高,导叶分布圆和控制环耳销分布圆的直径误差值与直径值相比是个微量,它的误差值对上述过程的计算结果的影响可以忽略不计。
7 结论
根据上述连杆偏心销偏心值校核分析结果,可以看出:对于小型机组,其偏心值的取值范围较窄,要小心选取,否则对开度影响较大;对于大型机组,其偏心值的取值范围较宽,对开度影响较小。
在计算分析中,确定导叶连杆偏心销偏心值的取值原则:
(1)偏心最小值应满足:在导叶全关位置,在存在导叶臂和导叶间的角度误差、导叶臂长度误差和连杆长度误差的情况下,连杆和控制环应能最小联接。
(2)偏心最大值应满足:在存在导叶臂和导叶间的角度误差、导叶臂长度误差和连杆长度误差以及型线偏差(减薄或增厚)的情况下,按照接力器行程不变的前提,满足开度误差小于IEC标准(±2%)的要求,确定偏心最大值。
具体取值可参考前面计算实例总结的曲线图,如图6所示。
图6 导叶连杆偏心销偏心值取值总结图
[1] 奚梅成数值分析方法[M]. 合肥:中国科学技术大学出版社,2007.8
[2] 孟宪铎解析画法几何[M].北京:机械工业出版社,1984.12
Calculation and Analysis of Trunnion Eccentric Value of Wicket Gate Link
GAO Feng
(ALSTOM Hydro China Co., Ltd, TianJin 300300, China)
The trunnion eccentric pin of link is set to compensate the set deviations of angles between wicket gate and lever, length of lever and length of link. It can ensure the correct connecting between link and control ring/wicket gate lever by adjusting the eccentric pin orientation, while wicket gate being closing position. By mathematical analysis method, within the eccentric value to the math mode, it will analyze the full mathematic calculating result in the article. It includes calculation about wicket gate’s contact line/angle, WG opening and WG mechanism move law. The scope of the correct eccentric value can be got.
eccentric pin; eccentric value; opening of wicket gate; stroke of servomotor
TK730.3+24
A
1000-3983(2016)05-0048-04
2016-04-07
高峰(1963-),1985年毕业于陕西机械学院水能动力工程专业,现从事水轮机结构设计工作,高级工程师。

通讯地址:天津市空港经济区经三路237号阿尔斯通水电设备(中国)有限公司水轮机设计处,电话:022-58962663。
第一作者简介:
1963年出生;
1985年7月毕业于陕西机械学院水利系水能动力工程专业,大学本科学历;
现从事水轮机结构设计工作,高级工程师;
联系电话:022-58962663,手机号:13662005627;
通讯地址:天津市空港经济区经三路237号,阿尔斯通水电设备(中国)有限公司工程部,邮编:300300
审稿人:宫让勤
