多通信半径的无线传感器网络DV-Hop定位算法*
2016-10-13马淑丽赵建平
马淑丽,赵建平
(曲阜师范大学物理工程学院,山东曲阜273165)
多通信半径的无线传感器网络DV-Hop定位算法*
马淑丽,赵建平*
(曲阜师范大学物理工程学院,山东曲阜273165)
为了实现无线传感器网络中基于无需测距DV-Hop定位算法的高精度定位,改进基于2、3通信半径的DV-Hop节点定位算法,并利用最小均方差准则改进计算平均每跳距离的公式,在最佳指数值下,修正锚节点平均每跳距离。MATLAB仿真结果表明,改进的算法在随机分布环境能提高节点定位精度;在最佳指数值下,进一步提升节点定位精度;在锚节点人工部署环境下,大大提高节点定位精度。改进的算法实现高精度定位同时,不需要增加网络泛洪次数和硬件成本。
无线传感器网络;节点定位;DV-Hop;最小均方差;节点部署
EEACC:6150Pdoi:10.3969/j.issn.1004-1699.2016.04.021
随着微控制系统与短距离无线通信技术[1]的发展,无线传感器网络WSN(Wireless Sensor Network)技术作为新兴的物联网重要技术之一,在过去的十几年时间迅速发展。无线传感器网络技术广泛应用于农业监控、核辐射检测、森林监测、敌军领域侦查等人不能长时间滞留的环境,由大量微型传感器节点组成[2],每个节点由传感器模块、无线通信模块、控制模块、存储模块、计算模块等构成。节点将采集到的物理界[3]的信息最终传送到监控中心或用户。一些跟踪定位的应用如森林防火、搜索和救援[2]、敌军区域监测[4]等不仅需要知道节点采集的事件信息还需要知道事件发生的位置,所以节点定位技术在无线传感器网络中相当重要[2]。根据位置是否已知,节点分为两类,一类是位置固定即人工部署[2]或有GPS、北斗等导航设备的节点。这类节点知道自己的位置信息,称为锚节点,成本比一般节点高,在定位过程中能量消耗也比较大[4],所以网络中锚节点的数量较少[2,4]。另一类节点通过飞机撒落等途径随机分布[2,4]在网络中,不知道自身位置信息,是需要定位的节点,称为未知节点。未知节点依靠锚节点来定位,当未知节点得到超过三个锚节点位置信息及距离时[4],可用三边测量法、多边测量法等估算自身位置。一般,根据是否基于节点间精确距离的定位,将定位技术分为两大类,一类是高成本、高定位精度的基于测距(Range-Based)的定位[2,5]。这类定位技术,需要知道节点之间的精确距离或角度[1-2],然后用三边测量法或三角形[1]关系定位。如RSSI定位算法,节点需要微波发射硬件设备,向周围发射无线微波信号,接收节点根据信号的强弱[2],通过信号衰减模型公式计算与其它节点间的精确距离。另一类定位技术是低成本、低精度的基于无需测距(Range-Free)的定位[2,5],这类定位技术不需要增加节点硬件设施,根据节点间的网络信息传输记录锚节点坐标信息和节点间的跳数值[5],然后估算节点间的距离。如DV-Hop(Distance Vector-Hop[6])算法,节点根据到锚节点间的跳数和坐标信息,估算节点间的距离,由于估算时将跳段距离代替直线距离[7],误差很大,定位精度不高。在一般的粗精度定位应用中,定位精度在0.4以下即可[8-10]满足。
文献[11]提出基于双通信半径的DV-Hop算法,文献[12]提出基于3通信半径的DV-Hop算法,文献[13]提出基于多通信半径的加权DV-Hop算法,都大大提高了定位精度。文献[13]指出通信半径越多定位误差越小,但是锚节点泛洪次数越多,能量消耗越大,由于无线传感器网络中节点由单独电源供电,电池的消耗[10]直接影响整个网络的生命周期,所以本文只考虑改进基于2、3通信半径的多通信半径DV-Hop算法。文献[14]提出最佳指数值概念,并将改进的DV-Hop算法应用在文献[15]提出的一种锚节点人工部署环境。本文结合上述文献,改进DV-hop算法。主要思想是将锚节点分配多个通信半径,未知节点固定为一个通信半径,采用最小均方差准则下的最佳指数值进一步减小锚节点平均每跳距离误差,从而提高节点定位精度。
1 DV-Hop定位算法与分析
1.1DV-Hop算法
DV-Hop定位算法是由美国罗格斯大学(Rutgers University)Dragos Niculescu等人在2003年提出的6种分布式定位算法之一[15]。
假设前提:网络中锚节点与未知节点都是随机分布,且有相同的通信半径,通信范围是以自身为圆点的圆。节点间可以互相通信,即具有接收和发送信息的功能。每个节点还具有计算[16]、存储功能[2]。
DV-Hop算法定位步骤:
Step 1锚节点以泛洪的模式[17]向网络发送自身坐标信息和初始跳数值0。
Step 2节点接收到信息后保存,并将跳数值加1后转发出去。多次转发过程中,节点只保存较小的锚节点跳数值和未曾保存过的锚节点坐标信息,当接收到比已经保存的跳数值大的信息则舍弃,停止转发。最终,网络中所有节点保存到每个锚节点的坐标信息和与其它锚节点间的最小跳数值[17]。
Step 3锚节点根据保存的其他锚节点坐标信息,计算出与其它锚节点间的距离。然后,根据保存的与其它锚节点间的最小跳数值,计算平均每跳距离,并作为校正值,向网络第二次泛洪广播。
一般,平均每跳距离根据无偏估计准则计算,需满足:

得出:

dHopi是锚节点i的平均每跳距离。dij是锚节点i、j间的距离。hij是锚节点i、j间的最小跳数。xi,yi是锚节点i坐标值,xj,yj是锚节点j坐标值。
Step 4未知节点只接收并保存离自己最近的锚节点校正值,即只接收第一个送达的锚节点校正值。
Step 5未知节点根据保存的与锚节点间的最小跳数值,和接收到的平均每跳距离(校正值)计算出与每个锚节点的估算距离。
Step 6未知节点得知至少3个锚节点的估算距离时,用极大似然法、多边测量法等估算自身坐标。
极大似然法计算节点坐标:

其中di是未知节点与锚节点i间的估算距离,xi,yi是锚节点i坐标值,n是锚节点个数,x,y是未知节点估算坐标值。
1.2DV-Hop定位误差分析
只是利用锚节点坐标信息和信息传输的跳数值定位,节点真实坐标与定位坐标之间误差很大。
如图1(a)所示,网络中分布着A、B、C 3个锚节点,其他为未知节点。锚节点B的平均每跳距离为,计算的锚节点B的平均每跳距离要小于实际平均每跳距离,误差较大。且锚节点B到锚节点A、C的每一跳距离长短不一样,每两跳段间都有角度(非180°),所以用直线距离除以跳数,求得锚节点的平均每跳距离并作为校正值,校正值误差很大。未知节点用校正值乘以最小跳数值估算与锚节点间的距离,导致估算距离误差很大,最终影响定位结果的精确度。一般,网络中未知节点占大多数,锚节点占少数。未知节点分布密度远大于锚节点的分布密度,再加上锚节点随机分布,锚节点间的距离时大时小,计算锚节点平均每一跳距离时误差波动大。所以考虑锚节点均匀分布减小误差。

图1 网络结构
在计算平均每跳距离时可以用多个通信半径计算跳数,可以得到更精确的跳数值。如图1(b)所示。D、E、F为锚节点,a、b、c、d、e为未知节点,通信半径为R。锚节点D与未知节点a、b的距离分别为R、0.5R,但是锚节点D向未知节点a、b发送信息时跳数值都是加1。同样,锚节点E与未知节点b、c的距离都为0.5 R,但是锚节点E向未知节点b、c发信息时跳数值是1。假如锚节点有两个通信半径分别为R、R/2,则当使用R/2通信半径时,节点D与b间的跳数值可以为0.5,节点E与b、c间跳数值可以为0.5。
文献[18-19]证明最小均方差准则下的定位误差要高于无偏估计准则下的定位误差。计算平均每跳距离可以考虑用基于最小均方误差准则,需满足:

2 算法的改进与应用环境
2.1基于双通信半径DV-Hop算法
文献[11]提出基于双通信半径的DV-Hop改进算法,使锚节点有2个通信半径,分别为R/2、R,未知节点1个通信半径R。假设网络中锚节点有延时发射信号功能,能调节信号发射的功率,使锚节点有两个通信半径,一种功率使通信半径为R/2,另一种功率使通信半径为R(即与未知节点发射功率相同)。文献[11]提出的基于双通信半径DV-Hop算法步骤:
Step 1锚节点以通信半径R/2向网络第一次泛洪广播自身位置信息和初始跳数值0.5,接收到的节点保存位置信息和初始跳数值。
Step 2锚节点延时T时间,以通信半径R向网络第二次泛洪广播自身位置信息和初始跳数值0。若接收节点已经保存该锚节点的位置信息和初始跳数值0.5,则舍弃,并将位置信息和跳数值0.5以通信半径R转播出去;若接收节点没有接收到第一次泛洪的信息,则保留第二次泛洪锚节点的位置信息和初始跳数值,并将初始跳数值加1后与位置信息以通信半径R转播出去。不断转播过程,接收节点只接收并保存较小跳数值的信息,将跳数值加1后转播。最终,所有节点保存与锚节点的最小跳数值和锚节点的坐标信息。
Step 3锚节点根据最小跳数值和坐标信息计算平均每跳距离,计算如式(2)。
Step 4锚节点将平均每跳距离作为校正值向网络第三次泛洪广播。未知节点只接收并保存离自己最近的锚节点校正值。剩余步骤与DV-Hop相同。
以上基于双通信半径的DV-Hop算法,比DV-Hop算法大大提高了定位精度。但是,在第二次泛洪时,若发送节点为未知节点,接收节点为锚节点,则未知节点到其一跳范围内的锚节点间的跳数值记为1。如果未知节点到锚节点的距离为R/2范围内,跳数值仍记1则导致计算平均每跳距离时的误差很大。如图1(b),未知节点d、e向锚节点F发送信息,如果按文献[11]算法,则跳数值都是加1,而未知节点d、e与锚节点F间距离分别为R、R/2。所以文献[11]算法只是将第一次泛洪时锚节点到未知节点的跳数值记为0.5或1,没有考虑转播过程中精化跳数值。
本文在文献[11]算法的基础上进一步精化跳数值。在第一次泛洪中,接收节点记录下与自己R/2距离内的锚节点的编号。在第二次泛洪中,第一次泛洪中的接收节点转播信息时,将锚节点的编号信息也转播。如果接收节点为编号对应的锚节点,该锚节点转播信息时,将跳数值加0.5后转播,而不是加1后转播。将改进的算法命名为2-DV-Hop(A)。
文献[14]在求平均每跳距离时,提出最小均方差准则下的最佳指数值概念,并验证了在最佳指数值概念下可以提高定位精度2%左右。在2-DV-Hop(A)算法基础上,本文结合文献[14],进一步改进算法,命名为2-DV-Hop(B)。在Step 3中用最佳指数值概念修正平均每跳距离。文献[14]改进式(9)中分母hij的指数,精化锚节点i的平均每跳距离dHopi,如式(10)。本文找出在不同锚节点覆盖率和不同通信半径下指数值α的最佳值,即使定位精度最高时的指数值,代入式(10)求平均每跳距离。

2.2基于三通信半径DV-Hop定位算法
文献[12]在文献[11]基础上提出基于三通信半径DV-Hop算法,使锚节点有三种发射功率,一种功率使通信半径为R/3,另一种功率使通信半径为2R/3,还有一种功率使通信半径为R,即与未知节点信号发射功率相同。本文改进的基于三通信半径的DV-Hop步骤:
Step 1锚节点以通信半径R/3向网络第一次泛洪广播自身位置信息和初始跳数值1/3,接收到的节点保存位置信息和初始跳数值,并记录下锚节点的编号,标记为第一次泛洪中锚节点的编号。
Step 2锚节点延时T时间,以通信半径2R/3向网络第二次泛洪广播自身位置信息和初始跳数值2/3,接收到的节点若已经保存位置信息和初始跳数值1/3,则舍弃,否则记录下锚节点的编号,并标记为第二次泛洪中锚节点的编号。
Step 3锚节点再延时T时间,以通信半径R向网络第三次泛洪广播自身位置信息和初始跳数值0,接收到的节点若已经保存位置信息和初始跳数值1/3或2/3,则舍弃,且将位置信息和跳数值1/3 或2/3以通信半径R转播出去。接收节点若没有接收到第一、二次泛洪的信息,则将初始跳数值加1后再将信息以R通信半径转播出去。不断转播,接收节点只接收并保存较小跳数值的信息。第一、二次泛洪中的接收节点在转播信息时,也转播锚节点的编号信息。如果接收节点为第一次泛洪中编号对应的锚节点,锚节点将跳数值加1/3后转播;如果接收节点为第二次泛洪中编号对应的锚节点,锚节点将跳数值加2/3后转播。其它接收节点将跳数值加1后转播。最终,所有节点保存与锚节点的最小跳数值和锚节点的坐标信息。将上述改进的算法命名为3-DV-Hop(A)。
Step 4锚节点根据最小跳数值和坐标信息计算平均每跳距离,计算如式(10)。用最佳指数值概念修正平均每跳距离,先求出使定位精度最高时的指数值α,然后再求平均每跳距离。将该步改进的算法命名为3-DV-Hop(B)。
Step 5锚节点将平均每跳距离作为校正值向网络第四次泛洪广播。未知节点只接收离自己最近的锚节点校正值。剩余步骤与DV-Hop相同。
2.3锚节点人工部署方式
很多文献从锚节点部署方式上提高定位精度,文献[12,15,20-21]分别提出了4种锚节点人工部署方式。经研究,文献[15]部署方式较为占优势。本文将算法应用在文献[15]环境中,命名为2-DV-Hop(C)、3-DV-Hop(C)。文献[15]提出的锚节点部署方式:将正方形区域划分为m个大小相同的小正方形,每个小正方形内切圆中心放置1个锚节点,其他未知节点随机分布。如图2所示,m为锚节点个数。

图2 文献[15]节点分布环境
3 MATLAB仿真结果分析
用MATLAB7.0软件,设立仿真环境在100 m× 100 m正方形二维区域,节点总数100个,锚节点覆盖率分别取4%、9%、16%、25%、36%、49%。未知节点随机分布,通信半径分别取20 m、30 m、40 m、50 m。将本文算法与DV-Hop算法、文献[11]算法、文献[12]算法对比,由于节点分布随机性,仿真100次取平均值。
定位精度(Accuracy)指网络中全部节点(N个)的平均定位误差与节点通信半径R的比值,值越小说明定位精度越高,计算如(11)式。

(xi,yi)、(x0i,y0i)分别指未知节点i的定位坐标与实际坐标。
3.1随机分布多通信半径DV-Hop算法
将锚节点与未知节点随机分布,仿真本文2-DV-Hop(A)算法、3-DV-Hop(A)算法和DV-Hop算法、文献[11]双通信半径算法、文献[12]三通信半径算法。如图3所示,2-DV-Hop(A)算法比文献[11]双通信半径算法占优势,通信半径30 m,锚节点覆盖率9%时,能提高定位精度1.23%。3-DV-Hop(A)算法比文献[12]三通信半径算法占优势,通信半径30 m,锚节点覆盖率 9%时,能提高定位精度1.64%。2-DV-Hop(A)算法、3-DV-Hop(A)算法分别比DV-Hop算法提高定位精度10%左右、15%左右。

图3 5种算法对比
3.2随机分布多通信半径DV-Hop算法最佳指数
在锚节点随机分布环境下,取不同的α代入式(10),仿真2-DV-Hop(B)算法和3-DV-Hop(B)算法,并与本文2-DV-Hop(A)算法和3-DV-Hop(A)算法对比,验证文献[14]最佳指数值概念对本文改进算法的有效性。通信半径分别取20 m、 30 m、40 m、50 m。以锚节点覆盖率25%为例,如图4所示,在1.9~2.0指数值范围内,存在不同的最佳指数值使2-DV-Hop(B)算法和3-DV-Hop(B)在不同的通信半径内比原2-DV-Hop(A)算法和3-DV-Hop(A)算法定位精度高,且能达到最高定位精度。

图4 4种算法对比
同理,找出其它锚节点覆盖率下使定位精度最高时的指数,即最佳指数。经研究,在不同的锚节点覆盖率和不同的通信半径R下,对应不同的最佳指数α,如表1所示,α取1.91~2.04范围。

表1 本文算法最佳指数(随机分布)
将最佳指数代入本文2-DV-Hop(B)算法、3-DV-Hop(B)算法,并与DV-Hop算法、文献[11]双通信半径算法、文献[12]三通信半径算法对比。如图5所示,在随机分布环境,最佳指数下,2-DV-Hop(B)算法比文献[11]双通信半径算法占优势,通信半径30 m,锚节点覆盖率9%时,提高定位精度1.42%。3-DV-Hop(B)算法比文献[12]三通信半径算法占优势,通信半径30 m,锚节点覆盖率9%时,提高定位精度1.89%。2-DV-Hop(B)算法、3-DV-Hop(B)算法分别比DV-Hop算法提高定位精度11%左右、15%左右。
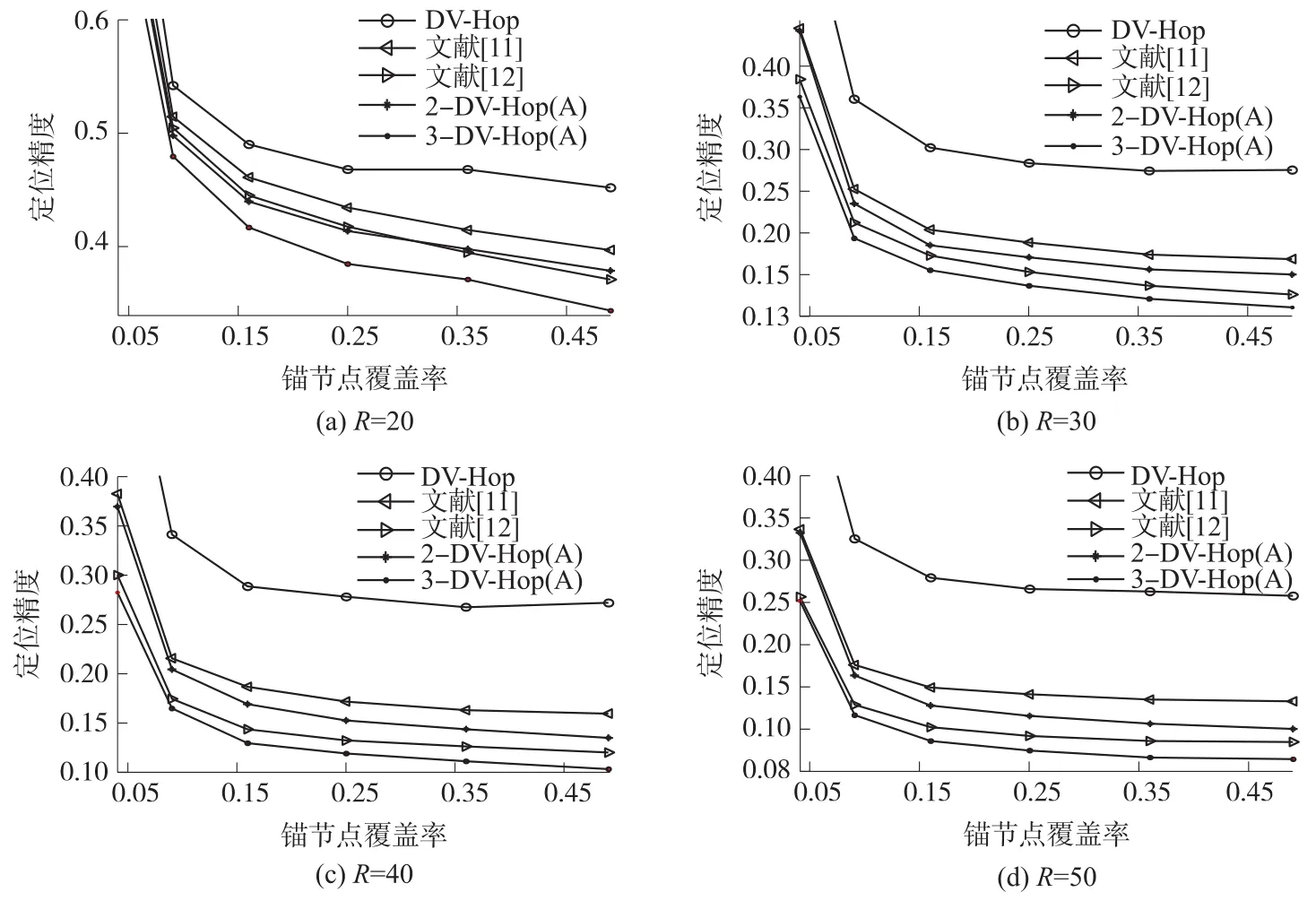
图5 五种算法对比
3.3本文算法在文献[15]环境中应用
按照文献[15]提出的锚节点部署方式,仿真本文算法2-DV-Hop(C)、3-DV-Hop(C),求最佳指数α。如表2,最佳指数α取1.89~2.40范围。

表2 本文算法最佳指数(文献[15]环境)
将最佳指数代入本文2-DV-Hop(B)算法、3-DV-Hop(B)算法,并与DV-Hop算法、文献[11]双通信半径算法、文献[12]三通信半径算法对比。如图6所示,在锚节点均匀部署环境,最佳指数下,2-DV-Hop(C)算法比文献[11]双通信半径算法占优势,通信半径30 m,锚节点覆盖率9%时,提高定位精度6.26%。3-DV-Hop(C)算法比文献[12]三通信半径算法占优势,通信半径30 m,锚节点覆盖率9%时,提高定位精度5.52%。2-DV-Hop(C)算法、3-DV-Hop(C)算法分别比DV-Hop算法提高定位精度16%左右、19%左右。

图6 五种算法对比
4 结语
首先分析了DV-Hop算法定位误差来源,陈述了基于2、3通信半径DV-Hop定位算法及其不足。然后,改进基于2、3通信半径的DV-Hop算法,在锚节点覆盖率9%,通信半径30 m时,比DV-Hop算法分别提高定位精度9.9%、15%。结合并改进最小均方差准则下求平均每跳距离的公式,在最佳指数下,本文算法进一步提高定位精度,在锚节点覆盖率9%,通信半径30 m时,比DV-Hop算法分别提高定位精度11.3%、15.3%。最后,将算法应用在锚节点人工部署未知节点随机分布环境中,大大提高了定位精度。在锚节点覆盖率9%,通信半径30 m时,又分别提高了定位精度16.2%、19.1%。
[1] Hadir A,Zine-Dine K,Bakhouya M,et al.An Optimized DV-Hop Localization Algorithm Using Average Hop Weighted Mean in WSNs[C]//Codes,Cryptography and Communication Systems (WCCCS),2014 5th Workshop on,IEEE,Nov.2014:25-29.
[2] Qingjiang Shi,Chen He,Hongyang Chen,et al.Distributed Wireless Sensor Network Localization Via Sequential Greedy Optimization Algorithm[J].IEEE Transactions on Signal Processing,2010,58(6):3328-3340.
[3] Zhang R,Ingelrest F,Barrenetxea G,et al.The Beauty of the Commons:Optimal Load Sharing by Base Station Hopping in Wireless Sensor Networks[J].IEEE Journal on Selected Areas in Communications,2015,33(8):1480-1491;
[4] Hadir A,Zine-Dine K,Bakhouya M,et al.An Improved DV-Hop Localization Algorithm for Wireless Sensor Networks[C]//Next Generation Networks and Services(NGNS),2014 Fifth International Conference on.IEEE,May2014:330-334.
[5] Bang Wang,Guang Wu,Shu Wang,et al.Localization Based on Adaptive Regulated Neighborhood Distance for Wireless Sensor Networks with a General Radio Propagation Model[J].IEEE.Sensors Journal,2014,14(11):3754-3762.
[6] Dai Ying,Wang Jianping,Chongwei Zhang.Improvement of DVHop Localization Algorithms for Wireless Sensor Networks[C]// Wireless Communications Networking and Mobile Computing (WiCOM),2010 6th International Conference on IEEE,Sept 2010:1-4.
[7] 夏少波,朱晓丽,邹建梅.基于跳数修正的DV-Hop改进算法[J].传感技术学报,2015,28(5):757-762. XIA Shaobo,ZHU Xiaoli,ZO U Jiaumei.The Improved DV-Hop Algorithm Based on Hop Count[J].Chinese Journal of Sensors and Actuators,2015,28(5):757-762.
[8] 江禹生,冯砚毫,管芳,等.无线传感网非测距三维节点定位算法[J].西安电子科技大学学报(自然科学版),2012,39(5): 140-147. JIANG Yusheng,FENG Yanhao,GUAN Fang,et al.Range-Free Three-Dimensional Node Location Algorithm for the Wireless SensorNetwork[J].JournalofXidianUniversity,2012,39(5):140-147.
[9] 周正.无线传感器网络的节点自定位技术[J].中兴通信技术,2005,11(4):51-56. ZHOU Z.Self-Localization Technologies for Wireless Sensor Network Nodes[J].ZTE Communications,2005,11(4):51-56.
[10]王翥,郝晓强,王玲.基于锚节点选择的无线传感器网络定位算法[J].计算机研究与应用,2010,47(S):31-34. Wang Zhu,Hao Xiaoqiang,Wang Ling.Choice of Location-Based Anchor Node Localization Algorithmfor Wireless Sensor Networks[J].Journal of Computer Research and Development,2010,47(S):31-34.
[11]李娟,刘禹,钱志鸿.于双通信半径的传感器网DV-Hop定位算法[J].吉林大学学报(工学版),2014,44(2):502-507. LI Juan,LIU Yu,QIAN Zhihong,et al.Improved DV-Hop Localization Algorithm Based on Two Communication Ranges for Wireless Sensor Network[J].Journal of Jilin University(Engineering and Technology Edition),2014,44(2):502-507.
[12]黄炎炎,陈向东,倪进权,等.改进的DV-Hop无线传感器网络定位算法[J].通信技术,2014,47(7):765-769. HUANG Y Y,CHEN X D,NI J Q,et al.An Improved DV-Hop Localization Algorithm for Wireless Sensor Networks[J].Communications Technology,2014,47(7):765-769.
[13]刘士兴,黄俊杰,刘宏银,等.基于多通信半径的加权DV-Hop定位算法[J].传感技术学报,2015,28(6):883-887. LIU S X,HUANG J J,LIU H Y,et al.An Improving DV-Hop Algorithm Based on Multi Communication Radius[J].Chinese Journal of Sensors and Actuators,2015,28(6) :883-887.
[14]马淑丽,赵建平.无线传感器网络中DV-Hop定位算法的改进[J].通信技术,2015,48(7):840-844. MA S L,ZHAO J P,ZHANG B T.The Improvement of DV-Hop Algorithm in Wirless Sensor Networks[J].Communications Technology,2015,48(7):840-844.
[15]马淑丽,赵建平,张炳婷,等.WSN中节点定位方法的改进[J].通信技术,2015,48(4):453-457. MA S L,ZHAO J P,ZHANG B T,et al.Improvement of Node Locating Algorithm in WSN[J].Communications Technology,2015,48(4):453-457;
[16]Zhou H,Xia S,Jin M,et al.Localized and Precise Boundary Detection in 3-D Wireless Sensor Networks[J].IEEE/ACM Transactions on Networking,2014(99):1-1.
[17]MaungNAM,KawaiM.ExperimentalEvaluationsofRSSThreshold-Based Optimised DV-HOP Localisation for Wireless Ad-Hoc Networks[J].IET,Electronics Letters,2014,50(17):1246-1248.
[18]魏全瑞,刘俊,韩九强.改进的无线传感器网络无偏距离估计与节点定位算法[J].西安交通大学学报,2014,48(6):1-6. WEI Quanrui,LIU Jun,HAN Jiuqiang.An Improved DV-Hop Node Localization Algorithm Based on Unbiased Estimation for Wireless Sensor Networks[J].Journal of Xi'an Jiaotong University,2014,48(6):1-6.
[19]嵇玮玮,刘中.定位算法在随机传感器网络中的应用研究[J].电子与信息学报,2008,30(4):970-974. Ji Weiwei,Liu Zhong.Study on the Application of DY-Hop Localization Algorithms to Random Sensor Networks[J].Journal of Electronics&Information Technology,2008,30(4):970-974.
[20]宫娜娜,武海艳.传感器网络节点分布均匀性与定位性能的关系[J].电子测量技术,2014,37(12):80-85. GONG N N,WU H Y.The Relationship between the Sensor Network Node Distribution Uniformity and Positioning Performance [J].Electronic Measurement Technology,2014,37(12):80-85.
[21]Yousi Zheng,Lei Wan,Zhi Sun,et al.A Long Range DV-Hop Localization Algorithm with Placement Strategy in Wireless Sensor Networks[C]//Wirless Communications,Networking and Mobile Computing,WiCOM 4th International Conference on[s.l.]: IEEE,2008:1-5.
马淑丽(1989-),女,硕士研究生,主要研究方向为无线传感器网络、无线通信技术,marrymiffy@sohu.com;

赵建平(1964-),男,教授,主要研究方向为无线通信技术。
Multi Communication Ranges DVHop Localization Algorithm for Wireless Sensor Network*
MA Shuli,ZHAO Jianping*
(College of Physics Engineering,Qufu Normal University,Qufu Shandong 273165,China)
In order to realize high precision positioning of DV-Hop localization algorithm based on rang-free in wireless sensor network,this paper improved the DV-Hop localization algorithm based on 2 or 3 communication radius,and improved the average per hop distance by the least mean square error criterion.The anchor node average per hop distance is repaired in the best index value.MATLAB simulation results show that the improved algorithm can improve the localization accuracy in randomly distributed environment,further enhance the localization accuracy in the best index,and greatly improve localization accuracy in the anchor node deploying artificial environment.The improved algorithm can achieve high precision positioning without increasing the number of flood and the cost in the network.
wireless sensor network;node localization;dv-hop;least mean square error criterion;nodes distribution
TP393
A
1004-1699(2016)04-0593-08
项目来源:国家自然科学基金项目(11302118);山东省自然科学基金项目(ZR2014FM011);山东省高等学校科技计划项目(J12LN08)
2015-10-09修改日期:2016-01-15
