脉冲直流发电机的积分分离数字PID控制技术研究
2016-10-13李志新张国友
李志新,张国友
脉冲直流发电机的积分分离数字PID控制技术研究
李志新,张国友
(海军工程大学电气工程学院,武汉 430033)
在对铁磁物质实施磁性处理时,需要主电源系统输出正负交替、幅值逐步衰减的脉冲电流,本文以设计磁性处理脉冲直流发电机控制系统为研究内容,在采用传递函数法建立主电源控制系统数学模型的基础上,针对主电源系统电流波形的特点提出了积分分离PID调节方法,并进行了参数优化。本文的研究成果已在工程实践中得到了验证和应用。
磁性处理 直流发电机 PID调节 积分分离
0 引言
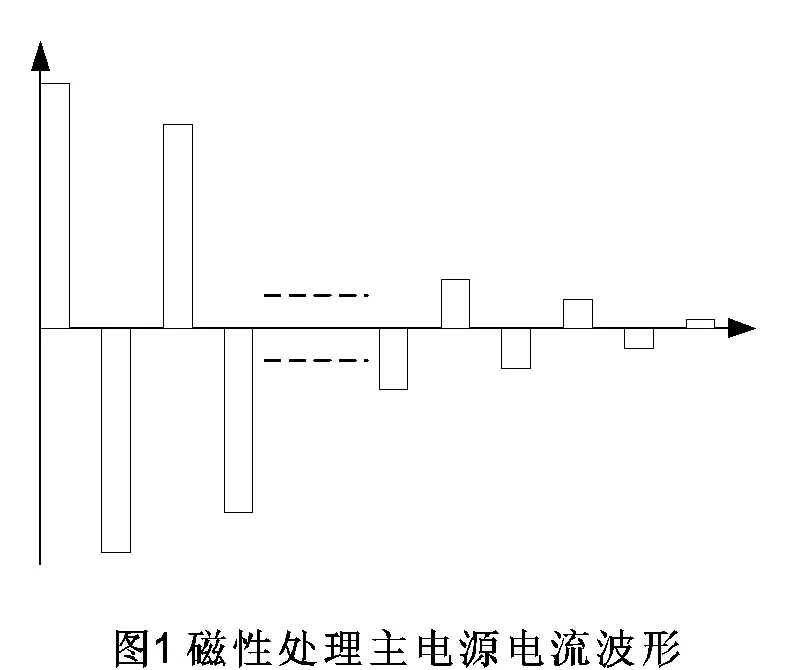
在对铁磁物质实施磁性处理时,需要在工作线圈中通以图1所示的正负交替、幅值逐步衰减的脉冲电流,在被处理的铁磁物质周围空间产生正负交替、幅值逐渐衰减的脉冲强磁场,达到消除铁磁物质固定磁场的目的[1]。首脉冲幅值达数千安培甚至更大,脉冲形状要求严格,这就对磁性处理主电源及其控制技术提出了很高的要求。磁性处理主电源系统根据其实现方式有市电整流型、直流发电机加飞轮储能型、同步发电机加飞轮储能型、同步发电机加超级电容储能型、同步电机直接晶闸管整流型等多种类型,尽管与同步发电机相比较,直流发电机换向等因素的影响,体积大、功率密度较小,但它具有良好的启动性能、宽广平滑的调速特性、控制方便等优点,所以直流发电机加飞轮储能型主电源在工程实际中得到了广泛的应用[2]。传统的直流发电机加飞轮储能型主电源,其励磁电源为电机扩大机,采用的反馈控制方法,虽能满足要求,但缺乏进一步提升的空间,也落后于控制技术的发展水平,故研究脉冲直流发电机的数字PID控制技术,为直流发电机加飞轮储能型磁性处理主电源的改造储备技术,对提升磁性处理水平有重要意义。以下本文中的主电源,均为电机扩大机励磁的直流发电机加飞轮储能型磁性处理主电源。
1 主电源电气部分模型
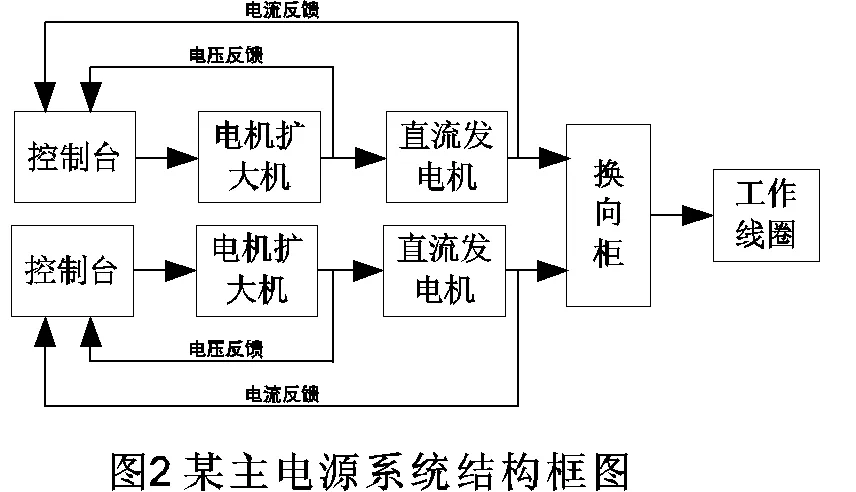
某磁性处理主电源系统结构框图如图2所示,控制台产生形状与图1波形相同的方波脉冲控制信号,经电机扩大机放大功率,给直流发电机励磁,从而控制直流发电机输出电流的大小和方向,也就是工作线圈电流的大小和方向。直流发电机输出的电流信号、电机扩大机输出的电压信号(即励磁电压)反馈至控制台。
交磁电机扩大机利用了交轴电枢反应磁场,可用一套电枢绕组实现两级放大作用。在忽略补偿绕组与补偿调节电阻所构成的回路对控制绕组的互感作用,忽略交轴换向去磁与铁耗去磁构成的等效回路与控制绕组之间的互感作用,假定过渡过程中,磁路状态保持不变的情况下,交磁电机扩大机传递函数如图3所示。
以某磁性处理主电源系统的电机扩大机、直流电机及绕组参数为基础,在仅考虑反馈控制的情况下,图2所示主电源系统的电气部分模型如图5所示,其中,假定为750r/m不变,即假设在磁性处理过程中直流电机转速为额定值。
2 积分分离数字PID控制算法
在普通的数字PID控制器中引入积分环节的目的在于消除系统的稳态误差,提高系统控制精度。但磁性处理主电源系统输出的工作电流在上升、下降阶段时由于电流值的大幅增减,使得系统偏差很大,会造成PID运算的积分积累,进而引起系统较大的超调,但如果减小PID运算的积分作用,又会导致系统稳态误差较大,系统输出精度不高,两种情况都是系统设计中不愿看到的。引进积分分离PID控制算法,能够很好的解决这一矛盾。其具体算法如下:根据系统调试实验的结果,人为设定一阀值,当,即系统偏差过大时,减小积分作用或取消积分作用,使系统的超调量减小,避免系统的振荡;当,即系统偏差较小时,加大积分作用,保证系统的调节精度。以位置式数字PID算法为例,写成积分分离形式即为[3]:
其中的值根据系统调试的结果设定,以决定PID控制中积分作用的大小。
3 积分分离数字PID控制算法的仿真建模
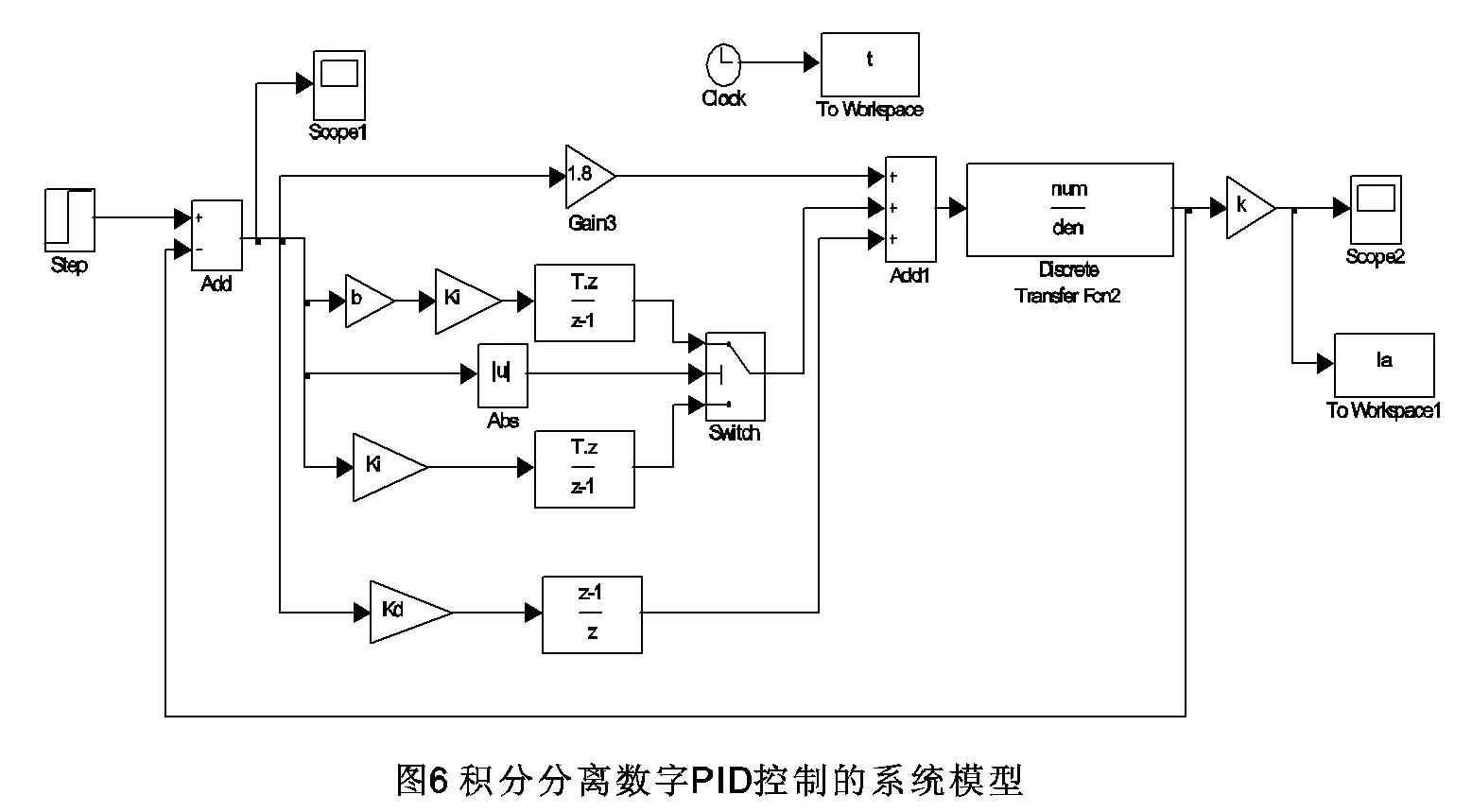
依据离散PID控制模型,对控制系统传递函数采用Z变换进行离散化,选取采样时间为3 ms,建立离散的系统模型见图6所示,模型中的T即根据系统时间常数选择的信号采样时间。“Transfer Fcn2”为参数优化后的系统模型,优化过程参考文献[3]。
4 积分分离数字PI控制器的参数优化
不断调整参数,以最快上升时间为目标反复优化整定[10,11]得系统阶跃响应如图8(c) 所示,超调量、上升时间、调节时间,此时控制器比例、积分参数为=3.5、=8.0,阀值为=0.4,系数为b=0.1。与普通PI调节相比,积分分离PI调节有一定的优越性。
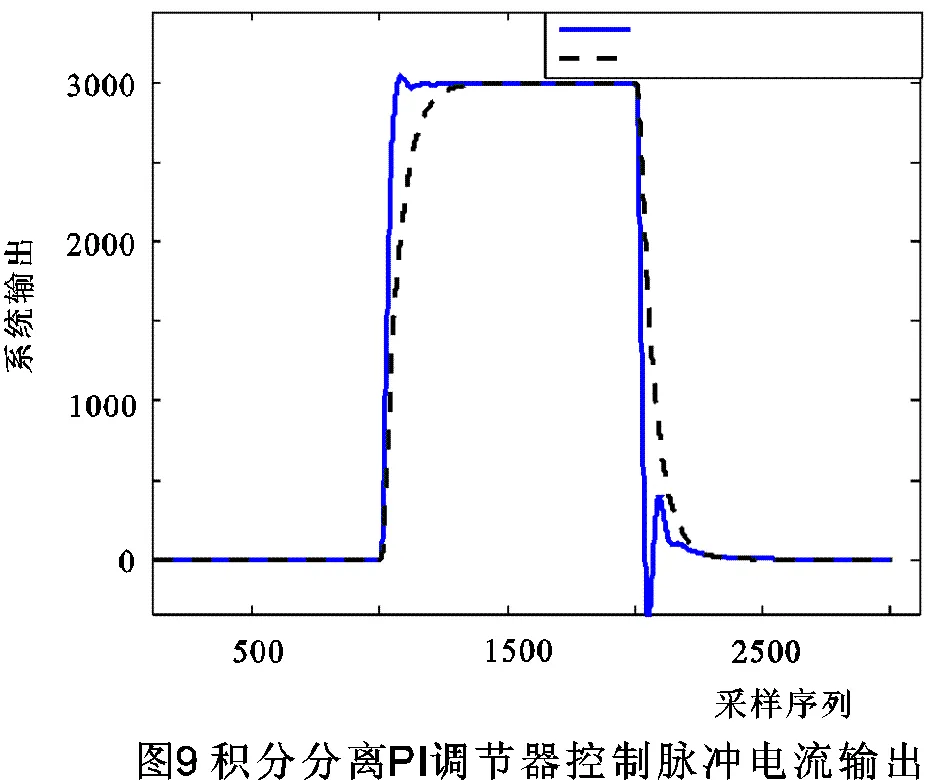
积分分离PI调节器控制脉冲输出仿真如图9所示,与不加PID调节器时相比,上升快、调节时间短,也带来了一定的超调量,下降阶段甚至有振荡,但磁性处理主电源电流下降时有自关断功能,该振荡不影响工作。
5 积分分离数字PID控制器的参数优化
采用积分分离数字PID控制需要设定的参数较多,但最具影响力的还是比例、积分、微分参数。在前面PI参数调节的基础上,制器比例、积分参数为=3.5、=8.0,阀值为=0.4,系数为b=0.1不变,取=31(T=3 ms),得单位阶跃响应如图10(a)所示,系统响应变慢。曾大比例系数,取=5.0,得系统单位阶跃响应如图10(b)所示,达到稳定输出之前,输出值大多数时间小于稳定值,系统积分作用不够。增大积分系数,取=12.5,得单位阶跃响应如图10(c)所示,改善了积分问题。如此反复调节整定,得系统积分分离数字PID控制器最优参数,其单位阶跃响应如图10(d)所示,超调量、上升时间、调节时间,此时控制器比例、积分、微分参数为=5.0、=12.5、,阀值为=0.4,系数为b=0.1。
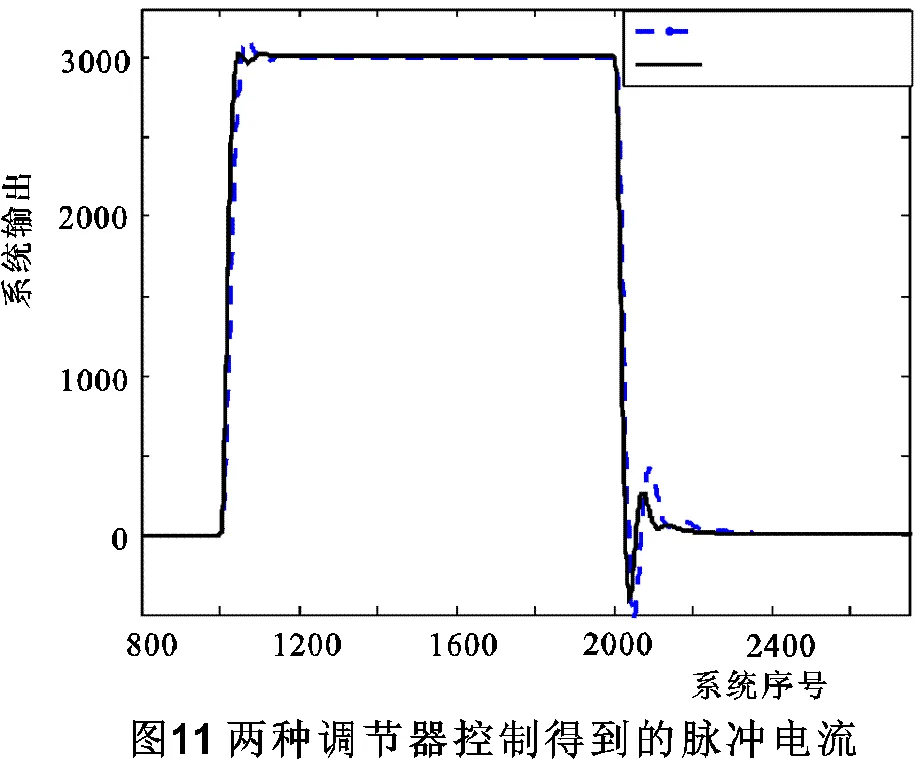
积分分离数字PID调节器控制脉冲电流输出仿真如图11所示,与积分分离数字PI调节器时相比,响应快、超调量小、调节时间短。采用积分分离数字PID调节可获得满意的脉冲电流波形。
5 小结
本文首先采用传递函数法建立基于直流发电机的磁性处理主电源系统数学模型,并针对磁性处理脉冲电流的特点,提出了采用积分分离数字PID控制技术控制主电源的输出,然后通过仿真、比较、分析,证实了积分分离数字PID调节技术控制主电源输出的优越性。基于PLC的积分分离数字PID调节技术应用于主电源系统的改造,取得了很好的效果。
[1] 肖昌汉. 铁磁学[M]. 北京: 海潮出版社, 1999, 124:189-200.
[2] 何明. 舰船消磁控制系统原理与设计[M]. 武汉: 海军工程大学,2006: 1-58.
[3] 郭小程. 消磁直流脉冲发电机控制系统的仿真与设计[D]. 武汉:海军工程大学图书馆,2008.
[4] 本溪微型电机厂等. 交磁电机扩大机[M]. 北京:科学出版社, 1979,21: 104-119.
[5] 辜承林, 陈乔夫, 熊永前. 电机学[M]. 武汉: 华中科技大学出版社, 2001: 39-110.
[6] 尉冰娟, 王明渝, 张淑国. 基于MATLAB的感应电机矢量控制系统的仿真[J]. 计算机仿真, 2006, 23(4): 326-329.
[7] 盛义发, 洪镇南. MATLAB在电力系统仿真中的应用[J]. 计算机仿真, 2004, 21(11): 197-199.
[8] 纪志成,沈艳霞,姜建国. 基于MATLAB无刷直流电机系统仿真建模的新方法[J]. 系统仿真学报, 2003, 15(12): 1745-1749.
[9] 黄忠霖. 自动控制原理的MATLAB实现[M]. 北京: 国防工业出版社, 2007, 198:316-360.
[10] 陶永华. 新型PID控制理论与自整定技术[C]. 全国首届先进控制与优化研讨会论文集. 合肥:中国科学技术大学出版社, 1999: 60-63.
[11] 汪洋, 褚键. 一种基于递推参数估计的PID参数自整定方法[J]. 信息与控制, 1996, (3): 182-185.
Research on Integral separation Digital PID Control Technology of Pulse DC Dynamo for Deperming
Li Zhixin, Zhang Guoyou
(College of Electrical Engineering, Naval University of Engineering, Wuhan 430033, China)
TM46
A
1003-4862(2016)05-0046-05
2016-01-09
李志新(1981-),男,硕士。研究方向:舰船消磁。
