一种基于虚拟视景的综合船桥模拟试验系统设计
2016-10-13王静绮
王静绮 ,胡 锴
一种基于虚拟视景的综合船桥模拟试验系统设计
王静绮 ,胡 锴
(中国舰船研究设计中心,武汉 430064)
将综合船桥系统硬件设备与传统具有物理真实感的船舶操纵模拟器进行有机结合,组建综合船桥系统的陆上检测测试评估平台成为船舶操纵模拟器新的发展思路。以自主研发的综合船桥系统为目标组建虚拟视景模拟试验系统,实现了综合船桥系统与虚拟视景模拟试验系统的互联互动互操作,经验证,该系统能够实现综合船桥系统陆上检测调试功能。相比原有的实船测试方式能够有效的缩短系统研发周期,减少设备研制风险。
综合船桥系统 虚拟视景 模拟试验系统
0 引言
综合船桥虚拟视景模拟试验系统是一种以先进综合船桥技术为基础,结合船舶操纵模拟器相关技术,将各种船用导航、通信、操纵和控制等设备进行有机结合,并运用计算机、现代控制、信息融合处理、虚拟现实和船舶水动力学等技术实现的基于真实船桥设备的航海过程半物理仿真系统。
以本单位自主研发的综合船桥系统为对象,提出了一套半物理虚拟视景模拟试验系统的组建方案,本试验系统能够实现物理的综合船桥设备在虚拟的环境中联动,同时能够部分代替综合船桥设备的实船测试。经实际验证,能够缩短综合船桥系统的开发周期,减少设备的开发成本。
1 系统组成
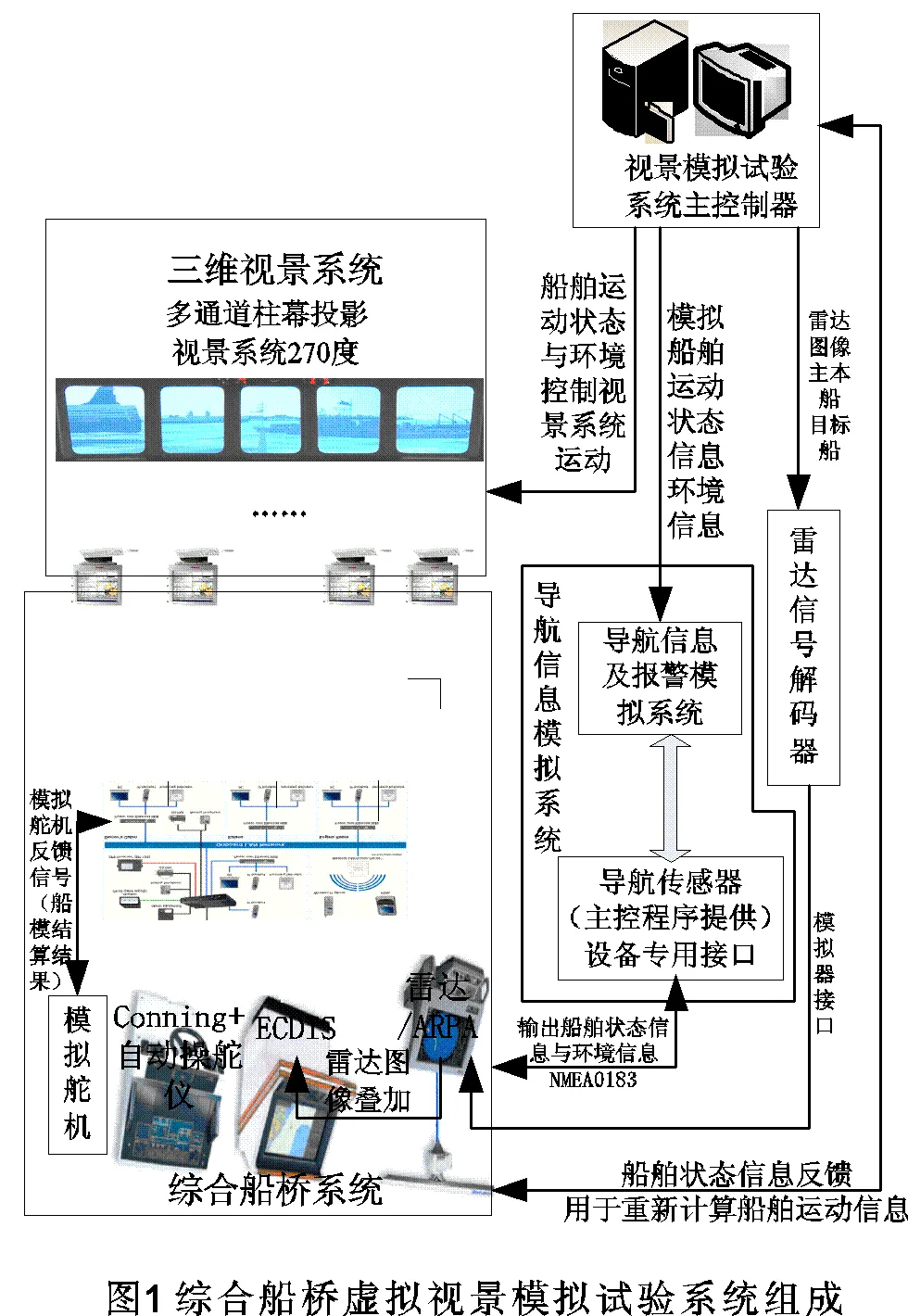
综合船桥虚拟视景模拟试验系统主要由三维视景系统、视景模拟试验系统主控制器、网络管理系统、导航信息模拟系统、雷达信号解码器、综合船桥系统等组成,如图1[1]所示。
1.1三维视景系统
三维视景系统主要由三维场景模型库构建、海洋环境模拟和三维渲染组成,主要用于提供船舶虚拟航行的可视环境,是人机交流的桥梁、各种信息流交互和表达的平台,主要负责视景中的各种设备和特殊现象的真实感模拟仿真和管理。
本系统为综合船桥设备提供虚拟操作环境,使得真实的综合船桥设备能够在虚拟的环境场中运动,从而实现基于船桥系统的船舶运动半物理仿真。三维视景[2]选择国内典型港口,通过实地测量和摄影摄像,结合电子海图数据,利用建模工具建立相关港口的可显示具有丰富纹理的天空、水面、白浪、太阳(日出日落)、月亮、下雨、云层、雾、物标船、浮标浮筒、缆桩缆绳、建筑物、桥梁、山脉、其他岸上景观、水面反光等内容的水域三维模型。
系统输入:位置(经度,纬度)、船舶吃水深度、速度V、运行方向(V_x, V_y)、舵角船舶侧滚角、船舶俯仰角、波浪类型、风力级数、风向、天气、时间等。
系统输出:视景图像、反馈力、输出所受力大小、输出所受力的方向等。
1.2视景模拟试验系统主控制器
视景模拟试验系统主控制器作为仿真系统的主控单元,是整个仿真系统的核心,可以用它创建、保存、运行、监视、存储、修改和重放各种船舶航行模拟。
1.3网络管理系统
网络管理系统负责模拟试验系统网络的配置以及各PC机运行船台监视与远程操作等。本系统配置市购成熟网管软件。
1.4导航信息模拟系统
导航信息模拟系统可模拟生成各类导航传感器[3](GPS、罗经、计程仪等)的数据信息,通过预定义接口形式向船舶及时发布航行参数(航向、位置、速度、转弯半径等);模拟船舶各种航行状态,产生导航传感器各类状态报警信息。
1.5雷达信号解码器
雷达信号解码器主要完成从模拟试验系统中接收雷达回波信号模拟器所传来的模拟图像信息、船艏信号、触发信号和同步信号,接收ARPA目标模拟器所传来的目标船的方位、航向、速度、转向速率等信息,根据自研综合船桥系统要求进行数据转换,通过自研综合船桥系统提供的接口电路要求输入到自研综合船桥系统雷达里面,驱动雷达工作。
1.6综合船桥系统
本系统综合船桥系统采用本单位自主研发综合船桥系统实船配套设备。
2船舶运动模型
虚拟视景模拟试验系统主控制器作为仿真系统的主控单元,是整个仿真系统的核心,可以用它创建、保存、运行、监视、存储、修改和重放各种船舶航行模拟。试验人员可通过主控制器实现本船模拟,并实施船舶运动控制。
作为主控制器的核心,船舶运动控制系统主要用来实现船舶的航向控制和航迹控制功能,并基于组建的船舶运动模型[4-6],将其转化为标准的状态空间形式,采用传统的比例-微分-积分控制算法来实现,控制变量时舵角和螺旋桨转速,输出是航向和水平面上的位置。
由于在实际环境中的船舶运动相当复杂,考虑到模拟试验系统主要用于完成真实综合船桥系统设备的联合调试及功能测试,本系统船舶运动模型仅考虑四自由度的运动。
假定船舶操纵运动分析采用三种坐标系来描述[7],如图2所示。其中,O-X0Y0Z0是固定在地球表面的惯性坐标系,其OX0轴指向正北,OY0轴指向正东,OZ0轴指向地心;G-xyz为船体坐标系,固定在船体重心处,随着船体的运动而运动,其Ox轴指向船首, Oy轴指向右舷,Oz轴指向船体下方;G-x’y’z’也是固定在船体重心处,但是G-x’y’平面与O-X0Y0平面保持平行,用以描述船体运动。θ、、ψ分别为纵向、横向和垂向的姿态角。
基于分离模型(MMG)的思想分别计算力和力矩,推导得到船舶四自由度动力学方程为(1)(2)式。
(1)、(2)式中:X、Y、K、与N为船体在相应的四自由度方向上的力和力矩;下标为P、R、F的变量分别为螺旋桨、舵和鳍的力与力矩;下标为wind、wave与current的变量分别为风、浪、流的力与力矩;为船舶质量;m、m分别为纵向、横向船舶的附加质量;I、I、分别为绕Ox、Oz轴的转动惯量;J、J分别为绕Ox、Oz轴的附加转动惯量;分别为纵向、横向的速度及绕Ox、Oy轴的角速度,x、y分别为纵向、横向的坐标。在本系统中,只考虑浪力的影响,其它因素如风、流等于此类似,对上述四自由度方程进行变换,获得分别以四个自由度位置坐标为因变量的二阶微分方程组,如(2)式。
船体各个方向上的附加质量可以用相应的经验公式来计算,可以表达为船体外形尺度的函数,因此对于某个固定的船,附加质量是常数。船体所受到的流体力可以用贵岛模型来计算,或者用根据元良图谱总结的周昭明公式来计算,这些经验公式的区别在于模拟的精度,但都把上式右端的船体力展成船舶四个自由度上的位置坐标的多项式函数,为了研究高海况下船舶的吸波减摇运动控制,需要考虑非线性流体动力,因此需要把流体动力项展开到二阶,不失一般性,不影响要研究的问题的本质,此次不一一列举上述流体动力项公式。 螺旋桨的推力可以用下述一组公式描述:
而舵引起的水动力可以用如下一组公式描述:
其中,F为舵法向力,为舵角,α, x为舵与船体的水动力影响系数, x, z为舵的纵向和垂向坐标,A,V为舵面积和舵处的来流速度,C(λ,α)为舵的法向力系数,其中,λ为舵的展舷比,α为来流攻角,其具体形式由实验确定。
鳍的水动力由以下公式确定:
其中A为鳍的投影面积、C为鳍的升力系数斜率、α为减摇鳍控制系统作用下的转动鳍角、l为鳍中心至船重心的长度、β为鳍的法线与水平面的夹角、l为鳍的升力作用线到重心的距离在OX轴上的投影。
技术方案:基于Matlab的动态库文件,嵌入到系统总控程序。
系统输入:船舶线形参数,如两柱间长、宽、吃水、排水量等,舵的形状参数,螺旋桨的形状参数,外界扰动的数据,如风况、浪级、流的大小和方向等。
系统输出:船舶四自由度的实时位移和速度。
3 设备安装与场地设计
本虚拟视景模拟试验系统采用高亮度DLP投影仪、柱形屏幕以及数字几何校正和边缘融合软件,使投影画面做到无缝拼接和高亮度显示。安置房间大于12 m×10 m空间,挑高4 m。仿真模拟舱室将综合船桥系统放置其中,舱室铺设防静电地板,电缆从地板下部走线,其他位置由线槽走线,投影仪悬挂安装。供电电源位置由实际搭建情况协调。
投影仪的投影面为柱面环幕投射,屏幕为一个连贯的圆弧形,最佳观察点在圆弧的圆心位置,从这个位置来观察图像,将获得一个大视角、图像无变形的完美效果,仿佛身临其境[8]。该环幕方式为高端视景仿真系统的首选。该投影方式的优点为:1)幕与幕之间的拼接处无痕迹;2)画面和色彩连贯、幕与幕之间无几何变形;3)观众沉浸感较强。
依据本系统的使用需求和场地情况,模拟试验室采用5台高亮度DLP投影机,显示5通道180°水平视场角的大屏幕视景系统。
4 结束语
以本单位自主研发综合船桥系统为对象,结合实际使用需求,提出了一套半物理虚拟视景模拟试验系统的组建方案。经实际试验验证[9],该系统能够实现真实的综合船桥设备在虚拟的仿真试验环境中联动,能够部分替代综合船桥设备的实船测试[10],达到了缩短综合船桥系统的开发周期,减少设备开发成本的目的。
[1] 张安阳.航海模拟器在IBS研发过程中作用的研究与实践[D].大连:大连海事大学,2011:4-5.
[2] 陈立家,黄立文.基于CAN总线的综合船桥模拟实验系统的设计[J].武汉理工大学学报(交通科学与工程版),2011,35(1):109-112.
[3] 赵玉新,刘利强,李刚.基于虚拟现实的综合舰桥仿真系统设计[J].系统仿真学报,2006,18(2),650-653.
[4] 任俊生,杨盐生. 静水中高速水翼双体船运动建模和仿真[J]. 大连海事大学学报,2002,28(2),18-21.
[5] 韩晓光,吴晞,郑环宇. 波浪对穿浪双体船摇荡运动的影响[J].舰船科学技术,2012,34(4),13-16.
[6] 王五桂.穿浪双体船纵向运动控制系统试验水池样机方案设计[J]. 船电技术,2014,34(6),39-42.
[7] 陈立家,黄村娥,曾伟伟,等. 基于电子海图的船舶避碰技术的研究[J]. 武汉理工大学学报(交通科学与工程版),2013,37(5):979-981.
[8] 黄金锋,陶伟,赵罡,李鹏. 虚拟现实技术在人机工程中的应用要求标准研究[J]. 中国舰船研究, 2008,(6):49-53,60.
Design of Integrated Bridge Simulation Experimental System Based on Virtual Visual
Wang Jingqi, Hu Kai
(China Ship Development and Design Center, Wuhan 430064, China)
U662
A
1003-4862(2016)05-0055-04
2016-01-09
王静绮(1980-),女,硕士。研究方向:舰船工程。
