铁路工程中海量机载激光雷达数据构网与管理方法研究
2016-10-14程寇
程 寇
(铁道第三勘察设计院集团有限公司,天津 300142)
铁路工程中海量机载激光雷达数据构网与管理方法研究
程寇
(铁道第三勘察设计院集团有限公司,天津300142)
激光雷达点云数据存在着数据存储量大、数据构网困难、文件传输不便等缺点,如何形成一种有效的海量激光雷达数据构网与管理方法便显得很有必要。提出一种点云数据构网与管理方法,并通过系统开发,实现了高精度点云数据的空间构网与管理,能准确的对复杂地表进行三维重建,还原地形细节,为正射影像加工、断面制作、地形图生产提供可靠的保障。
机载激光雷达三角网构建数据管理点云
1 概述
机载激光雷达(Light Detection and Ranging,简称LiDAR)是一种集成了激光测距、全球定位、惯性导航等技术的新型遥感设备。LiDAR使遥感技术在三维空间信息的快速和精确获取方面取得了重大突破,代表了对地观测领域的发展方向之一,为快速高效获取地表三维信息提供了强有力的支持。随着电子科技水平和制作工艺的不断提升,各种先进的新型传感器在国内市场的份额逐年增加,采集、加工激光雷达点云数据产品的市场也越来越大。
数字高程模型(Digital Elevation Model, DEM)作为描述地表信息的基础数字产品,是地理信息系统(Geographical Information System, GIS)空间数据库的核心和地学分析的基础,也是工程建设、仿真分析、三维可视化等诸多领域的基础数据之一。
在DEM的各种表示方法中,不规则三角网(Triangulation Irregular Net, TIN)作为地表的数字化表现手段和分析工具,以其结构良好、数据存储简单、地表重构精度高及对不规则区域和数据点分布密度使用能力强等特点,在铁路、公路勘测设计一体化,GIS领域都得到了广泛应用。不规则三角网能用更少的空间和时间更加精确的表示复杂表面,还原地形细节,其构网原理与方法一直是国内外学者研究的重点。
LiDAR点云数据的数据量由点密度和数据覆盖的地理范围正相关,在工程应用中,数据覆盖范围很容易达到上千平方公里,按照0.5~1 m的点间距,数据量可达上百GB。目前,国内外使用较多的点数据构网与应用软件(如基于Microstation平台的Terrasolid软件,国内武汉大学自主研发的TINModel软件等),在针对海量点云数据的处理时,其效率和准确性往往无法保证工程应用需要。同时,国内外已有的各类成熟软件研究重点是在点云数据处理方面,在针对海量数据的管理和应用方面的研究相对较少。
结合铁路工程线性分布与LiDAR点云数据的特点,提出一种点云数据构网与管理方法,并通过系统开发,实现了高精度点云数据的空间构网与管理,能准确的对复杂地表进行三维重建,还原地形细节,为正射影像加工、断面制作、地形图生产提供可靠的保障。
2 构网与管理流程
本文提出的点云数据构网与管理方法,其主要流程是:①通过其获取到的高精度点云数据进行基于数据重叠的点云分块;②对特征数据进行解析,结合分块数据进行基于特征约束条件下的Delaunay三角形构网,并对三角网进行简化;③构建块数据的空间索引和拓扑关系;④建立三角网数据动态调度机制。之后,系统会提供数据访问接口,以便进行正射影像加工、断面制作、地形图生产等。
图1为本方案流程图及介绍说明。

图1 Lidar点云数据构网与管理流程
3 关键技术研究
3.1点云分块
目前常用的点云分块方法是对点云进行严格划分,块与块之间具有严格分界线,分界线上的点为相邻两块点云数据所共有,同时点云数据文件中还需记录边界线信息。但采用该种方法给点云分块和后续的三角网构网、分块数据管理增加了复杂度。
本文提出的激光雷达点云数据的分块,区别于常规的数据分块方法,需考虑如下因素:①单块的数据量;②分块编号和查找;③重叠区与接边。当分块点云用于分块三角网的构建时,则需根据三角网分块管理的特点,对点云分块提出新的要求,否则数据构网过程中容易出现漏洞和区域构网不一致的情况。
为了简化过程,实现点云数据分块和三角网构网完全独立,采用具有较大重叠度的点云分块方法。当重叠区足够宽时,采用具有唯一性的三角网构网算法构网,各三角网数据在重叠区的中心部分构网结果一致,重叠区的边缘部分构网结果不一致。只要确保中线附近不同块数据的三角网一致,即可实现分块三角网的接边。
图2为点云数据分块处理流程。

图2 Lidar点云数据分块流程
3.2特征约束下的不规则三角网构建
Delaunay三角网可以很好地拟合现实地形地貌,构网过程具备唯一性,因此在地形表达上是最常用的方法。Delaunay三角网生成方法中最常用的是逐点插入法,该算法虽然实现过程相对简单,所需内存较小,但计算复杂度高,运算速度较慢。
在地形模型构建中,特征线也是常见的地形表达因素。在沟坎等地形突变地区,激光点云受点间距限制,对地形的表达存在较大失真,一般采用特征线来约束三角网,提高局部地形的表达精细度。
综上分析,提出一种基于特征约束下的Delaunay三角网构建方法。该方法是对传统逐点插入法的改进算法,其基本思想和步骤如下:
①将点落入的三角形分裂成3个新三角形,三角网中新增2个三角形;
②调整三角网邻边关系;
③取原三角形的某一条边,取该条边两侧的两个三角形,其中一个三角形以新插入点为顶点
④判断新插入点是否落入邻边三角形的外接圆;如果落入,则对这两个三角形重构。
该方法结构示意如图3所示。
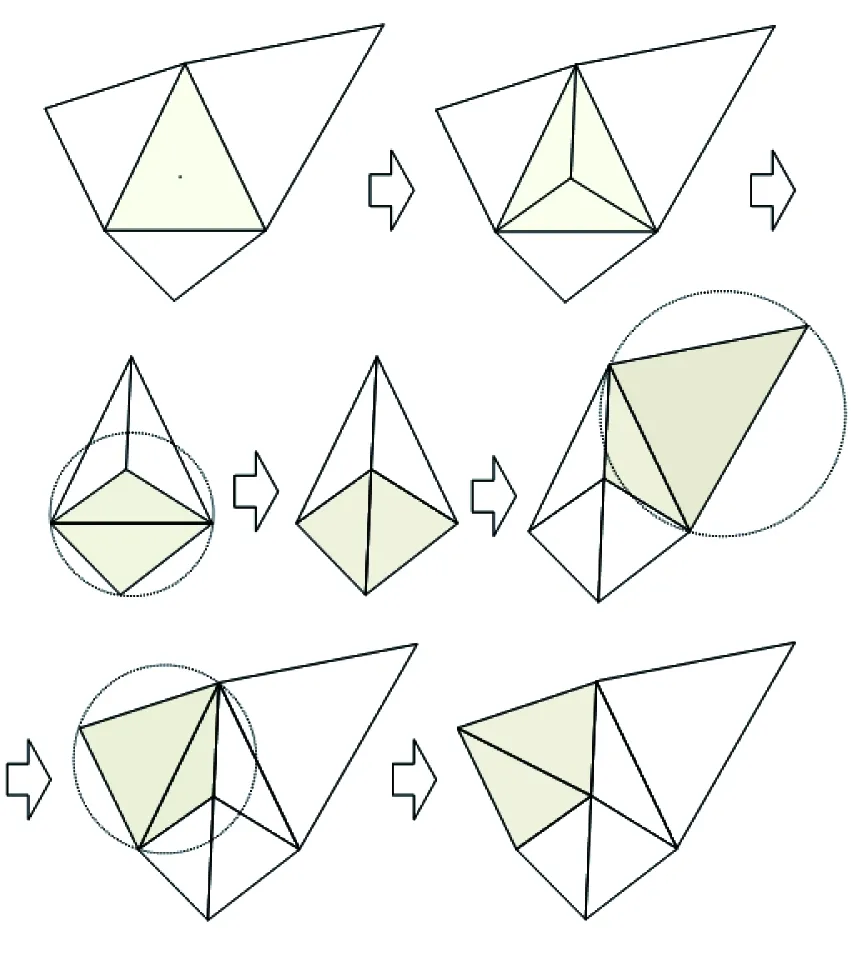
图3 逐点插入算法示意
3.3空间索引构建
在海量三角网中,快速查找定位三角形是最常用的方法。由于三角网中记录了三角形的邻边关系,在小范围内,通过一个初始三角形,可以通过邻边查找定位到目标三角形。初始三角形的选择决定了查找的次数;初始三角形离目标点越近,则查找次数越少。图4所示为基于三角形邻边拓扑关系的快速检索方法。

图4 三角形快速检索方法示意
按照平面规则格网对三角网进行分块编号,在每一块中取一个三角形作为该块的初始三角形。对于任意查询点,可通过坐标确定格网号,通过格网号找到当前块的初始三角形,然后通过邻边查找,定位到当前点所在的三角形。
三角形格网分块索引的建立方法如下:①确定格网大小;②遍历点,获得三角网最大外接矩形围;③计算横纵方向格网个数,并依次对格网编号;④遍历三角形,判断当前三角形重心落入哪个格网内,将该格网的三角形索引号设置为当前三角形号;⑤如果当前格网内的三角形索引已经赋值,则跳过;⑥完成三角形遍历后,检查每一个格网的三角形索引是否有空值,若有,则取离当前格网最近格网的三角形索引号,作为当前格网的三角形索引号。
其结构示意如图5所示。

图5 三角形分块快速检索示意
4 项目应用
为了更好的结合项目生产,借助于visual studio 2008 开发平台,开发了一套LiDAR数据构网与管理系统,并在赤峰接京沈联络线LiDAR项目中开展应用。
图6从左到右分别为系统主界面和分块后的数据文件。

图6 赤峰接京沈联络线LiDAR项目应用示意
赤峰接京沈联络线正线长186 km,采用机载Lidar设备对全线进行数据获取,点云成果数据量为52 GB左右。通过在该项目中实施点云数据分块构网及空间索引建立,大大提高了纵断面绘制、横断面生产、工点地形图制作等工序的生产效率。
图7为采用Lidar数据构网与管理系统接口进行路基横断面生产和线路纵断面生产的示意。

图7 利用分块数据进行纵断面和横断面批量切绘
5 结论
针对铁路工程中LiDAR点云成果存储量大、构网困难以及数据传输不便等问题开展了基于海量点云构网和管理方面的研究,并在点云分块、特征约束下的不规则三角网构建、空间索引建立等关键技术上提出了自己的思想,并通过程序予以实现。
目前,该实验成果已应用于相关项目生产中并发挥了较大作用,一定程度上提高了断面制作和工点地形生产的效率。同时,软件系统的成果开发也为LiDAR点云数据的深化应用提供了借鉴和参考。
[1]王晏明,郭明.大规模点云数据的二维与三位混合索引方法[J].测绘学报,2012(8)
[2]高文峰,王长进.铁路勘察中使用机载激光雷达测绘横断面相关问题的探讨[J].铁道勘察,2010(2)
[3]李平苍.机载激光雷达技术在铁路横断面测绘中的应用[J].铁道勘察,2013(5)
[4]许多文.不规则三角网(TIN)的构建及应用[D].赣州:江西理工大学,2010(11)
[5]杨军,高莉.格网划分的Delaunay三角网快速生成算法[J].测绘科学,2015(7)
[6]李娜.Delaunay三角网动态更新算法的研究进展[J].计算机系统应用,2015(2)
[7]苗启广,史俊杰,刘天歌,等.一种快速生成DSM的不规则三角网构网新方法[J].系统工程与电子技术,2014(5)
[8]张春亢.基于海量机载LiDAR数据的规则格网生成算法研究[D].福州:福建师范大学,2012
[9]郭明.海量精细空间数据管理技术[D].武汉:武汉大学,2011
[10]未永飞,杜正春,姚振强.激光雷达扫描数据的快速三角剖分及局部优化[J].激光技术,2009(12)
[11]朱庆,李志林.数字高程模型[M].武汉:武汉大学出版社,2000
The Method for TIN Construction and Management with Massive Airborne Lidar Data in the Application of Railway Engineering
CHENG Kou
2016-03-22
程寇(1985—),男,2009年毕业于武汉大学摄影测量与遥感专业,硕士,工程师。
1672-7479(2016)04-0027-03
P225.2
A
