无源多基地雷达中一种综合航迹处理方法
2016-10-13吕小永乔家辉
吕小永,王 俊,乔家辉
(西安电子科技大学雷达信号处理国家重点实验室,陕西西安710071)
无源多基地雷达中一种综合航迹处理方法
吕小永,王 俊,乔家辉
(西安电子科技大学雷达信号处理国家重点实验室,陕西西安710071)
本文对基于调频广播信号的无源多基地雷达系统中的目标跟踪问题进行了研究,提出了一种综合航迹处理方法.本文将航迹划分为四种状态,即起始航迹,试验航迹,确认航迹,以及消亡航迹,详细介绍了每一种航迹的处理方式.本文顺序地利用每个接收-发射对的观测量来更新航迹,以减小算法复杂度.仿真实验与实测数据结果证明了本文算法的有效性.
无源多基地雷达;调频广播信号;目标跟踪;航迹处理
1 引言
近年来无源雷达系统引起了国内外研究人员的广泛关注.无源雷达本身不发射电磁波,而是利用空间中已有的民用信号作为机会照射源来检测目标[1],具有很多优点,首先无源雷达不占用额外的频段,其次无源雷达本身具有隐身性,另外无源雷达也具有探测隐身目标的潜力.在可用的机会照射源中,调频广播(FM)信号具有近似理想的模糊函数,信号的覆盖范围广泛,因此国内许多外学者对基于FM信号的无源雷达系统进行了大量的研究,取得了许多有益的成果[2].
基于FM信号的无源雷达中,我们可以利用一个调频广播发射站和一个无源雷达接收机(无源双基地雷达)来对目标进行探测[3],目标的位置可以通过雷达测量得到的双基地到达时间(TOA)以及到达角(DOA)来确定.然而TOA+DOA的定位方法往往得不到精确的定位结果,定位误差很大程度受到DOA测量误差的影响,而在FM信号的波段,目标的DOA很难精确测量得到[4].我们也可以利用多个发射站和一个接收站(无源多基地雷达)来对目标进行探测,利用目标的对应于多个收发对(receiver-transmitter pair)的TOA来对目标进行定位[5].基于TOA的定位方法往往能够得到精确的定位结果,因为该方法的定位精度对TOA的测量精度相对不敏感,而基于FM信号的无源雷达的TOA测量精度相对较高.
目标跟踪在无源雷达中扮演重要的角色,因为无源雷达虚警率通常很高,需要经过后期的航迹处理来去除虚警.无源多基地雷达系统中的目标跟踪问题,是一个典型的多传感器多目标跟踪问题.多传感器多目标跟踪是近年来国内外学者研究的热点,许多算法被提出,最典型的两种多目标跟踪算法[6,7]为多假设跟踪方法(MHT)以及联合概率数据关联算法 (JPDA),许多多目标跟踪算法都是这两种算法的变种.多传感器多目标跟踪问题也可以通过随机优化的方法进行求解,这方面典型的有文献[8,9].文献[8]的缺点是该算法是一种局部搜索算法,文献[9]的主要缺点是算法计算复杂度大,尤其对于多传感器的情况.此外文献[10]提出了一种基于FM信号的无源雷达中概率假设密度(PHD)跟踪方法,该方法的主要缺点是PHD的粒子实现需要消耗大量的计算资源.
本文对基于FM信号的无源多基地雷达系统中的目标跟踪问题进行了研究,提出了一种综合航迹处理方法.我们将每条航迹划分为四种状态,即起始航迹,试验航迹,确认航迹,消亡航迹,详细介绍了每种航迹的处理方式以及设计了航迹从一个状态转化到另外一个状态的规则.文中我们采用序贯处理方式,顺序地利用每个收发对的观测量来更新目标航迹,从而大大减小了算法复杂度.
2 目标运动模型与观测模型

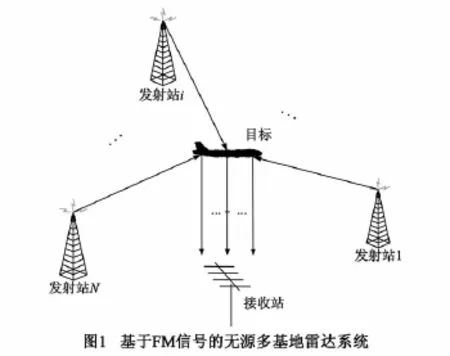
考虑如图1所示的无源多基地雷达系统,采用N 个FM发射站和一个接收机来对目标进行探测,发射站和接收站分布在空间中不同的位置,N个发射站发射不同频率的FM信号,这些信号经过目标反射后被接收机接收.在接收机中,首先通过一组带通滤波器将对应于不同发射站的目标回波分离出来,然后分别对这些回波信号进行杂波相消与距离多普勒处理,得到目标对应于不同收发对的双基地距离和与多普勒频率.
目标观测量的模型为:


λj为发射站j所发射信号的波长为发射站j的位置为接收站的位置.
无源多基地雷达系统在获取目标观测量的同时,不可避免地也会得到杂波即虚假观测量,我们将这些观测量收集起来就得到了收发对j的观测量模型:

其中yj,k为收发对j在k时刻的观测量集合为杂波集合,K为目标的个数,其大小先验未知.值得注意的是,有些目标在k时刻可能没有被收发对j检测到,此时相应的符号应该从yj,k中去除.
3 综合航迹处理方法
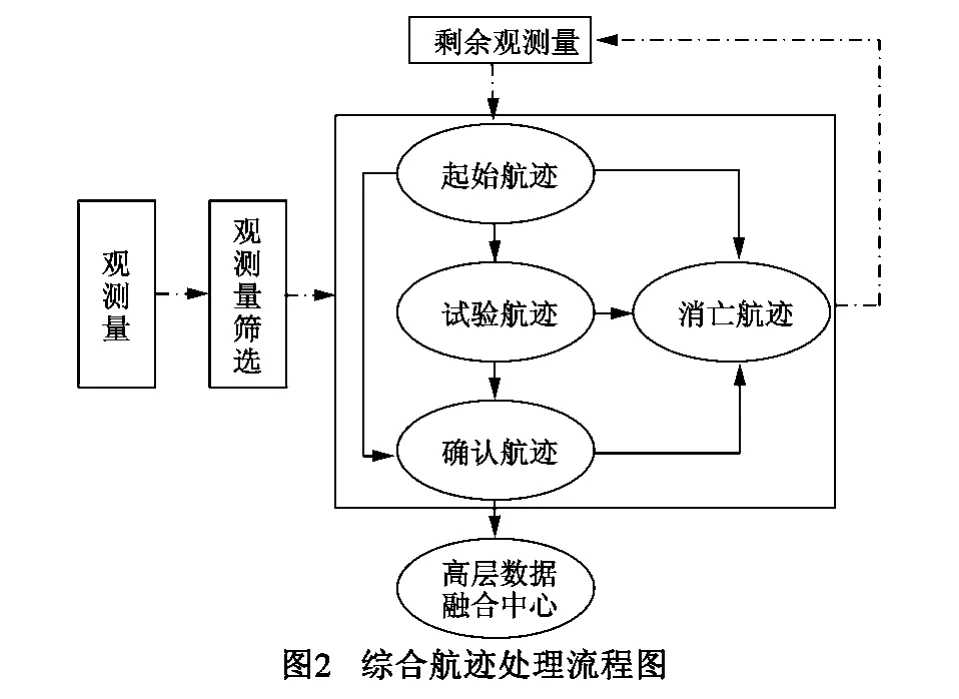
由第2节的分析可知,无源多基地雷达系统中的目标跟踪问题是一个典型的多传感器多目标跟踪问题,这里我们介绍一种面向航迹(track-oriented)的多传感器多目标跟踪方法.我们将航迹划分为四种状态,即起始航迹,试验航迹,确认航迹以及消亡航迹.航迹置信度的大小为,起始航迹<试验航迹<确认航迹,只有确认航迹被传送到更高层的数据融合中心进行处理.这种划分的好处是我们可以采用不同的航迹处理方法来处理不同类型的航迹.图2为本文综合航迹处理方法的流程,下面围绕图2来介绍该方法.
3.1观测量的筛选
无源多基地雷达系统虚警率通常很高,雷达得到的观测量中含有许多杂波,杂波不能用于目标航迹的更新,因此在航迹更新之前,首先要对观测量进行筛选.我们给每条航迹设定一个波门,落入波门内的观测量才能用于更新航迹.
设{y1,k(i1),…,yN,k(iN)}为来自不同收发对的观测量的一个任意组合,其中0≤ij≤|yj,k|,|yj,k|为收发对j的观测量的个数,ij=0表示收发对j没有检测到目标.如果观测量组合{y1,k(i1),…,yN,k(iN)}满足:


因此式(7)可以转化为:

式(9)所示的观测量筛选方法需要对不同收发对的观测量进行穷举组合,致使计算量太大.
为了减小观测量筛选过程的计算量,我们提出一种近似的筛选方法,顺序地对每个收发对的观测量进行筛选,即如果,则认为yj,k(i1)落入航迹τ的波门内.我们用来表示收发对j的落入航迹τ波门内的观测量集合,即:

用 zj,k来表示收发对j落入航迹波门内的所有观测量的集合,即为航迹个数.我们总可以选择合适的Gj,j=1,2,…,N来得到与式(9)近似的筛选结果,然而顺序筛选过程不需要对不同收发对的观测量进行穷举组合,大大降低了计算量.
3.2起始航迹
由于起始航迹表示真实目标航迹的置信度比较低,因此我们可以采用相对简化的航迹处理方法来处理起始航迹,最近邻数据关联方法,以在航迹精度与算法复杂度之间取得平衡.多传感器最近邻数据关联方法的基本思想是,首先通过求解式(11)所示的优化问题来确定最优的观测量组合,然后利用该组合对航迹τ进行更新.

将式(8)代入式(11)可得:
式(12)可以进一步化为:
式(13)将式(11)所示的联合最优化问题转化为几个独立的优化问题,大大降低了计算量.我们可以根据式(13),顺序地确定每个收发对的最优观测量,然后将最优观测量组合起来,用于更新航迹.式(13)中航迹τ在k时刻的状态未知,可以利用其预测值来替代.
3.3试验航迹与确认航迹
试验航迹与确认航迹表示真实目标航迹的置信度相对较高,因此我们采用更加高级的数据关联方法,联合概率数据关联(JPDA).多传感器JPDA分为并行算法与顺序算法两种,文献[11]在线性模型的基础上推导了顺序JPDA算法,并详细对比了两种方法的性能,指出顺序算法在计算时间与航迹跟踪精度方面都优于并行算法.本节我们采用文献[11]的基本思想,将顺序JPDA方法应用于无源多基地雷达系统中,下面介绍顺序JPDA处理流程.

图3描述了本文采用的多传感器JPDA算法的处理流程.我们首先利用第一个收发对的观测量z1,k来更新目标航迹,这是一个单传感器多目标跟踪问题,可以采用单传感器JPDA来进行处理,将得到的航迹状态估计结果记为然后结合2,…,M,利用第二个收发对的观测量z2,k来更新目标航……,依此进行下去,最后结合利用第N个传感器的观测量zN,k来更新目标航迹,得到的航迹状态估计结果记为我们将作为最终的航迹状态估计结果.上述过程将一个多传感器多目标跟踪问题拆成了几个单传感器多目标跟踪问题来进行处理,大大减小了计算量,为了进一步减小系统的计算量,我们可以采用近似算法来代替图3中的单传感器JPDA算法,比如次优JPDA算法,近似最优JPDA算法等.
3.4新航迹形成
我们利用剩余观测量来形成新的航迹,剩余观测量是指没有落入任何航迹波门内的观测量.我们用φj,k来表示收发对j的剩余观测量,构造如下观测量组合集合:

如果φu,k(iu)与φj,k(ij)来源于同一个目标,则可以通过如下方式来确定目标的初始状态:
式(15)所示的优化问题可以采用SX算法[5]进行求解.我们将求得的^xk作为新航迹的初始状态,并将该航迹标记为起始航迹.实际过程中,我们并不知道集合 ψ中的观测量组合是否来源于同一目标,为了尽可能少地丢失新目标,我们将ψ中所有组合代入(15)中,将计算得到的每一个状态估计值作为一条新航迹的初始状态,将该航迹标记为起始航迹.
上述过程将不可避免地产生大量虚假起始航迹,以及重复航迹.多数虚假起始航迹在以后的跟踪过程中将直接消亡,少数航迹可能转变为确认航迹,然后逐渐消亡,重复航迹在此后的跟踪中可以通过航迹融合来进行消除.上述过程的计算复杂度与每个收发对的剩余观测量个数有关,为了降低系统处理时间,在航迹处理之前可以对每个收发对的观测量进行预处理,比如进行距离多普勒跟踪,以最大限度地减少每个收发对的杂波的个数.
3.5航迹状态转移
如图2以及3.4节所示,剩余观量测用于产生起始航迹.单传感器航迹起始算法有很多,最典型的方法为m/n逻辑法,霍夫变换法等,其中m/n逻辑法最适合在工程中应用.m/n逻辑法确认一条航迹的准则是如果该航迹在连续n帧观测中被至少m帧的观测量更新,就将其标记为确认航迹,即如果则航迹起始成功,其中1为指示算子,即如果条件A成立,则1A= 1,否则为k时刻落入航迹τ波门内的单传感器的观测量集合.
本小节我们在m/n逻辑法的基础上提出一种多传感器航迹起始算法,即m/n/v/p算法,具体为:如果起始航迹τ,在连续n帧观测中被至少v个传感器的m帧观测量更新,则将其标记为试验航迹,如果被至少p个传感器的m帧观测量跟新,则将其标记为确认航迹,其中n>m,p>v,除此之外的其他情况,该航迹消亡.即如果则航 迹τ转化为试 验航迹 ,如果则航迹τ转化为确 认航迹,其他 情况航迹τ消亡.
试验航迹在此后的跟踪过程中可能转化为确认航迹,也可能消亡,我们可以采用与起始航迹类似的状态转移规则,即如果试验航迹在连续n帧观测中,被至少p个传感器的m帧观测量更新,则将其转变为确认航迹,如果被至少 v个传感器的m帧观测量更新,则仍然将其标记为试验航迹,继续考察,除此之外的其他情况该航迹消亡.
确认航迹可能消亡也可能继续保持确认的状态,单传感器航迹消亡的判别方法有很多,最典型的判别规则为:如果确认航迹连续q帧没有被观测量更新,就宣告其消亡.文献[12]指出该方法在一定意义上与基于航迹分数的航迹消亡算法是等效的,这里我们提出多传感器航迹消亡算法,即,如果确认航迹在连续q帧的观测中,被少于s个传感器的t帧观测量更新时,就宣告其消亡,即如果则该航迹消亡.
4 仿真与实测数据结果
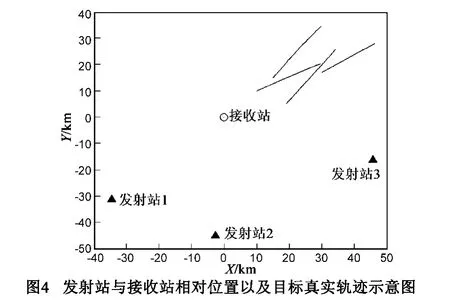
本节我们首先通过仿真实验来验证本文算法的性能.我们采用三个调频广播电台和一个无源雷达接收机来探测目标.我们假设三个收发对具有相同的检测性能,即检测概率相同.调频广播电台和接收机的位置如图4所示.
我们考虑4个目标,飞行轨迹如图4所示.其中目标2,目标3,以及目标4在整个监测过程中均存在,存在时间为100s,目标1在第20s飞入监测区域,第70s离开.我们将双基地距离和的标准差设置为0.75km,多普勒频率的标准差设置为1Hz,将三个收发对的检测概率均设置为0.8,杂波密度从每帧5个杂波逐渐增长到每帧200个杂波,对跟踪过程中的平均虚假航迹数目进行统计.航迹处理之前首先对观测量进行预处理,即进行距离多普勒跟踪.对于每一个杂波密度我们均进行100次蒙特卡洛仿真,其结果如图5所示.
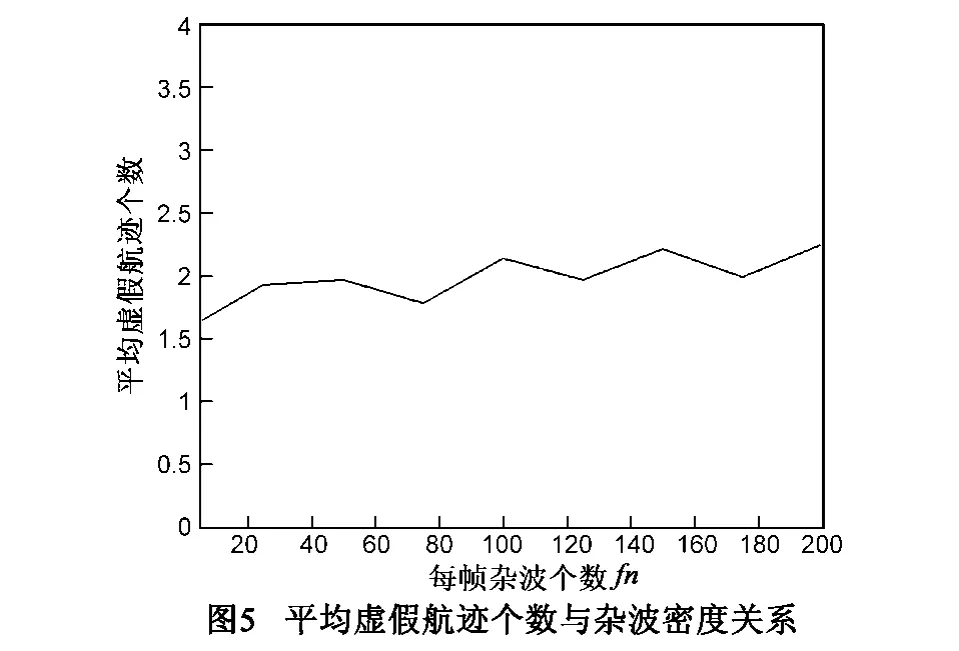
由图5可知,由于我们在航迹处理之前,首先对观测量进行预处理,因此虚假航迹的个数受杂波密度的影响很小.在整个过程中虚假航迹的数目整体很少.
接下来我们将杂波密度设置为每帧50个杂波,检测概率从0.4逐渐增大到0.99,其他条件不变,我们对目标1的确认概率进行统计,对于每一个检测概率,均进行100次蒙塔卡罗仿真,其结果如图6所示.
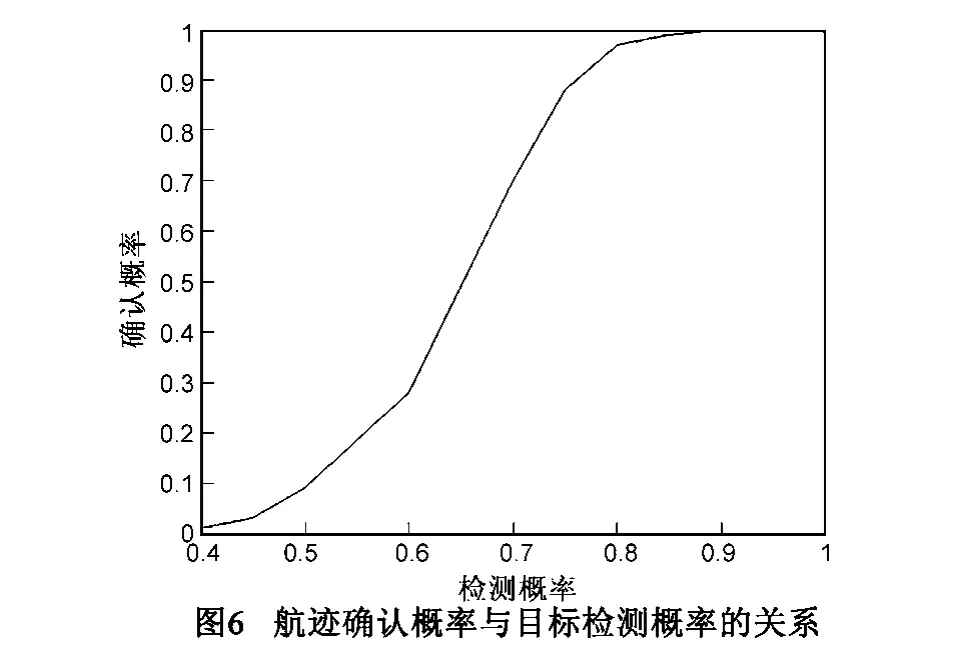
由图6可知,在本文所示的仿真条件下,随着检测概率的提高,目标1的确认概率逐渐提高,当检测概率达到0.8以上时,目标1的确认概率达到95%以上.目标检测概率很低的情况下,为了提高真实航迹确认概率,我们可以适当地放宽航迹起始以及航迹确认的条件,此时虚假航迹的数目将提高,然而虚假航迹在此后的跟踪过程中将逐渐消亡.
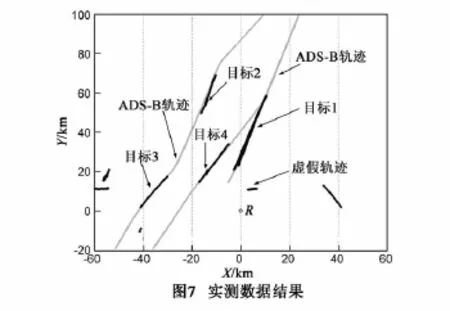
下面我们将本文提出的算法用于实际环境中,发射站与接收站的相对位置仍然如图4所示,图4表示了我国西北地区三个调频广播电台的真实分布,我们对飞经监测区域的目标进行监测,并与ADS-B的结果进行比对,如图7所示.
由图7可知,采用本文算法正确地得到了真实目标航迹,并与ADS-B的结果基本吻合.
5 结论
本文对基于调频广播信号的无源多基地雷达系统中的目标跟踪问题进行了研究,提出了一种综合航迹处理方法,将航迹划分为四种状态,起始航迹,试验航迹,确认航迹,以及消亡航迹,详细介绍了每种航迹的处理方式并且设计了航迹状态转移规则.对于起始航迹本文采用最近邻数据关联方法进行处理,本文推导了顺序多传感器最近邻数据关联方法,对于试验航迹与确认航迹本文采用顺序联合概率数据关联方法进行处理,顺序处理方法大大减小了算法的计算量.最后我们通过仿真实验与实测数据结果证明了本文算法的有效性.
[1]Griffiths H D,Baker C J.Passive coherent location radar systems,Part 1:performance prediction[J].IET Radar,Sonar and Navigation,2005,152(3):153-159.
[2]Colone F,Bongioanni C,Lombardo P.Multifrequency integration in FM radio-based passive bistatic radar,Part I:Target detection[J].IEEE Aerospace and Electronic Systems Magazine,2013,28(4):28-39.
[3]Howland P E,Maksimiuk D,Reitsma G.FM radio based bistatic radar[J].IET Radar,Sonar and Navigation,2005,152(3):107-115.
[4]Colone F,Bongioanni C,Lombardo P.Multifrequency integration in FM radio-based passive bistatic radar,Part II:Direction of arrival estimation[J].IEEE Aerospace and Electronic Systems Magazine,2013,28(4):40-47.
[5]Malanowski M,Kulpa K.Two methods for target localization in multistatic passive radar[J].IEEE Transactions on Aerospace and Electronic Systems,2012,48(1):572 -580.
[6]Blackman S S.Multiple hypothesis tracking for multiple target tracking[J].IEEE Aerospace and Electronic Systems Magazine,2004,19(1):5-18.
[7]Roecker J A.A class of near optimal JPDA algorithms[J]. IEEE Transactions on Aerospace and Electronic Systems,1994,30(2):504-510.
[8]Oh S,Russell S,Sastry S.Markov chain Monte Carlo data association for multi-target tracking[J].IEEE Transactions on Automatic Control,2009,54(3):481-497.
[9]Sigalov D,Shimkin N.Cross entropy algorithms for data association in multi-target tracking[J].IEEE Transactions on Aerospace and Electronic Systems,2011,47(2):1166-1185.
[10]obias M,Lanterman A D.Probability hypothesis densitybased multi-target tracking with bistatic range and Doppler observations[J].IET Radar,Sonar and Navigation,2005,152(3):195-205.
[11]O'Neil S D,Pao L Y.Multisensor fusion algorithms for tracking[A].American Control Conference 1993[C]. Piscataway:IEEE,1993.859-863.[12]Blackman S S.Multiple-Target Tracking with Radar Applications[M].Dedham,MA:Artech House,Inc,1986. 264-271.

吕小永 男,1988年6月出生,河南洛阳人,西安电子科技大学在读博士生,从事外辐射源雷达目标检测与跟踪方面的有关研究.
E-mail:zzuxiaoyong@163.com
王 俊 男,1969年8月出生,西安电子科技大学雷达信号处理国家重点实验室教授,博士生导师.主要研究方向:无源探测、定位及跟踪、自适应信号处理、无源雷达成像、高速信号处理技术.
E-mail:wangjun@xidian.edu.cn
乔家辉 男,1989年3月出生,西安电子科技大学研究生,从事外辐射源雷达信号处理与目标跟踪方面的有关研究.
E-mail:jiaoxue1990@163.com
Integrated Track Management Method in Passive Multi-Static Radar
LÜ Xiao-yong,WANG Jun,QIAO Jia-hui
(National Lab of Radar Signal Processing,Xidian University,Xi’an,Shaanxi 710071,China)
The paper investigates the target tracking problem arising in FM signal based passive multi-static radar,and proposes an integrated track management method.We divide the tracks into four statuses,i.e.initial track,tentative track,confirmed track,and deleted track.Tracking methods for each kind of tracks are detailed.We sequentially exploit measurements of each receiver-transmitter pair to update the tracks,causing the rapid reduction of the computation complexity.Simulation and the real life data results demonstrate the effectiveness of the proposed method.
passive multi-static radar;FM signal;target tracking;track management
TN958.97
A
0372-2112(2016)04-0854-06
电子学报URL:http://www.ejournal.org.cn 10.3969/j.issn.0372-2112.2016.04.014
2014-11-27;
2015-03-05;责任编辑:李勇锋
教育部创新团队计划(No.IRT0954)
