投射式电容触摸屏高精度驱动与检测方法
2016-10-14张晋芳陈后金张利达
张晋芳,陈后金,张利达
投射式电容触摸屏高精度驱动与检测方法
张晋芳1,陈后金1,张利达2
(1. 北京交通大学电子信息工程学院 北京海淀区 100044;2. 北京集创北方科技有限公司 北京海淀区 100088)
抗噪声能力是投射式电容触摸屏驱动和检测电路的难点。在研究电容式触摸屏驱动的基础上,提出了一种电容触摸屏高精度驱动与检测方法,通过采用多电极驱动结合IQ正交解调技术,选取合适的驱动矩阵有效地降低感应电极耦合信号的干扰噪声、并消除由信号传输路径不同所引入的相位差,获得信噪比高、一致性好的解调数据。实验测试表明,采用该方法可以实现高性能、低成本触摸屏驱动芯片,为用户带来更好的触控体验。
抗噪声技术; 集成电路设计; IQ正交解调; 多电极驱动; 投射式电容触摸屏
投射式电容触摸屏是目前广泛应用于手机、平板电脑等便携式电子设备上的人机交互系统。一般电容触摸屏结构由水平方向和垂直方向交叉排布的驱动电极和感应电极组成。投射式电容触摸屏感应原理为:驱动电极和感应电极之间的交叠部分都存在耦合互电容,在驱动电极上施加交流激励时,感应电极即能接收到经过耦合电容传递来的信号,经感应端对感应电极耦合信号的解调,检测由触摸所引起的耦合互电容的变化,从而还原出触摸的状态及位置。
耦合互电容的变化反映了触摸状态和位置的变化,投射式电容触摸屏容易受到来自系统外部和内部噪声的干扰,如充电器干扰噪声、LCD显示屏噪声、LED噪声,以及由触摸手指引入的环境干扰噪声等,此类噪声将通过互电容耦合到感应电极形成耦合信号的干扰,从而影响触摸感应检测的精度与系统运行的稳定性[1-2]。
投射式电容触摸屏的驱动和检测电路主要有离散时间系统和连续时间系统两种方式。离散时间系统多采用开关电容电路实现[3-4],这类电路系统主要通过模拟电路设计在时域上消除噪声,但需要在芯片内集成面积较大的电容阵列,因而成本较高,不适合大尺寸多通道的触摸屏控制。连续时间系统采用周期三角波[5-6]、方波或者正弦波驱动触摸屏,在检测电路中用于驱动同频信号进行解调,可以从频域上消除噪声。而连续时间电路系统面临的问题是屏上信号传输路径不同引入的幅度相位差异导致触摸数据的一致性不理想。
为了提高连续时间电容触摸屏驱动和检测电路的抗噪声能力,解决触摸数据一致性问题,本文提出了一种高精度电容触摸屏控制芯片的驱动与检测方法,经实验仿真与系统测试验证可使触摸屏系统达到很高的抑制噪声能力,实现高精度的触摸检测。
1 驱动架构与耦合信号IQ解调方法
假设电容触摸屏由个驱动电极和个感应电极组成,如图1所示,从而形成´的交叠互电容矩形阵列。
矩阵表示交叠互电容矩形阵列的互电容值,有:
扫描时间段内,施加在每个驱动电极上的驱动信号分别表示为1,2, …,S,则在第个感应电极上接收到的耦合信号Y为:
考虑用正弦波作为驱动电极激励信号的情况,驱动信号则可表示为=sin(2π),其中取值为1、-1或0,分别表示施加到驱动电极的信号为正向、反向正弦波或零驱动。实际上,考虑到触摸屏上每个驱动电极到感应电极的路径并不相同,不同路径走线阻抗会引入不同的相位延迟,那么在第个感应电极端接收到的信号应为:
触摸耦合信号的解调过程是根据感应电极接收信号还原出各个交叠电容的过程。由于耦合信号中存在不等的相位延迟,如不加处理则会影响检测数据的全屏一致性,带来触摸检测的困难。为了消除相位延迟的影响,本文应用IQ正交解调技术,在感应端分别用与驱动同频的正弦和余弦信号对接收信号进行解调[7]。根据正弦信号的周期性,这里只考虑单个周期内的情况,有:
由于存在个驱动电极,为了求得整个电容触摸屏中的所有电容值,则需要次扫描,对于第个感应电极,有:
将式(6)扩展到整个电容触摸屏中的所有感应电极,得到:
即:
同理可得Q分量的关系为:
式中,
即是触摸屏的驱动矩阵。为了得到和,矩阵必须是可逆矩阵,有:
通过式(11)求得和,将对应元素平方相加,即可消去延时的影响,得到:
从而得到全部待检测电容值。
2 驱动矩阵A的设计与仿真
驱动矩阵对系统抗干扰能力具有一定的影响,假设一组扫描中,感应电极接收到的信号为,而在无干扰状态下接收到的理想信号为0,令=-0,而=,所以有[3,8-9]:
式中,是解调结果;0是理想值。选择合适的驱动矩阵,使得-1项尽可能小,则系统可以得到非常接近理想值0的解调结果。
在触摸屏控制系统的设计中,可以式(12)作为选择驱动矩阵的判断标准,通过仿真比较出每种驱动矩阵的抗干扰能力。仿真采用以下流程:
1) 产生备选的所有元素为1、-1或0的´阶可逆矩阵;
2) 产生组不同来源的感应偏差矩阵1~;
3) 计算-11,-12, …,-1,统计计算结果矩阵中所有元素的标准差,标准差越小,表明解调结果跳动越小,其抗噪声性能越好;
4) 反复重复步骤1)~步骤3),直到选出合适的驱动矩阵。
以驱动电极数= 8的情况为例,需要产生8阶的驱动矩阵。表1给出了8阶单位矩阵、Hadamard矩阵、主对角线下三角矩阵的仿真结果,并且通过仿真分析了所有的符合条件的8阶循环矩阵,其解调数据噪声最低的两种循环矩阵也在表1中列出。
用单位矩阵驱动,所有驱动电极按次序依次单独扫描的方式,可以看出这种驱动方式的抗噪声能力较弱。Hadamard矩阵的抗噪声能力强,但是这种矩阵本身有一行元素全部为1,相当于所有的驱动电极在一个扫描时间段内同时发送相同相位的正弦波,这些同相波形在感应电极会叠加到一起,容易造成感应端电路饱和,而电路发生饱和相当于改变了驱动矩阵的系数,可能导致解调错误。而循环矩阵1和2由于抗噪声能力较好,相比单位矩阵噪声跳动减小约8 dB,且任意扫描时间段的驱动强度都较小,适合用作驱动矩阵。
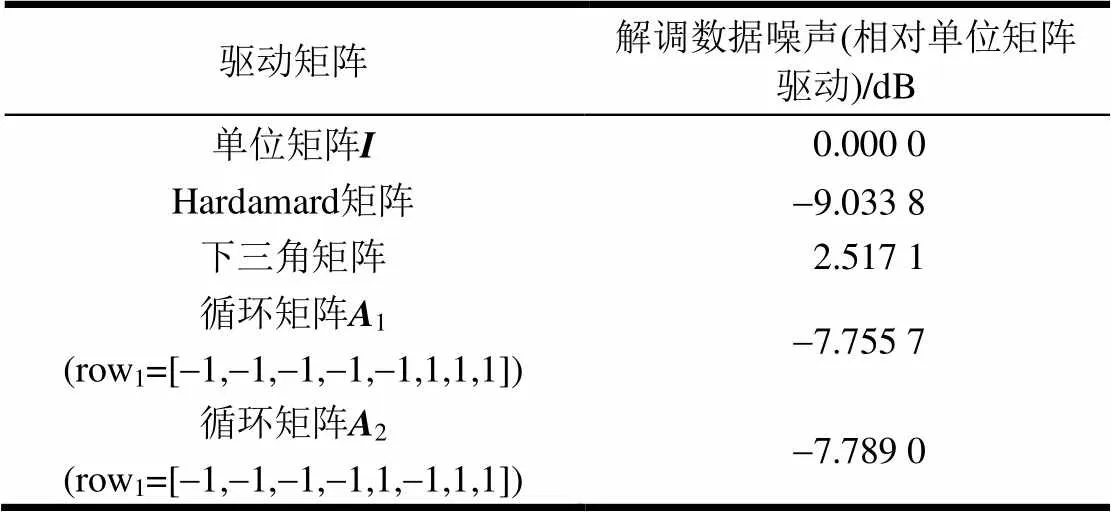
表1 不同驱动矩阵A的解调数据标准差
3 实验测试与结果分析
为测试该方法的抗噪声性能,搭建了如图2所示的采用多电极同时驱动与IQ解调方法的触摸屏控制芯片系统,其中数字正弦余弦发生器都由高速数字电路实现,确保实现驱动、解调信号频率和幅度的连续精确可调。IQ正交解调运算单元则由32位高速MCU完成,可以达到100帧/s触摸数据图像的生成速率要求。
该驱动芯片现已实现量产,为测试性能将该控制芯片连接一块具有20条驱动电极和12条感应电极的电容触摸屏进行测试与分析。该触摸屏的驱动电极近端电阻约100 Ω,远端电阻约1.4 kΩ,感应电极近端电阻约1 kΩ,远端电阻约41 kΩ。利用90 kHz的正弦波作为触摸屏激励信号,进行100次扫描。将I解调和IQ解调后得到的100帧图像分别作平均,得到最终的平均图像。
图3a是用单位矩阵驱动,I解调所得的结果,触摸图像在电阻较大的感应线方向上数据图像具有显著梯度,且抖动明显。图3b是用经过挑选的循环矩阵驱动IQ解调的结果,在驱动线和感应线两个方向上的数据梯度都得到了明显改善,并且数据抖动减小,良好的数据一致性为触摸和手势识别的算法实施提供了保证。
4 结束语
本文提出的投射式电容触摸屏的高精度驱动与检测方法,使用了多电极驱动加IQ正交解调技术,通过选择合适的驱动矩阵,可有效地降低系统噪声,并且消除由信号传输路径不同所引入的相位差,得到信噪比高、一致性好的解调数据。以解调数据为基础的触摸检测和位置计算可以更加精确,使用户得到更好的触摸体验。
参 考 文 献
[1] HOTELLING S, KRAH C, HUPPI B. Multipoint touch surface controller: US patent 0257890 A1[P]. 2007-11-08.
[2] KRAH C, HOTELLING S, O’CONNOR S. Detection of low noise frequencies for multiple frequency sensor panel stimulation: US patent 0025634 A1[P]. 2011-02-03.
[3] YANG J, JUNG S, SON Y. A noise-immune high-speed readout circuit for in-cell touch screen panels[J]. IEEE Transactions on Circuits and Systems, 2013, 60(7): 1800-1809.
[4] ZHAN S, WEI T, LI B. A touch sensor controller IC adopting differential measurement for proected capacitive touch panel systems[C]//Preceedings of the IEEE on Computer and Information Technology. Chengdu: IEEE, 2012: 477-481.
[5] SHIN H, KO S, JANG H. A 55 dB SNR with 240 Hz frame scan rate mutual capacitor 30x24 touch-screen panel read-out IC using code-division multiple sensing technique[C]//Preceedings of the IEEE on Solid-State Circuits Conference. San Francisco, USA: IEEE, 2013: 388-389.
[6] LIM D, PARK J, JEONG D. A low-noise differential front-end and its controller for capacitive touch screen panel[C]//European Solid-State Circuits Conference. Bordeaux, France: [s.n.], 2012: 237-240.
[7] COLEMAN J. Signals and systems II-Part IV: DSP approaches to IQ modulation and demodulations[J]. Potentials, 2010, 29(4): 33-36.
[8] KURTHREVOLDS J. Methods and systems for detecting a position-based attribute of an object using digital codes:US patent 7868874 B2[P]. 2011-01-11.
[9] MA H, HEO S, KIM J. Algorithm for improving SNR using high voltage and differential Manchester code for capacitive touch screen panel[J]. Electronics Letters, 2014, 50(24): 1813-1815.w
编 辑 税 红
A High Precision Drive and Detection Method for Projected Capacitive Touch Panel
ZHANG Jin-fang1, CHEN Hou-jin1, and ZHANG Li-da2
(1. School of Electronics and Information Engineering, Beijing Jiaotong University Haidian Beijing 100044; 2. Chipone Technology (Beijing) Co., Ltd. Haidian Beijing 100088)
Anti-noise performance is a key issue for the implementation of the projected capacitive touch-panel detection circuit. Based on an analysis of driving and sensing methods, a high-precision drive and detection method for projected capacitive touch panel is presented in this paper. Combining both the multiple electrode drive and the IQ(in-phase quadrature) demodulation method for touch sensing, an appropriately selected driving matrix can be designed to significantly reduce the noise aroused by the touch sensor system. In addition, the IQ demodulation method can be used to eliminate completely the phase delays caused by transmission paths. The results indicate that the proposed method can be used to design a high-performance controller chip for capacitive touch-panel detection circuit with a low cost.
anti-noise; IC design; IQ demodulation; multiple electrode drive; projected capacitive touch panel
TP391
A
10.3969/j.issn.1001-0548.2016.05.009
2015-11-12;
2016-04-28
北京市科技计划课题项目(D151100000415002)
张晋芳(1985-),男,博士生,主要从事信号与信息处理、投射式电容触摸屏驱动信号处理、触控集成电路设计等方面的研究.
