三芯光纤复合海缆拉伸的有限元建模与仿真
2016-10-11卢志飞林晓波郑新龙吕安强李世强
卢志飞,林晓波,郑新龙,吕安强,李世强,张 杰
(1.国网浙江省电力公司舟山供电公司,浙江舟山 316021; 2.浙江舟山海洋输电研究院有限公司,浙江舟山 316021;3.华北电力大学电子与通信工程系,河北保定 071003)
三芯光纤复合海缆拉伸的有限元建模与仿真
卢志飞1,2,林晓波1,2,郑新龙1,2,吕安强3,李世强1,2,张 杰3
(1.国网浙江省电力公司舟山供电公司,浙江舟山 316021; 2.浙江舟山海洋输电研究院有限公司,浙江舟山 316021;3.华北电力大学电子与通信工程系,河北保定 071003)
三芯光纤复合海底电缆(简称为“海缆”)在运输、敷设和运行的过程中经常会产生拉伸的机械行为,对其进行拉伸建模仿真,可获得实体试验难以得到的应力、应变等数据。文章通过建立海缆拉伸有限元模型,模拟了海缆的拉伸过程。首先根据海缆拉伸的力学特点对结构进行简化,得到三芯海缆的几何模型;然后对其施加约束及速度载荷,控制沙漏能,仿真轴向拉伸过程;最后对数据进行有效提取和处理,获得海缆的应力与应变,为研究海缆的力学性能、判断海缆工作状态提供了参考。
三芯光纤复合海缆;拉伸;应力;应变;有限元
0 引 言
随着我国岛屿间电力网络的完善、通信需求的增大以及国际间信息化交流的发展,我国海底电缆(简称“海缆”)的用量也日益增加[1]。而海底环境的复杂性、海缆敷设不当以及人为破坏都可能对海缆的安全运行造成很大的威胁[2]。海缆在受到机械损害时通常会发生轴向拉伸,这种轴向拉伸是造成海缆机械损坏的主要原因。因此,为防止海缆破坏的发生,有必要对海缆拉伸的力学过程进行分析,了解拉伸时各层结构组件的变化趋势。
由于海缆结构复杂,体积、重量大,进行实体试验困难且成本高,因此,目前的研究都是利用数学方法进行建模仿真。华北电力大学张旭等人对单内铠光电复合海缆进行了拉伸试验仿真[3];陆莹等人通过建立简化的XLPE(交联聚乙烯)高压海缆模型,仿真分析了海缆受到外力造成损坏时,内部物理量的变化[4];武汉理工大学的李兢利用ANSYS/LSDYNA(通用显式非线性动力分析程序)对海缆的实体抗侧压模型展开了研究,对抗钩挂实体模型进行了分析[5]。以上研究为本文内容奠定了基础。
本文首先根据海缆拉伸的力学特点对海缆结构进行了简化,然后通过对海缆施加约束以及速度载荷仿真轴向拉伸过程,最后对数据进行有效提取和处理,获得海缆各层的应力与应变,为研究海缆的力学性能、判断海缆工作状态及安全预警提供参考。
1 海缆拉伸的有限元建模
1.1 海缆几何模型建立
本文采用ZS-YJQF 4 1型3 6 k V三芯XLPE绝缘光纤复合海缆。该海缆由3个线芯及外层材料构成,结构剖面图如图1所示。线芯材料包括铜导体、导体屏蔽、XLPE、绝缘屏蔽、半导电阻水带、铅合金护套和高密度聚乙烯护套;外层材料包括填充层、扎带、黄铜带、铠装垫层、钢丝铠装层和外被层。铜丝按照绞合结构生成铜导体;聚乙烯内护套和钢管组成光单元,两根光单元对称分布在填充层内;8根通信用普通单模光纤分布在钢管内;外被层涂抹沥青;钢丝以层绞的方式构成海缆的铠装层。
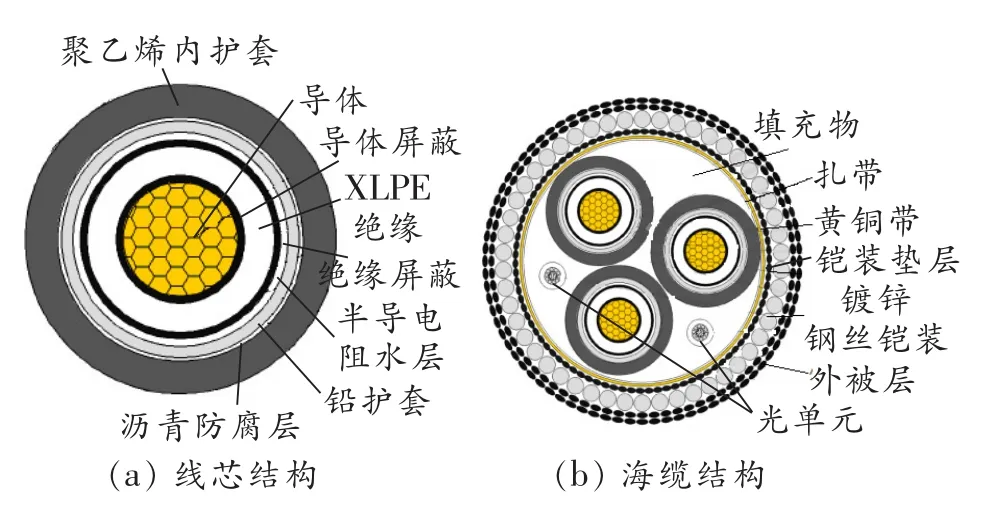
图1 三芯光纤复合海缆结构剖面图
海缆结构复杂,精确地建立海缆的几何模型十分重要。本文在尽量保证其真实结构的前提下,为降低建模难度、节约计算时间,按机械结构特点对其进行了简化,简化前后海缆的几何尺寸如表1所示。
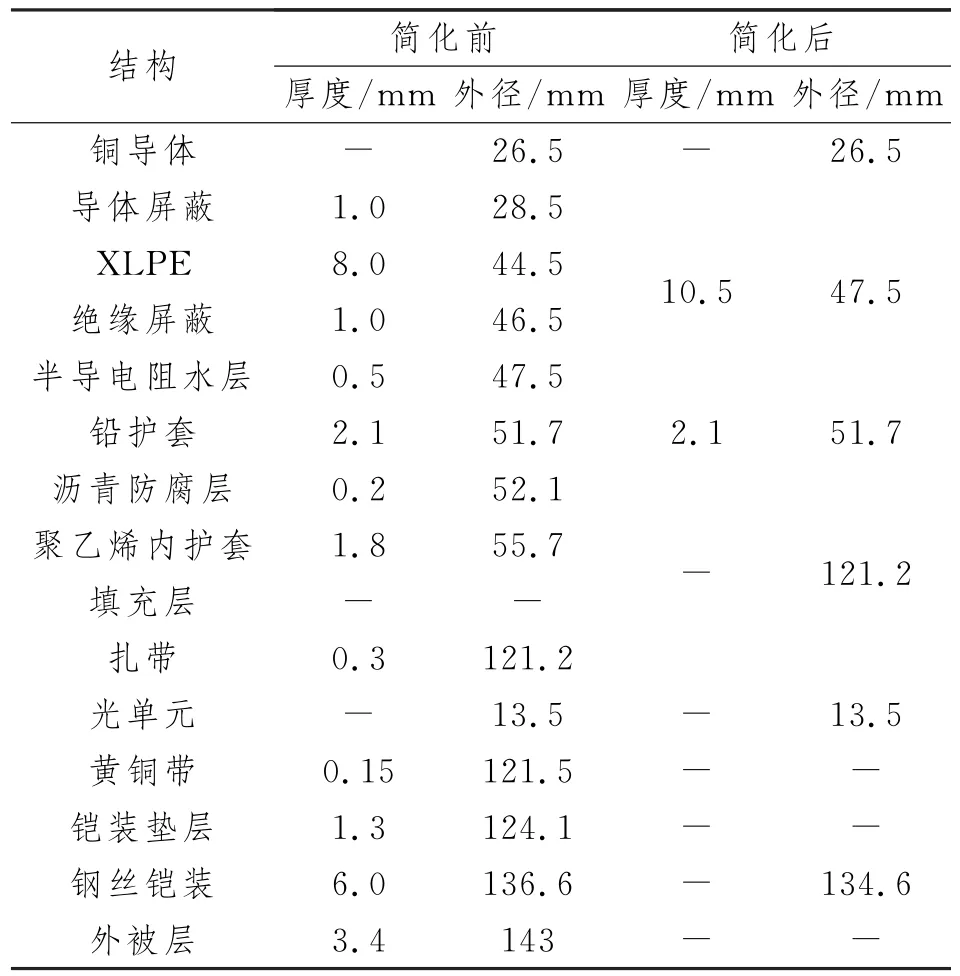
表1 海缆几何尺寸
简化过程描述如下:海缆拉伸时,由于导体屏蔽、绝缘屏蔽和半导电阻水层的厚度较小,机械性能较差,故将其合并到与之性能相近的XLPE层。填充层的材料性质决定了其仅起层间支撑作用,不参与拉伸受力。由于填充层被线芯分隔成了4部分,导致每部分的边缘尺寸很小,形状各异,很难对其进行合适的网格划分。又由于本文施加的是速度载荷,即海缆拉伸位移仅与时间有关,因此本文将HDPE(高密度聚乙烯)与填充层合并,以增大填充层边缘尺寸,降低网格划分难度,提高求解速度。黄铜带、铠装垫层和外被层的厚度较小,可以忽略。最终,三芯海缆简化为铜导体、XLPE、铅合金、光单元、填充物和钢铠。
三芯海缆的线芯、光单元和铠装钢丝均是绞合结构,不能直接生成体。本文采用点、线、面和体的思路[6],先建立三个线芯和光单元,再建立填充层和铠装,如图2所示。海缆在拉伸过程中,每个节距变化基本相同,为了节约计算时间,同时考虑模型求解的端部效应,本文取1.33个节距,最终海缆长度为187.2 cm,建成的海缆几何模型如图3所示。
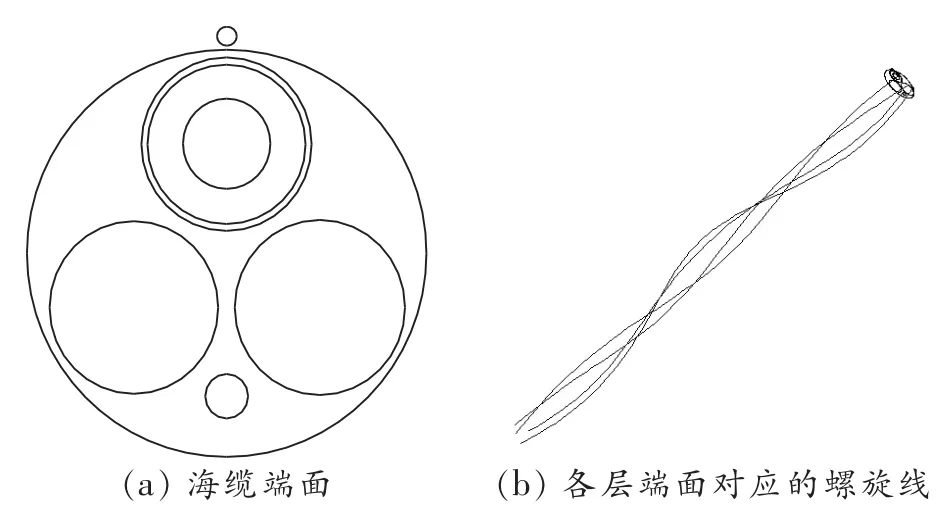
图2 海缆端面和相应的螺旋线示意图
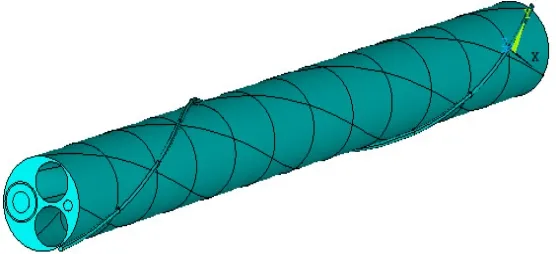
图3 海缆几何模型
1.2 海缆网格划分与创建有限元模型
铜导体、XLPE、铅合金、光单元、填充物和钢铠都是三维立体单元,在拉伸过程中会产生位移、速度和加速度的变化。SOLID164实体单元是ANSYS/ LS-DYNA的8节点六面体单元,包含位移、速度和加速度等自由度,支持所有许可的非线性特性,并支持单点积分,适合海缆拉伸力学特性分析,因此,本文选择了SOLID164单元。
铜导体、XLPE、铅合金、光单元、填充物和钢铠用的是与应变率无关的各向同性材料,而软件提供了3种与应变率无关的各向同性材料模型,这3种材料模型的应力-应变曲线都是用两条直线表达,根据硬化的假设、温度是否相关来区分。本文使用随动硬化假设,且与温度无关,认为二次屈服在2σy时出现,选取了双线性随动强化模型。
由于三芯海缆结构的特殊性,自动化分会得到较差的网格,导致计算精度降低,甚至不能完成计算。本文采用映射法实现铜导体、光单元和钢铠的网格划分,通过控制体端面上的线及轴线的尺寸来完成,而XLPE、铅合金和填充物则扫掠完成。最终,整体网格单元数量约为2.5万,在保证计算精度的前提下,有效地提高了计算速度。
1.3 载荷施加、约束与接触控制
在海缆拉伸模型中,将海缆的左端面定义成组件,定义不同的时间以及对应速度载荷值的数组参数,最后将载荷施加到该组件上。
在做拉伸实验时,将海缆的左端面固定,即对该截面上的所有节点施加所有方向上的约束。由于三芯海缆多是绞合层,拉伸会产生缆体的扭转。若不加控制扭转角度太大,会导致海缆发生严重穿透,影响实验的准确性。实际中的海缆很长,中间的一小段被拉伸后,通过对两侧海缆的约束使缆体扭转角度较小,可忽略不计。本文对右端面进行零约束处理,也就是控制右端面在X、Y方向上的位移。
海缆在拉伸过程中,层与层的接触会导致穿透,影响实验的准确性。而在接触分析中,由于海缆拉伸过程的复杂性,判断接触方向很困难,因此本文使用了接触中的自动接触。
1.4 沙漏能控制
三芯海缆结构复杂且特殊,拉伸时网格会产生大变形,严重时变形呈现锯齿形网格,出现零能模式,这会导致从一开始沙漏能便大于内能的10%。为确保分析的准确性,本文采用了尽可能使用均匀网格划分、避免在单点载荷、全局调整关键字* CONTROL_HOURGLASS(设置整体的沙漏公式和沙漏系数)、控制参数为IHQ(定义沙漏粘性属性)与QH(定义沙漏系数)等方式控制沙漏能。全局调整后XLPE、铅合金、光单元和填充物的沙漏能基本控制在1%以内。
2 有限元仿真结果与分析
2.1 仿真结果评价
求解海缆拉伸的有限元建模,得到海缆在拉伸后的位移图,如图4所示。海缆在拉伸过程中,左端面的位移最大,与本文所施加的载荷产生的位移相符。海缆的右端面没有位移,符合施加的端面约束(ALL DOF)。海缆在受到轴向速度载荷后,整体直径变小。
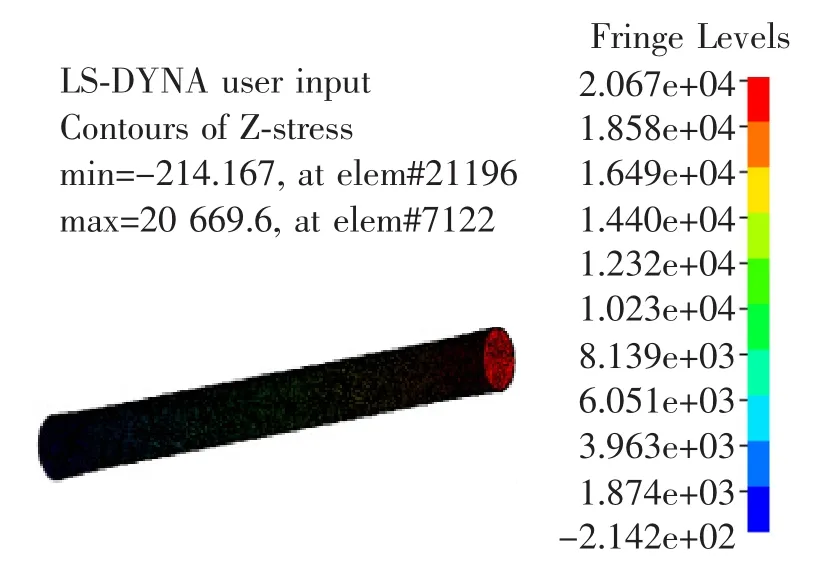
图4 海缆拉伸位移图
另外,沙漏能是衡量仿真正确性的重要指标,准确的仿真应保证沙漏能不超过内能的10%[7]。本文中的沙漏能控制在内能1%以内,保证了实验的准确性。内能-沙漏能时间曲线如图5所示。
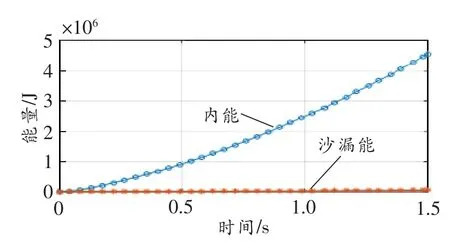
图5 内能-沙漏能时间曲线
2.2 仿真数据分析
海缆结构复杂,各层材料参数各不相同,因此在拉伸过程中各层的应变和应力也不同,提取铜导体和光单元的应变,如图6所示。
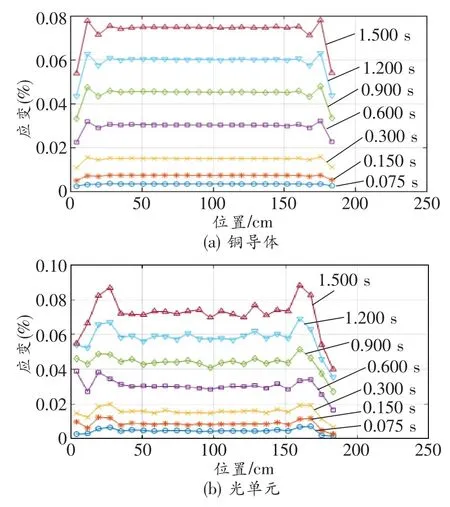
图6 铜导体和光单元的应变曲线
由图可知,拉伸过程中,导体和光单元两端的应变变化幅度比较大,中间部分应变分布基本保持水平,这是由于本文施加了匀速载荷。在模型端部,载荷直接作用,因此会出现应力波动,而传递至中部后应力变化较平缓,因此应变分布均匀,这与海缆拉伸的实际相符。海缆在右端面固定后,施加速度载荷,海缆每一层在不同位置拉伸位移一样,故应变也应一样,随着位移的增加,海缆应变增加,与图6一致,符合实际的海缆拉伸模型。
铜导体和光单元的应力-应变曲线如图7所示。从图中可以看出,在拉伸过程中,铜导体的应力随应变的增大而上升,在0~0.003 s期间,铜导体的应变随应力以斜率6.7E5增加,而在0.003 s后,斜率比之前降低,但仍然是线性增长。光单元的应力也随应变的增大而增大,在0~0.05 s期间,斜率较大,而在0.05 s后,斜率变小,应力随应变变化减慢,符合弹塑性材料特性。光单元内复合有光纤,当光单元的应变增加到足以消耗掉光纤的余长后,光纤开始受力,并产生应变。
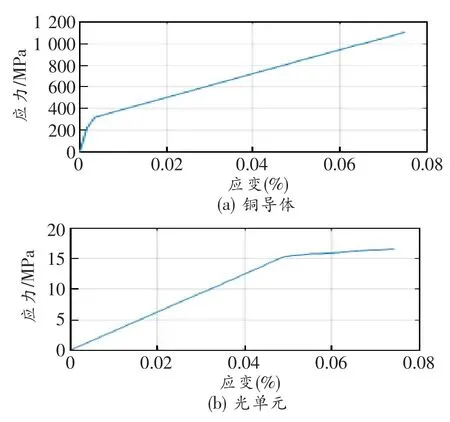
图7 铜导体和光单元的应力-应变曲线
3 结束语
本文对海缆拉伸的机械行为进行了有限元建模和仿真。通过分析实验数据可以看出,海缆不同层的应变、应力不一样。拉伸过程中,铜导体和光单元的应力在开始阶段都随应变的增大而线性增大,在应变达到一定数值后,应力随应变的变化减缓,即斜率降低,符合材料特性。本文提供了三芯海缆拉伸有限元模型的建立和求解方法,为进一步研究海缆力学性能、判断海缆工作状态提供了参考。
[1] 顾玉娟.海底电缆的安全性探讨[C]//救捞专业委员会2003年学术交流会论文集.上海:中国航海学会救助打捞专业委员会,2003:126-127.
[2] 张国光.海缆安全及其施工埋设技术研究[J].海洋技术,1992,(1):64-73.
[3] 张旭,尹成群,吕安强,等.光电复合海缆有限元建模与仿真[J].计算机仿真,2013,(2):120-124.
[4] 陆莹,黄辉.基于分布式光纤传感技术的高压海缆外力损坏仿真[J].电气技术,2012,(12):87-89.
[5] 李兢.海底光缆力学特性有限元分析[D].武汉:武汉理工大学,2009.
[6] 吕安强,李永倩,李静,等.用光纤应变判断光电复合海缆锚害程度的有限元分析法 [J].电工技术学报,2014,(11):261-268.
[7] 白金泽.LS-DYNA 3D理论基础与实例分析[M].北京:科学出版社,2005:167-168.
Finite Element Modeling and Simulation of Three-core Optical Fiber Composite Submarine Cable Stretching
LU Zhi-fei1,2,LIN Xiao-bo1,2,ZHENG Xin-long1,2,LüAn-qiang3,LI Shi-qiang1,2,ZHANG Jie3
(1.State Grid Zhoushan Electric Power Supply Company of Zhejiang Power Corporation,Zhoushan 316021,China;2.Zhejiang Zhoushan Marine Power Research Institute Co.,Ltd.,Zhoushan 316021,China;3.Department of Electronic and Communication Engineering,North China Electric Power University,Baoding 071003,China)
Three-core optical fiber composite submarine power cable is often stretched in the process of transportation,installation and operation.The stress and strain data can be obtained by the simulation of stretching modeling,which is difficult to be obtained in the entity experiment.In this paper,the finite element model of the submarine cable is established,which is used to simulate the stretching process.We first simplify the structure of the submarine power cable according to the mechanical characteristics of stretching.The constraint,speed loads and hourglass control are then imposed to simulate the axial stretching process.Finally,the stress and strain data of the finite element model is extracted and processed to obtain the stress and strain of the submarine cable.The results provide reference for the study of mechanical properties and operating condition judgement of the submarine power cable.
three-core optical fiber composite submarine cable;stretch;stress;strain;finite element
TN818
A
1005-8788(2016)03-0029-04
10.13756/j.gtxyj.2016.03.010
2015-12-23
国家自然科学基金资助项目(51407074);河北省自然科学基金资助项目(E2015502053);中央高校基本科研业务费专项资金资助项目(2015ZD21)
卢志飞(1986-),男,浙江建德人。工程师,工学硕士,主要从事海底电缆运行维护技术方面的研究。
