基于滑模观测器的永磁同步电机无位置传感器算法综述
2016-10-13吴楚许凯
吴 楚 许 凯
基于滑模观测器的永磁同步电机无位置传感器算法综述
吴 楚1许 凯2
1.武警工程大学,陕西 西安 710086 2.沈阳指挥学院,辽宁 沈阳 110000
介绍了永磁同步电机无位置传感器算法的主要方法,其中,滑模观测器被公认为适用性较高的方法。因此,主要对滑模观测器在永磁同步电机无位置传感器算法的研究现状以及今后研究方向进行了详细的介绍。
永磁同步电机;无位置传感器;滑模观测器
1 永磁同步电机无传感器控制策略
由于永磁同步电机是一个非线性多变量强耦合的复杂对象,所以对它的有效控制一直以来就是本领域的热点问题,其中高速永磁同步电机无传感器控制一直是学者们研究的热点[1]。
为了提高和改善永磁同步电机的控制性能,国内外学者致力于将先进的无传感器控制策略引入交流调速系统中,比如模型参考自适应、Luenberger 观测、磁链观测器和滑模观测器等,这些方法各有特点,下面对这些方法进行逐一总结。
1.1 模型参考自适应法
模型参考自适应法(Model Reference Adaptive System,MRAS)它将观测对象的实际数学模型为参考模型,建立一个与其具有相同输入和输出并含有待观测对象的可调模型,再通过自适应调整机构根据两个模型的输出变量不断调整可调模型的待观测量,使其逐步逼近实际值。该方法同样是通过反馈环节以逐步减小估算误差,该方法估算精度高并具备一定的鲁棒性。
1.2 Luenberger 观测器
该方法属于状态观测器的一种,它将估算值与实际值之间的估算误差反馈至观测器方程中,不断修正观测器的估算精度,从而达到对观测对象准确估算的目标。该方法结构简单,响应速度较快,估算精度较高,在没有扰动的情况下可以做到无误差估算,具有一定的工程应用价值,然而该方法鲁棒性一般,在遇到扰动时,估算精度会随之下降,必须结合误差补偿算法才能进一步提高估算精度。
1.3 磁链观测器
该法通过对电机定子磁链的在线估算以确定PMSM的位置和速度信息,从而解决了上述几种基于反电势的无传感器控制方式在电机低速运行时估算精度较差的问题。磁链观测器法通过对定子电压方程的积分运算确定PMSM在α和β轴上的磁链大小,再通过反正切函数和微分运算计算出转子位置和速度。虽然该方法在PMSM低速运行时具有较好的观测精度,但由于该方法是一种纯积分运算,如果初始值选取不当,系统在整个无传感器控制过程中都会存在估算误差。
2 永磁同步电机中滑模观测器研究现状
传统的滑模观测器因为鲁棒性很强,实现方法简单,被广泛应用于工作在各种复杂条件下的永磁同步电机调速系统当中,但由于其控制实现过程中高频切换信号的存在,产生了较大抖振,难以满足高精度的控制要求。研究学者们针对不同应用场合,将各种先进的技术与滑模观测器结合在一起进行了各种新型滑模观测器研究。
(1)通过理论分析可知,由滑模观测器的抖振引起的观测器误差大小与滑模增益系数、开关频率和电机参数等有关。其中,电机定子电阻与电感等参数与电机自身结构有关,通常可以将其当作常数,但是随着电机温度的升高这些参数也会随之发生变化,所以,一些学者将参数在线识别方式与滑模观测器相结合在了一起,对电机参数进行准确获取,以提高观测器估算精度。
(2)在实际控制中,抖振大小主要与开关频率和滑模增益系数有关。开关频率越大抖振越小,理想的滑模观测器,当开关频率趋向无限大时抖振趋向于零,但是,电机的开关频率不宜过大,这样会导致电机温度升高过快而发生故障,因此开关频率的取值也是如今改进滑模观测器的一个方面。
(3)滑模增益与抖振大小有成正比的关系,当低转速时滑模增益不易过大,这样会产生较大抖振。当高转速时,滑模增益又必须足够大才能实现定子电流的跟踪,因此如何实现滑模增益自适应也是新型滑模观测器的一个研究热点。
3 永磁同步电机中滑模观测器研究方向
传统滑模观测器结构框图如下:
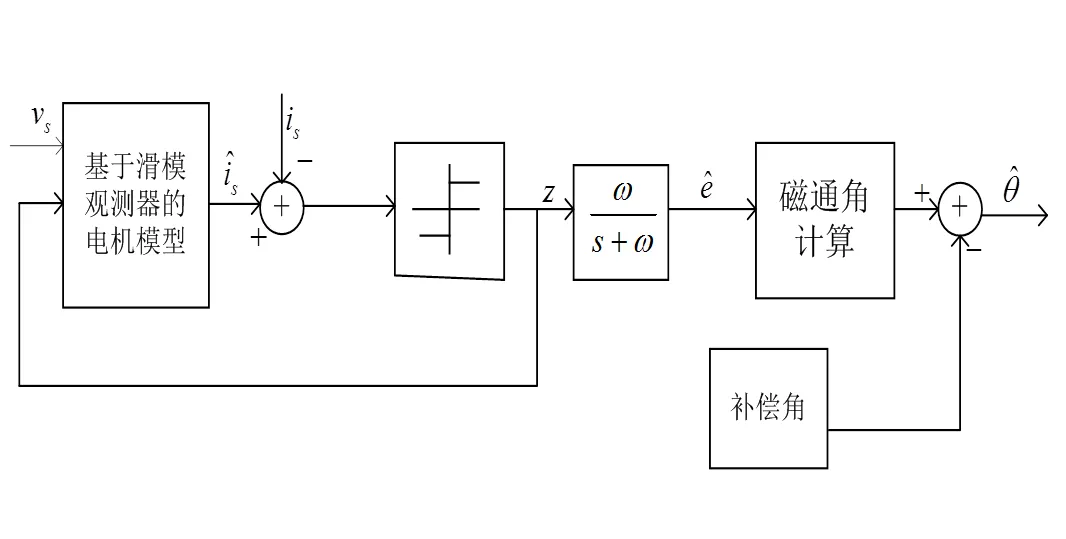
图1 SMO结构框图
由图1可以看出,在滑模观测器改进上还可以从以下用三方面入手:
(1)通过设计低通滤波器,利用低通滤波器对滑模观测器观测的结果进行滤波,从而得到平滑的电机转速和位置估计值但该方法会产生相位滞后,在实际应用中需进一步补偿。
(2)切换函数,即利用饱和函数或其他函数代替滑模控制切换不连续控制,但是由于受边界层限制,无法保证观测误差精确到零。
(3)高阶滑模观测器方法,即釆用高阶滑模理论设计高阶滑模观测器用于永磁同步电机速度和位置观测,从而避免了传统一阶滑模观测器“抖振”问题,也不会降低观测精度和产生其他附加不利因素,但高阶滑模观测器相对于传统一阶滑模观测器很少采用李雅普诺夫函数实现,设计相对复杂,工程应用难,故仍需大量研究。
4 结束语
基于滑模观测器永磁同步电机无传感器控制是目前的一个研究热点,它直接关系到一个系统运行的效率。新型的控制方法研究必须从实际出发,以满足电机应用的实际需求为出发点,尽力精简结构,力求简单实用,这样的控制方法才有生命力。
[1]张晓光.永磁同步电机调速系统滑模变结构控制若干关键问题研究[D].哈尔滨:哈尔滨工业大学,2014.
Survey of Position Sensorless Algorithm for Permanent Magnet Synchronous Motor Based on Sliding Mode Observer
Wu Chu1Xu Kai2
1 Armed Police Force Engineering University,Xi'an,Shaanxi 710086 2 Shenyang Command College,Shenyang,Liaoning 110000
In this paper,the main method of position sensorless algorithm for permanent magnet synchronous motor (PMSM) is introduced.Sliding mode observer is considered to be the most suitable method.In this paper,The research status of the sliding mode observer (PMSM) algorithm and the future research direction are introduced in detail.
permanent magnet synchronous motor; position sensor; sliding mode observer
TM341
A
1009-6434(2016)12-0153-02
