模型水轮机同步成像方法及空化观测系统研究
2016-10-13刘智良崔天祥陈金霞郭全宝黄茂盛
刘智良,崔天祥,陈金霞,郭全宝,黄茂盛
模型水轮机同步成像方法及空化观测系统研究
刘智良1,崔天祥2,陈金霞1,郭全宝1,黄茂盛2
(1. 哈尔滨大电机研究所,哈尔滨 150040;2. 哈尔滨工业大学,哈尔滨 150001)
模型水轮机空化状态的界定普遍依靠观测试验来实现,观测多采用人工观测的方法,也有采用摄像机摄像的方式进行试验,两种方式均存在各自的缺陷。本文根据观测试验原理提出一种同步成像方法并设计同步成像系统,成像系统的应用对模型水轮机水力性能优化设计及空化研究提供有力支持。
模型水轮机;空化;同步成像;观测
0 前言
近年来,随着水轮机技术的进步,人们对于水轮机的内、外特性认知程度也有了极大提升,随之而来是人们对于水轮机高效率追求的同时也对其稳定性提出了更高的要求。
空化是影响水轮机水力稳定性的重要因素,模型水轮机空化以及空化范围的判定目前主要还依靠观测的方式进行。国内外业内也有不少学者提出利用空化在线监测系统对其进行判定,如早期Kaye和Farhat等根据加拿大魁北克水力研究所提出的振动包络谱检测理论提出了振动信号数字包络检测的方法监测空化现象[1,2],瑞士学者Dupont、法国学者Dorey和法国学者Bellet等人采用测量水轮机轴振动的方式进行空化监测[3~5],斯洛文尼亚Rus采用水听器监测空化噪声[6];国内西安理工大学通过自制水听器进行分析,哈尔滨工业大学,清华大学蒲中奇、张伟等人利用空化的振动和噪声特性监测水轮机空化现象[7,8],华中科技大学也利用类似的方法对原型水轮机空化进行监测分析[9],但上述方法距离工程应用还需要进一步研究和验证。
模型水轮机成像观测是指对模型水轮机转轮叶片的初生空化、间隙空化、叶道涡和脱流等空化现象的图像观测试验,以此来确定水轮机模型转轮的空化性能[10]。随着人们对于水轮机稳定性要求的提高,对于空化发生位置及范围界定的精确程度要求也越来越高:如转轮叶片出水边初生空化状态的确定,转轮室内部叶道涡及脱流初生线的确定等。
此外,随着人们对于水轮机水力性能研究的深入以及模型测试技术的进步,成像观测方法和手段相应的提升也是势在必行,如准确低观测空化现象发生位置可以指导水力设计者对转轮叶片型线的优化;对于在模型试验过程中出现的特殊水力现象,尤其是对当前认知水平下无法解释的珍贵影像资料进行清晰记录与长期保存,日后对其深入研究和分析可以促进水轮机研究的进步等。
由此可见,模型水轮机的成像观测在模型试验中的地位越来越重要,在未来的试验中,无论是指导水轮机水力性能优化还是对新水力现象的分析与研究,成像观测都将发挥着越来越重要的作用。
1 成像观测原理与现有方法的缺陷
传统的成像观测方法通常是以人工观测法为主,该方法的主要原理是依据人眼的视觉暂留现象。试验时,试验人员借助频闪光源,调节光源的闪光频率至与转频相同或相近连续闪光,在视觉暂留效应的作用下,观测者便得到一系列的模型转轮观测图像序列,人脑将此图像序列按照时间先后连接在一起,便使得试验人员看到一幅模型转轮“静止”或“缓慢”变化的画面,完成观测试验。从本质上讲,人眼借助频闪光源进行成像观测并未实现与转频“同步”,实质上只是频闪光源自身实现与转频的同步,观测试验的完成完全是通过大脑对图像的后期编辑实现的,也就是说试验人员与光源是两套独立的系统。此外,由于成像观测的过程通常较长,人眼长时间暴露在强光源下,极其容易产生视觉疲劳,观测结果的准确性容易受到影响,同时也易对人眼造成损伤,而且观测到的图像现象也无法以视频的形式存储下来,只能通过试验者记忆来描述,带有主观性。
以摄像机为核心的成像观测系统的出现弥补了成像结果无法记录的缺陷,系统以磁带和录像机为存储媒介,实现了对观测到的视频资料的保存。可是磁带存储内容有限且难于长期保存,高清数字摄像机的出现虽然解决了存储问题。但是由于摄像机本身是采用固定帧率进行拍摄的成像设备,失去了人脑的“后期编辑”功能,图像采集与光源系统相当于也是分立系统,成像时两套系统存在着频率差异,即使偶尔频率一致时拍摄也存在相位差,摄像机也无法与频闪光源同时曝光成像,导致得到的图像帧序列明暗交替,即便采用高分辨率的高清数字摄像机也很难得到清晰的影像,分析时很难准确确定产生空化的位置信息,不足以对空化现象的研究以及模型转轮优化设计提供有效支持。
2 同步成像观测系统研制
从上面的分析看,无论是人工观测还是使用摄像机成像观测,其最大的缺陷在于:成像设备均与频闪光源是相对独立的两套系统,两套设备的动作不同步。因此,要解决成像观测的核心问题是首先解决如何“同步”的问题。所谓的“同步”是指成像设备动作与频闪光源动作的一致性,即两套系统动作的频率相同,相位一致。因此,需要将原有的两套系统有效地集成到一个系统中去,使得系统具有统一的触发信号源,控制频闪仪和成像设备同步动作完成成像观测。
2.1 成像观测系统同步方法及系统构成
随着数字电子技术的发展,基于CCD和CMOS传感器的数字高清相机、数字高清摄像机甚至数字高速高清摄像机大量涌现;而计算机应用技术的快速进步及处理器运算能力的飞速提升,使得这些成像设备在提升了成像质量的同时也提高了成像速度,减小了设备体积,而这些成像设备具有接口丰富,成像清晰,数据传输可靠等优点,为成像系统研制提供了必要条件。
本文利用数字式高清工业相机的拍摄帧率可程控以及频闪光源的闪光频率可外部信号控制的特点设计模型水轮机空化成像观测系统,系统原理示意图如图1所示。
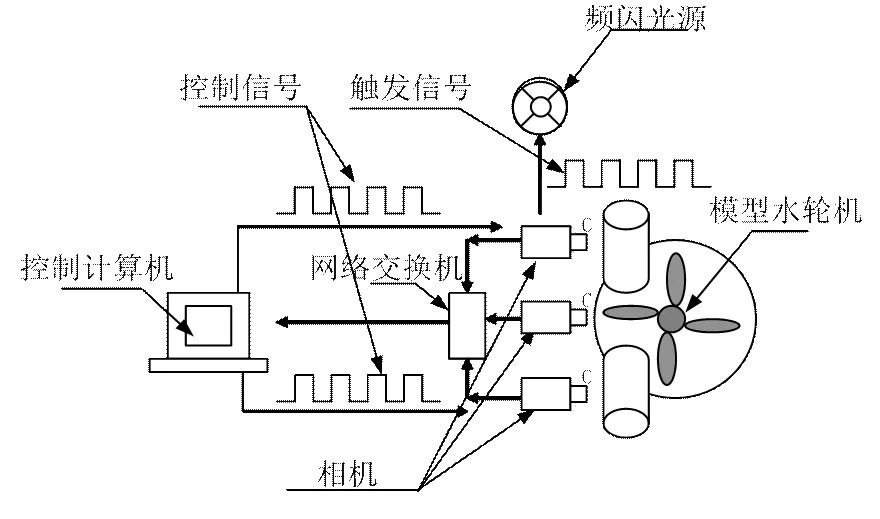
图1 成像观测系统原理示意图
如上图1所示,模型水轮机成像观测系统由主控计算机、成像相机、频闪光源和网络交换机组成。主控计算机通过程序设置成像相机的拍摄帧率,控制相机拍摄频率与模型水轮机的转频相同或相近。相机在以程序指定频率控制快门动作的同时通过触发电路向频闪光源发出触发脉冲信号,频闪光源接收到触发脉冲信号后立即闪光,为相机成像提供光源。相机在频闪光源闪光的同时完成曝光得到一副完整的图像后,将图像信息从网络接口传回主控计算机,计算机通过软件将接收到的图像信息按时间序列合成流媒体视频,得到水轮机模型转轮相对静止或缓慢转动的视频流媒体文件,从而模拟人眼和大脑成像观测时的状态进行成像观测。
2.2 相机远程控制与同步的实现
成像观测系统利用带有GigE Vision协议的数字相机,通过开发控制软件实现主控计算机对相机帧率的远程控制,数据传输与影像合成。
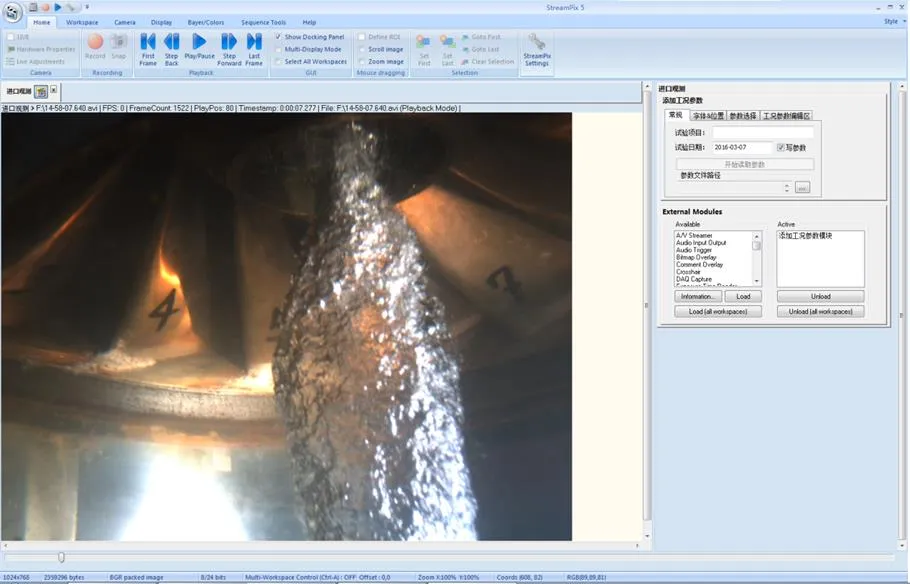
GigE Vision接口协议是一种基于千兆以太网通讯协议开发的相机接口标准,具有传输距离长,无需图像采集板卡且偏重图像处理的优点。首先通过在主控计算机上开发的软件设置相机成像帧率(Frame Rate),而后将控制指令通过网络传递给相机,设置界面如图2所示,相机接到指令后按照设定的帧率进行图像拍摄,同时通过相机内部电路将接收到的拍摄帧率转换成TTL电平信号,通过相机的信号输出接口发送至频闪光源,频闪光源此时切换至外触发功能,等待触发信号的到来,当其接收到触发信号后便按照触发信号频率进行闪光,相机在频闪光源闪光的同时完成曝光成像,成像后相机将图像信息通过网络回传给主控计算机,计算机利用软件将每一帧图像按时间先后顺序合成视频流媒体文件并实时显示,试验人员便得到连续变化的影像。
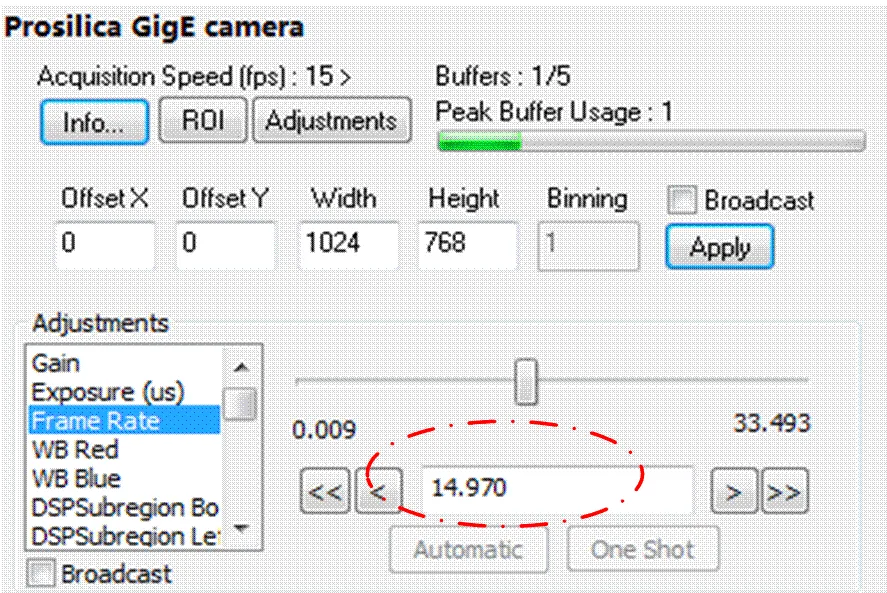
图2 相机频率设置界面
由于电信号的传播速度与光速相同,所以可以忽略相机接收到控制信号到将触发信号传递至频闪光源控制器的延时,因此消除了相机成像与频闪光源闪光的相位差,这样便实现了成像系统的相机与频闪光源动作的严格同步;此外,采用具有GigE Vision协议的数字相机,主控计算机对相机的软件控制以及数据传输均通过网络实现,传输距离高百米甚至上千米,实现了成像系统的远程控制,使得试验人员可以在控制室通过主控计算机屏幕完成成像观测的工作。
2.3 工况字幕的叠加与数据存储管理
为了使观测到的水力现象便于存储下来日后进行分析,该水力现象发生时的试验工况参数是必不可少的信息,因此,在获得图像的同时应将工况信息一并叠加在其上并保存下来,即在观测的图像上叠加试验工况参数字幕。
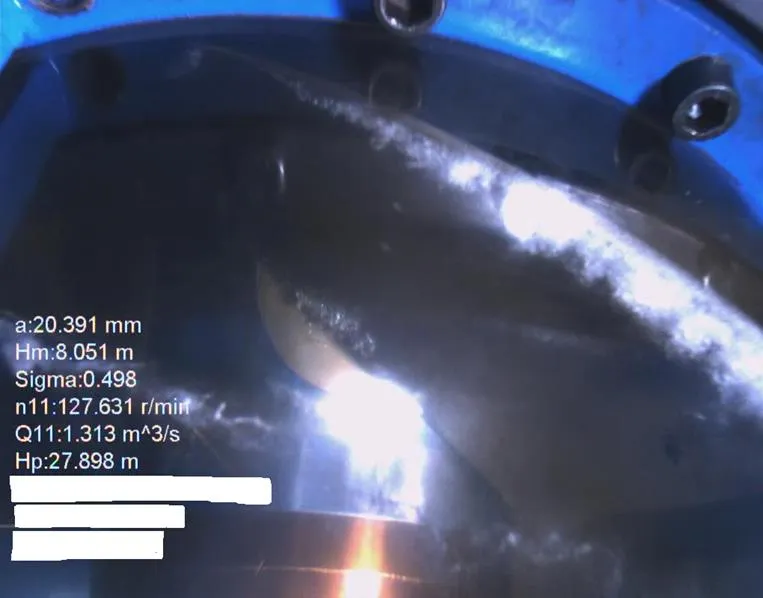
实时试验工况参数由水轮机模型试验台测试系统采集并提供输出,通过网络共享的形式与成像观测系统的主控计算机进行数据交互。主控计算机首先加载开发好的工况字幕叠加软件模块,如图3所示,该模块按照与测试系统约定的通讯协议实时读取试验工况参数,读取参数后与相机回传的图片信息进行图像合成,合成后通过软件将合成后的图像信息按照时间先后顺序合成流媒体文件实时显示。成像系统利用软件叠加字幕时时可以对字体大小、颜色及字幕显示位置等参数进行调节以适应不同的观测背景。

图3 调用自行开发的字幕添加模块
工况字幕叠加模块可以根据试验项目的需求选择不同的工况参数组合,同时可添加工程项目名称以及记录试验时间和日期。工况字幕叠加模块界面如下图4所示。
2.4 图像的远程共享
为便于不同试验人员在不同地点同时共享观测结果,成像观测系统采用相机的网络输出接口、交换机、网络视频分屏器以及主控计算机组成远程图像显示系统。系统通过计算机的显卡将当前显示器显示的图像信息实时输出到网络视频分屏器,网络视频分屏器利用网线将图像信息传输至远程客户端的网络视频分屏器,客户端分屏器将接收到的数据解码后输送至客户端显示设备,则实现了成像观测系统的图像远程共享功能。远程显示原理框图如图5所示。
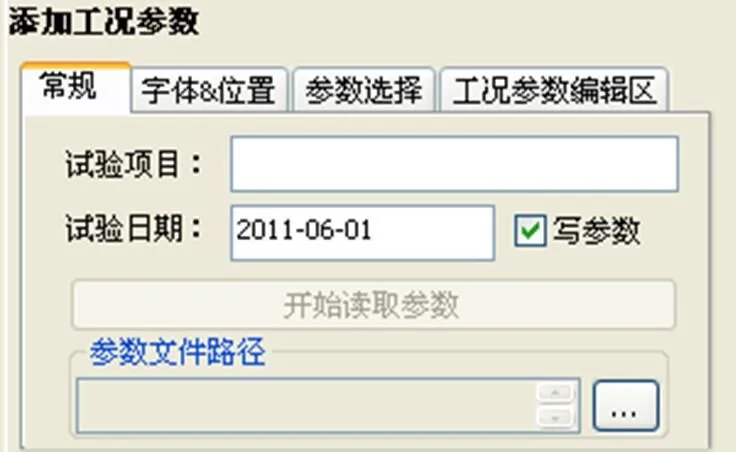

图4 字幕添加模块工况参数选择界面
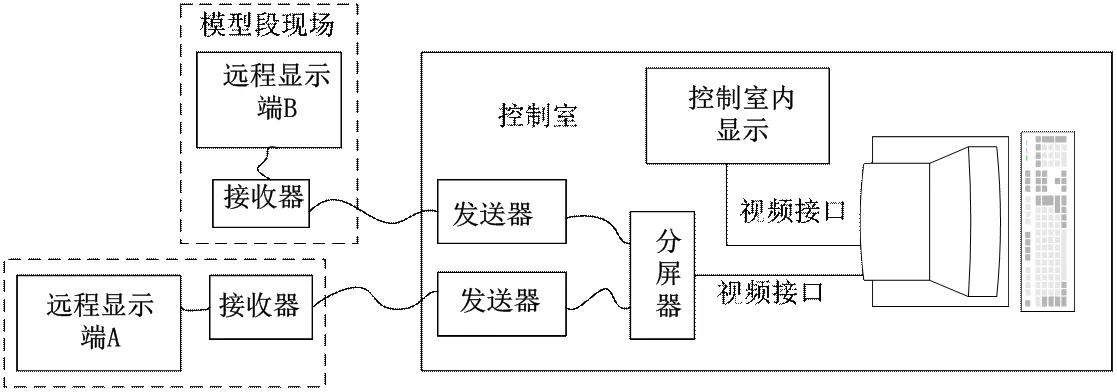
图5 成像系统远程共享显示原理框图
2.5 数据存储
成像系统采集到的图像可以以图片的形式对回传的图片序列进行单张存储,也可以利用软件将图片序列合成流媒体视频后可以以多种Windows通用视频格式存储在主控计算机的硬盘驱动器中。无论是以图片格式还是以流媒体文件进行存储,均可保证存储的信息不压缩,不失真。
3 同步成像系统应用及与传统成像系统观测效果比较
3.1 同步成像系统应用
同步成像观测系统可用于水轮机模型转轮进口脱流、叶道涡,模型转轮出口初生空化、间隙空化以及涡带现象的观测。利用万向关节臂或三脚架可以灵活地将成像设备及光源安装在水轮机模型段透明锥管处(如下图6所示)进行模型转录叶片出口的空化及涡带现象进行观测分析;配合内窥镜的使用,通过在顶盖或下环上开出的空洞探进转轮室内部,可对模型转轮进口的叶道涡和脱流现象进行观测。同时,成像观测系统实现了远程控制与远程多地影响共享,使得试验人员仅在模型试验台的控制室内完成各种流态的观测与记录。

(a)
(b)
图6 成像观测系统安装及使用效果图
3.2 成像观测效果
由于采用了数字高清工业相机,系统的成像效果清晰,图像辨识度高。转轮出口初生观测以及涡带观测对比结果如下图7所示。
图7中(a)(b)为同步成像观测系统对尾水管涡带及转轮叶片出水边空化观测效果,(c)为轴流转桨式水轮机叶片空化观测图像,从成像效果上看,同步成像观测系统得到的图像上涡带轮廓清晰,转轮叶片轮廓清晰可辨,空化现象发生的部位以及严重程度清晰可见,轴流转桨式模型水轮机桨叶与锥管间隙空化、桨叶与轮毂体之间的间隙空化现象清晰可辨,叶片头部的进水边头部脱流发生的位置及脱流形状也清晰可见,成像系统整体在图像清晰度上有显著提升,如在叶片标注网格则可更加准确辨识空化发生位置,提高观测质量。

(a)

(b)
(c)
图7 转轮出口观测效果图
图8为转轮室内部叶道涡及脱流现象的观测效果对比。
图中(a)为使用同步成像观测系统得到的背面脱硫观测图像,(b)为同步成像观测系统观测得到的叶道涡图像。从成像质量上看,同步成像观测系统图像对比度高,叶道涡和脱流现象清晰可见,即使在弱光环境下仍能得到辨识度很高的图像,配合使用不同角度的内窥镜可以对叶片与上冠交界,叶片与下环交界以及叶道间的空化现象进行有效观测。

(a)

(b)
图8 叶道涡观测效果比较
4 结论
同步数字成像观测系统已在大电机研究所各高水头水力试验台成功应用,在白鹤滩,乌东德、丰满改造等重大项目水力性能研发中起到重要作用。模型水轮机同步数字成像观测方法的提出及观测系统的成功研制首次实现了:
(1)将图像采集系统与频闪光源的真正有效地集成为一套系统,在系统运行的时序上实现了真正的同步运行;
(2)成像观测系统实现了远程控制,可以使观测者在控制室完成空化观测试验的全部操作,摆脱了人工现地观测的落后方式;
(3)从图像采集、数据传输到存储实现了模拟到数字化的飞跃,观测数据易于长期保存与管理;
(4)实现了模型水轮机观测系统远程控制和观测影像异地实时共享,图像的异地共享便于不同研究者异地同时研究。
[1] Escaler.X., E. Egusquiza, M. Farhat, etc. Detection of cavitation in hydraulic turbines[J]. Mechanical Systems and Signal Processing, Vol. 20/4 (2006): 983-1007.
[2] Escaler X., Equsquiza E., Farhat M. Cavitation erosion prediction in hydro turbines from onboard vibrations[J] 2004.
[3] Escaler X., Egusquiza E., Mebarki T., etc. Cavitation Detection and Erosion Prediction in Hydro Turbines[C]. Proceedings of the 9th of International Symposium on Transport Phenomena and Dynamics of Rotating Machinery, February 10-14,2002,Honolulu,Hawaii.
[4] Escaler X., Egusquiza E., Mebarki T., etc. Field Assessment of Cavitation Detection Methods in Hydropower Plants[C], Proceedings of the Hydraulic Machinery and Systems 21st IAHR Symposium, September 9-12,2002, Lausanne.
[5] Farhat M., Bourdon P., Lavigne P., etc. The Hydrodynamic Aggressiveness of Cavitating Flows in Hydro Turbines[C]. ASME Fluids Engineering Division Summer Meeting, June 22-26, 1997:367-382.
[6] Tomaž Rus, Brane Širok, Marko Hocˇevar. An Investigation of the Relationship Between Acoustic Emission, Vibration, Noise, and Cavitation Structures on a Kaplan Turbine[J]. Journal of Fluids Engineering. 2007.9 Vol. 12:1112-1122.
[7] 蒲中奇, 张伟, 施克仁, 等. 基于小波奇异性理论的水轮机空化检测[J]. 振动与冲击,2005,24(5):74~76.
[8] 李超, 应崇福, 白立新, 等. 流体动力空化的噪声特性及空化强度的测量[J]. 中国科学,2012,42(10):987–995;
[9] 吴道虎. 基于声学的水轮机状态监测技术研究[D]. 华中科技大学博士论文,2006.
[10] 徐洪泉, 孟晓超, 徐尚智, 等. 水轮机模型空化观测问题探讨[C]. 第十九次中国水电设备学术讨论会论文集. 2013, 389-393.
The Research of Synchronization Imaging Method and Cavitation Observation System for Model Hydro-turbine
LIU Zhiliang1, CUI Tianxiang2, CHEN Jinxia1, GUO Quanbao1, HUANG Maosheng2
(1. Harbin Institute of Large Electrical Machinery, Harbin 150040, China;2. Harbin Institute of Technology, Harbin 150001, China)
The judgment of cavitation of model hydro-turbine mainly depends on observation, and the artificial way is usually chosen to achieve that. Observation with video camera is common, too. However, both artificial way and observation with video camera are defective. A synchronization imaging method is presented in this paper according to the principle of cavitation observation, and a synchronization imaging system is designed. The application of synchronization imaging system will be significant for optimization design of model hydro-turbine and research of cavitation.
model hydro-turbine; cavitation; synchronization imaging; observation
TM612
A
1000-3983(2016)06-0056-06
2016-03-07
刘智良(1980-),2009年毕业于哈尔滨工业大学电气工程及自动化学院,仪器科学与技术专业,现从事水轮机模型及现场测试工作,硕士,工程师。

审稿人:赵 越