基于灰色关联的多维分配航迹算法研究
2016-10-11李磊
李磊
(滁州学院 电子与电气工程学院,安徽 滁州 239000)
基于灰色关联的多维分配航迹算法研究
李磊
(滁州学院电子与电气工程学院,安徽滁州239000)
航迹关联算法是多传感器信息融合系统的重要组成部分,也是实现航迹融合的基础.同一个平台纯方位多传感器组成的信息融合系统,因各类传感器输出的航迹信息只能显示不同时刻的方位信息,导致航迹相关判断难度增加.文中针对多传感器系统航迹管理算法只可解决两局部节点问题,提出多维分配灰色航迹关联算法,从这种算法的管理策略及描述入手,选择仿真实例获取各传感器航迹间管理结果,验证结果表明,这种算法的性能优越性高于传统算法,其正确率明显高于灰色航迹管理算法.
多维分配;灰色理论;关联算法
随着科学技术的快速发展,目标跟踪环境呈现复杂化的特点,准确跟踪目标是设计跟踪系统的主要依据,本领域研究的重点是数据关联算法的问题.分布式传感器系统中传感器将策略数据提供给全局估计媒介对局部节点进行连接,每个节点完成单传感器多目标追踪,并将结果发送至融合中心,由融合中心完成多传感器数据融合的效果.文中以航迹关联算法展开研究,创新点是采用多种算法结合使用,这种算法采用灰色理论获得各种传感器航迹间灰色关联度,根据这个关联度构造多维灰色关联度矩阵.文章最后借助仿真实例把本文算法与灰色航迹关联算法展开比较,说明本算法关联性能优于传统算法.
1 系统描述
假定用Ns个传感器跟踪T个目标,基于离散时间间隔进行观测,每个观测均由多个量测组成[1].部分量测结果原则目标,有些源自杂波、少数存在漏测的情况.假设目标运动模型为:

上述公式中,X(k+1)∈Rn作为k+1时刻目标全局状态向量,F(k)∈Rn,n、G(k)∈Rn,h分别表示状态转移矩阵和输入控制矩阵,V(k)离散时间白噪声序列,且E[V(k)]=0,E[V(k)V(k)']=Q(k),设计的测量方程为:

其中,Hns(k)表示传感器ns测量矩阵,wns(k)表示零均值.
2 航迹关联策略及算法
航迹关联就是明确传感器接受的量测信息和目标源,广泛存储在多传感多目标跟踪系统中,主要包括量测-量测、量测—航迹、航迹-航迹三种航迹关联.量测-量测是能够创建新目标提供充足的初始化信息及稳定的航迹生存周期,用来观测数据有效融合;航迹-航迹用来明确哪些局部航迹源自同一个被跟踪目标,为从多个传感器输出的多目标航迹数据展开融合;量测-航迹主要用来更新航迹,积极维持跟踪目标的持续效果,用来及时修正新的观测数据[2].文中以“量测-航迹”数据管理最近的方法研究相应的关联法.
在分布式航迹统合系统内,每一个传感器均具有独立处理具备量测的能力,形成局部航迹并发送至融合中心.融合中心依据各个传感器航迹数据实现航迹关联并估计航迹状态,组成全局估计.航迹关联是指将各个传感器航迹实施分组,确保同一组航迹表示相同的目标[3].聚类是把有待处理的对象划分为若干类,促使同一类对象尽可能相似,不同类对象处于相异状态,二者用来发现隐藏在数据背后的分组和数据信[4].事实上,二者目标及作用相互移植,根据上述分析结果可知,可由全新的角度分析航迹关联问题.
2.1关联策略
K-Medoids聚类算法是划分算法中常用的一种形式,具有准确性高的特点.由于Medoids不易被极端数据影响,如果出现噪声或孤立点数据时,K-Medoids算法依然保持原有的特性,适用于数据密集的数据集中.当然,K-Medoids算法也存在聚类结果多样化、初始化敏感等缺陷.因在分布式多传感器航迹系统应用过程中,采用的传感器与每个传感器扫描的数量较多,若对所有来源不同传感器的航迹均实施两两关联或融合处理,会为整个系统带来较沉重的负担[5].因此,文中通过把局部航迹与系统航迹相互关联的策略,选定某条系统航迹为固定Mediod,从而避免K-Medoids算法初始化随机性及Medoids轮换必须付出沉重的代价.这种关联策略能有效降低需要关联的航迹数量,在一定程度上提升系统运行效率.同时,因来自同一个传感器的航迹均由不同目标形成,又因每条系统航迹来自不同的目标,所以,来源一个传感器的某条航迹智能与一条系统航迹相互关联,从而避免聚类结果多样性的情况.
2.2算法描述
如果将局部节点Sm中的条航迹看做nsm个已知模式,将局部节点Sn航迹作为待识别模式,此时,航迹关联检验就是典型的模式识别问题[6].采用灰色理念,选定局部节点Sm的航迹i作为参考数列,记作Xi={Xi(k)|k=1,2,…,l}.假设来自局部节点Sn第j条航迹属于比较数列,表示为Xj=其中表示局部节点Sn的已知航迹数.为确保数据具有可比性,在展开灰色关联分析时,必须对数据列实施生成出来[7].文中使用区间值化方对特征指标数据展开标准化处理.

参考数列X0(k)与比较数列Xj(k)关联系数公式为:

在公式(4)中,ρ表示分辨系数,ρ数值越小,表明分辨能力更大,通常情况下,ρ=0.5,ρ具体取值根据实际情况确定被称为两级最小差表示两级最大差,Δij(k)表示第k个指标Xi与Xj绝对值.求解Xi(k)与Xj(k)的关联系数:

把每一个比较数列各指标关联系数集中展现在一个值上方便展开比较,这个值称作灰关联度.对比数列Xj对参考数列灰关联度记作:

此时,多局部节点可以构造全局统计量:

定义相应的二进制变量:

如此一来,对M各局部节点公共区域航迹关联问题基于灰关联矩阵转换为多维分配问题,表示为:

3 仿真分析实例
3.1设计仿真条件
为检验算法的性能,文中采用蒙特卡洛方法对灰色航迹关联算法展开50次仿真处理,每次仿真共设计12步,依次在60、120批目标的环境下进行.文章考虑4个局部节点,每一个节点配备2D雷达.因灰色航迹关联法并不支持多局部节点,这种算法仿真结构均由2部节点下获取.各个雷达测距及测量角度误差为:

目标被模拟在2维平面存在有意和无意机动,目标初始位置处在(-25000,-25000)、(25000,25000)间按照正态分布出现,初速控制在80~460m/s之间,初始航向处在为0~2π间呈现均匀分布.关联效果必须考虑正确(Ec)、错误(Ee)及漏(Es)关联概率,三种概率相加等于1.文中仅给出正确和错误关联概率结果.
3.2分析仿真结果
图1和突2分布表示60批目标下,进行50次仿真操作后,平均正确关联率(Pc)和错误关联率曲线(Pe).
由图1-4中的仿真结果可知,中等密集目标环境下多维分配灰色航迹广联法关联效果优于灰色航迹关联法,与后者比较,前者关联性能提升8.78%.在120目标环境下前者关联性能比原始算法提升6.71%.根据表1计算的仿真结果发现,随着过程噪声加大或各种传感器滤波算法错误互联概率升高,多维分配灰色航迹关联法的稳定性明显高于灰色航迹关联法,主要因多维分配法可以直接给出准确的分配组合,有效避免航迹关联中多义性对不确定环节进行处理[8].

图1 60批目录下比较正确关联率

图2 60批目录下比较错误关联率

图3 120批目录下对比正确关联率

图4 120批目录下比较错误关联率
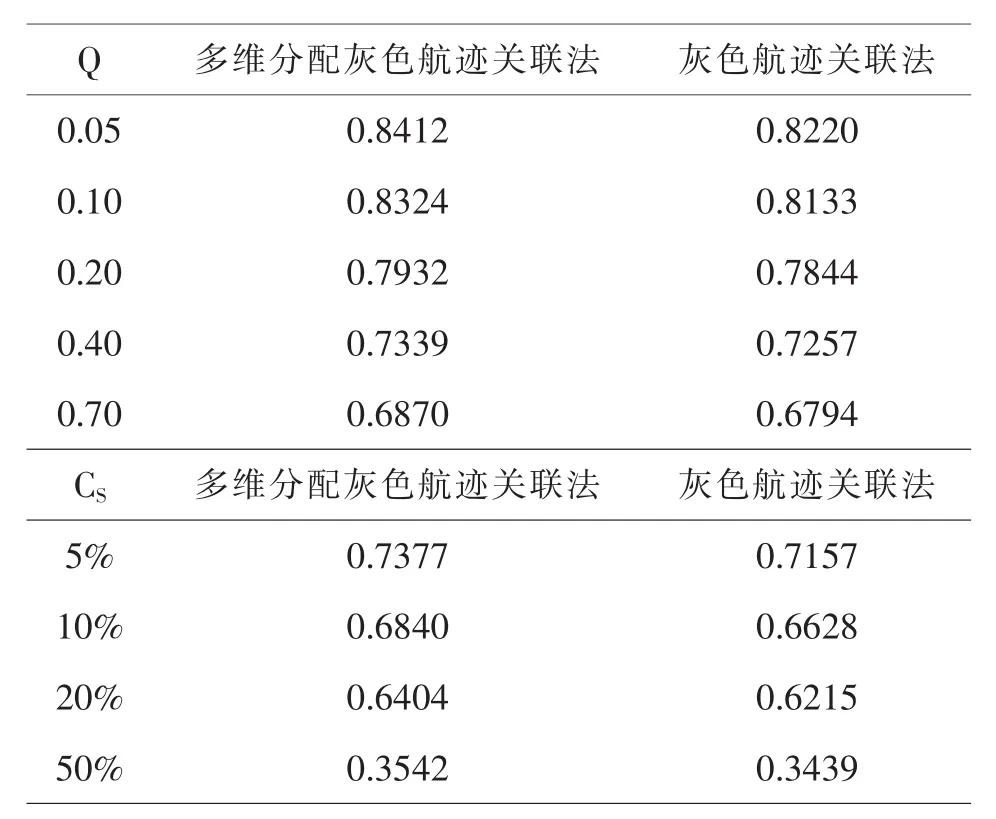
注:(Q表示过程噪声系数,CS表示错互联概率)
4 结束语
文中采用灰色理论获得分布式多传感器全局统计量,随之借助该统计量构建多维灰色相似度矩阵,通过这个矩阵组成多维分配问题获取各类传感器航迹关联结果,最终采用蒙特卡洛法对算法进行仿真检验.仿真结果证明,文中所用算法与灰色航迹关联算法比较其关联性能有所改善,算法稳定性明显提高.
〔1〕孙伟.一种多传感器融合的多维数据互联算法[J].现代雷达,2013,35(4):53-57.
〔2〕张宇,王国宏,关成斌,等.基于拓扑序列法的灰色航迹关联方法[J].电光与控制,2013,16(9):1-5.
〔3〕衣晓,张怀巍,曹昕莹,等.基于区间灰数的分布式多目标航迹关联算法[J].航空学报,2013,34(2):352-360.
〔4〕张靖,计文平,石教华,等.基于DS证据理论的灰色航迹关联技术研究 [J].中国电子科学研究院学报,2013,8(3): 240-243.
〔5〕董凯,刘瑜,王海鹏,等.基于质心参照拓扑的灰色航迹抗差关联算法[J].吉林大学学报(工学版),2015,45(4):1311-1317.
〔6〕牛曦晨,熊家军,李灵芝,等.基于小波变换和灰色关联度的航迹关联算法[J].空军预警学院学报,2014,13(2):108-110.
〔7〕李鸿艳,鹿传国,冯新喜,等.多红外传感器融合系统数据关联算法[J].红外与激光工程,2014,11(6):1801-1806.
〔8〕孔云波,王华兵,冯新喜,等.基于信息散度的雷达/红外数据关联算法[J].红外与激光工程,2014,23(11):3775-3782.
TP391
A
1673-260X(2016)07-0027-03
2016-03-19
滁州学院科研项目(2014KJ03)