小型风力发电机的限速控制研究
2016-10-13许昌学院电气信息工程学院李跃磊
许昌学院电气信息工程学院 李跃磊
小型风力发电机的限速控制研究
许昌学院电气信息工程学院 李跃磊
本文从变桨距风力机的空气动力学理论入手,运用对空气动力学分析求得贝兹理论的极限值,通过风能的利用系数及叶尖速比之间的关系,从而得出风力发电的系统变桨距控制方法,最后对变桨距的运行状态进行仿真及变桨调节加以分析,验证了此模型的可靠性。
空气动力学;PID控制;双馈发电机;变桨调节
1.引言
随着国家对风力发电机的重视以及发电技术的快速发展,高新技术不断运用到风力发电之中,使得风力发电的性能得到了很大的提升。风力发电机有效利用了可再生能源,而中国是世界上风能资源现存比较丰富的国家之一,更需要开发风电技术。风力发电也能很大程度上减缓我国电力欠缺以及能源的急需,中小型风力发电机的控制比较灵活,对中小型风力电机组特性加以研究,同时控制技术应用运用风力发电当中可以提高中小型风机的利用率和可靠性,因此对其研究具有重大的意义。
2.风力机变桨距控制
多变量的变桨距电机组,具有复杂的非线性特性。要想更好的利用PID控制,就需要对其进行数学建模。通过PID参数的整定,使线性系统控制的精确性得到提升,而风电系统是利用风能转化为机机械能的装置,在风能系统中它的控制是比较复杂的。在风电机组中,如果齿面的硬度较高,则在正常使用时不会带来太大的损失,在这种的情况下,系统的空气动力学模型可表述为:

式中:P为风轮吸收功率;ω为风轮旋转的角速度; c为风能的利用系数;ρ为空气的密度;r为风轮的半径;v为上风向的风速。
系统变桨距执行机构:

其中:Tβ—变桨距执行机构时间常数值;β—桨距角的实际值;βr—桨距角参订值。
2.1变速变桨距控制系统策略
对于各式各样的电机组来说,在变速变桨距模型上增加变桨距执行机构后,对它的控制就很难来估计,这样要想对变桨控制的精确度的提升,就必须添加另外两个控制机构控制器和对输出功率控制的控制器。
(1)主控制器在控制系统中占有主要部分,它不但对风机进行控制,而且也控制功率控制器,然后对变桨距控制器进行调整,从而使风机进行稳定运行。
(2)当风速达到额定功率时,改变变速恒频控制对齿轮箱进行控制,间接的控制桨叶转动,使风轮在良好的尖速比下运行;功率控制器控制变流器,这样就可以使功率稳定的输出。
(3)若风速高于额定的输出值时,通过改变桨距调节器的值控制电机转速,使电机的转速调节CP值,达到使空气流动时的动能能更多的被风力机转化;当风速增加甚至大于到额定风速的值以后,此时经由增加β值,使CP的值下降,从而减少发电机的输出能量。
2.2统一变桨距控制策略
统一变桨距就是改变风力机整个的风力机叶片的节距角β,也同时使其改变统一的角度。一般情况下依据输出功率和风速作为控制量给桨距角指令,传统的风力发电变桨距控制框图如1图所示。其中,速度控制器的作用是风力机组的起动阶段和风速不高于额定风速的欠功率阶段时来控制发电机转速,由控制欠功率阶段的转速来保持叶尖速比使其运行在最好状态。而变桨距控制主要的是发生在风速大于额定后,这时风电机组将进入额定运行状态。将给定值和功率反馈信号加以比对,若是功率大于额定功率时,桨叶节距角就会提高,反之则下降。
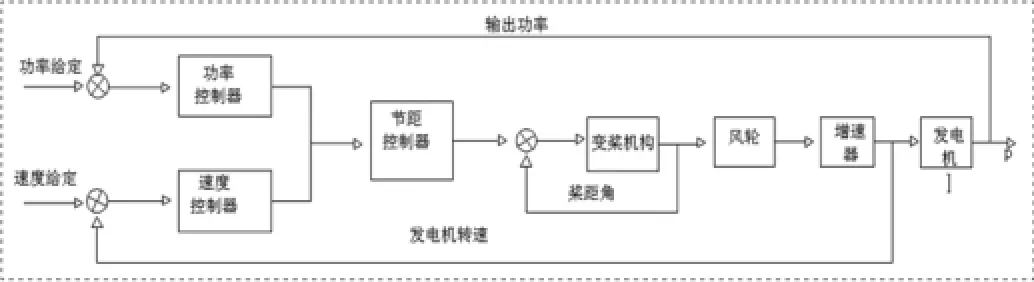
图1 变桨距风力电机的控制图
3.变桨距执行机构
3.1风力发电机变桨控制
在风力发电机的变桨距控制系统中,其对桨叶节距角的控制具有非常关键的作用的是它的执行机构的结构,如今主要利用的是电动和液压执行机构。在这两个执行方式中,液压驱动的变桨系统具有漏油和卡涩等一些问题,如果用电机驱动叶片旋转带动变桨系统,则每个叶片的单独控制就很容易实现了,然对桨叶的控制也将非常容易实现。电动变桨距控制系统框图如图2所示。
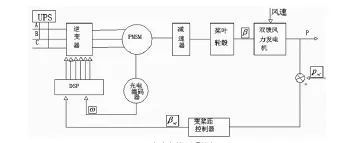
图2 电动变桨距系统框图
图2可以看出,在变桨控制系统图中,电路经过不间断电源(UPS)作为补偿点能保护,经过UPS到达逆变器直流变为可利用的平稳交流电,输出功率的参考值与风速反馈值进行比较后传送到数字信号处理器中进行信息处理,然后传送到逆变器中重新逆变整流;永磁同步电机另一部分经过减速器进行调节,同时调动桨距角的大小,再经过双馈发电机对桨距角和风速的一个测量和比较,得出反馈电流值;最后输出的功率反馈到变桨控制器中进一步对桨距角从新的调整,接着进行数字信号处理,把合适的数据值传输到逆变器中调节电压的大小,这样迅速的对变桨控制做出精确的调整。
3.2变桨距电动执行机构系统的控制
电动变桨距控制就是伺服电机的位置控制,根据永磁同步电机在一定坐标系下各个量的关系方式列出其模型,接着对其进行控制。控制原理如图3所示。
其中,位置参考值是由控制器所决定的,位置参考值与光电编码器所测的位置反馈值对比,所得的差值传送给位置调节器进行PI控制调节。把位置检测到的参考值与转子反馈电流值的变化量送给电流调节器,同时比例积分进行调节,其结果就是转矩电流给定值,对转矩要想实现更好的控制作用,还必须经由空间矢量控制使得出磁通的空间位置与电流矢量的方向成90°;再调节器和电流的调节下的结合下动态响应更加迅速。
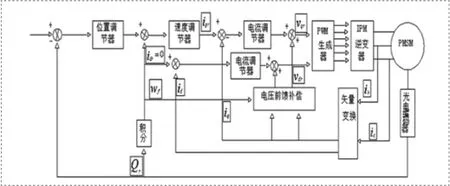
图3 永磁同步电动机伺服系统控制框图
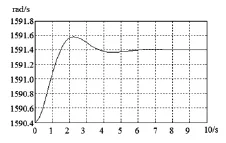
图4 在风速5m/s下输出的转速
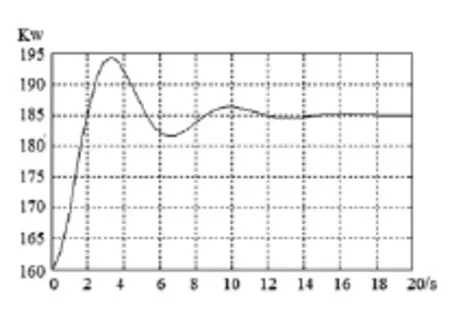
图5 在风速5m/s下输出的功率
4.结论
本文仿真是对一台变桨风力机在较稳速的情况下进行的仿真,仿真用的软件是Matlab10.0/Simulink。如图4,5,6,7所示额定风速分别是5m/s和18m/s的仿真结果图,PID的控制器参数是kp=0.006,kI=0.002,kD=0.002。
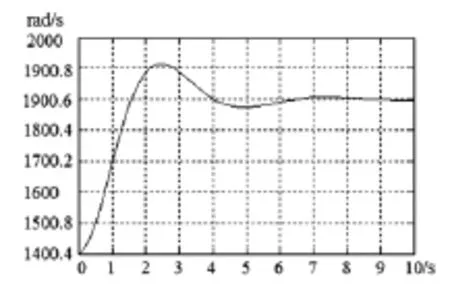
图6 在风速18m/s输出的转速
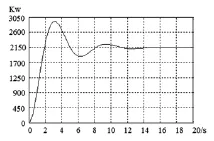
图7 在风速18m/s输出的功率
本文,在提前分析了风力机,风能的特性和异步私服电机的理论基础下,研究了最大风能的追踪以及额定功率稳定运行的控制方略,并且了利用了PID控制的方略进行了仿真,仿真结果验证了模型的可靠性,但在精确上还是有所不足。
[1]章伟,曾雪兰,邓院昌等.小型风力发电机应用分析及评价[J].电网与清洁能源,2012,28(5):82-86.
[2]勒古里斯.风力机的理论与设计[M].施鹏飞译.北京:机械工业出版社,2007,12:144-148.
[3]刘琦,叶杭冶.风力发电机组的变距控制系统[J].机电工程,1999(5):140-143.
[4]郭威,邢钢.风力发电机组变桨距控制方法研究[N].农业工程学报,2008,5.
[5]Mamdani, E.H. S.Assilian. An experiment in linguistic synthesis with a fuzzy logiccontroller[J]. Li1t.J. Man Mach. Studies.1975,7(1):1-13.
[6]魏永强.小型双馈风力发电机变桨控制方法研究[D].长春工业大学,2012:30-45.
[7]陈中,顾春雷.电力拖动自动控制系统MATLAB仿真[M].北京:清华大学出版社,2011,04.
李跃磊(1984-),男,河南许昌人,助理实验师,研究方向:自动控制。
河南省高等学校重点科研项目,15A470020。
