超大型风电安装船的操纵性和动力定位能力分析
2016-10-11屠海洋王思铭高家镛张甫杰
屠海洋, 王思铭, 高家镛, 张甫杰
(1.上海船舶运输科学研究所 航运技术与安全国家重点实验室,上海 200135;2.南通中远船务工程有限公司,江苏 南通 226005)
超大型风电安装船的操纵性和动力定位能力分析
屠海洋1, 王思铭2, 高家镛1, 张甫杰1
(1.上海船舶运输科学研究所 航运技术与安全国家重点实验室,上海 200135;2.南通中远船务工程有限公司,江苏 南通 226005)
以超大型自航自升式海上风电安装船MPI ADVENTURE为研究对象,对超大型船的操纵特性及其动力定位系统的定位能力进行分析。首先对代表船的结构参数和功能特点作简要介绍;然后分析指出以全回转推进器为动力的风电安装船在自航操纵方面的特点,采用MARI DPCap软件计算该船在不同推进器失效状态下的动力定位能力;最后得出该船的定位能力满足设计要求且具有一定冗余的结论。该分析对进一步了解目前最新型的风电安装船的性能特点具有一定帮助。
水路运输; 动力定位; 操纵性; 定位能力; 风电安装船
Abstract: The object under research is the ultra large wind turbine installation vessel MPI ADVENTURE. The work focuses on the maneuverability and Dynamic Positioning(DP) capability of the vessel. The structural parameters and functional characteristics of the vessel are briefly introduced first and the maneuverability characteristics of this type vessel are analyzed. The DP capability of the vessel in diffrent failure states of the propellers is calculated. It is concluded that the DP capability of the vessel meets the design requirements with certain margin. The study gives us the knowledge about the performance characteristics of the most new type of wind turbine installation vessels.
Keywords: waterway transportation; dynamic positioning; maneuverability; capability for positioning; wind turbine installation vessel
风能作为新型绿色能源,是目前最具工业开发规模的可再生能源。海上风电资源丰富、风速稳定、对环境的负面影响较小,早已成为世界清洁能源发展的重要领域。加快发展海上风电将成为能源战略上的一种必然选择。海上风力发电机安装作业平台作为风力发电技术的重要设备,在海上风电发展方面有着举足轻重的作用。
海洋风车安装船是一种全新的海洋工程船,主要用于运输和吊装海上风力发电机。其融合了运输船、海上作业平台、起重船和生活供给船的各项功能,并装有先进的动力定位系统和自动控制系统,操作灵活,可独立完成风力发电机的运输和安装作业,全程无须其他船舶协助;此外,其还可通过自升工作平台至水面以上,克服普通工程船工作环境不稳定的缺点。但是,平台所经受的海洋环境复杂,其在运输和就位过程中及风暴自存状态下的载荷与动力响应严重影响着其工作效率和安全性。目前针对该类船舶的研究主要集中在全船结构强度分析和桩腿动力分析上,对其自航特性、动态定位过程及定位能力特性的研究较少。
这里以南通中远船务为荷兰VROON公司设计建造的自升自航式超大型海上风电安装船MPI ADVENTURE (见图1)为研究对象,对该船的结构参数和功能特点作简要介绍,并根据船舶的实际情况对满载航行时的操纵特性和就位过程中不同状态下的定位能力进行综合分析,供该类船舶的设计者和管理者参考。

图1 自升自航式超大型海上风电安装船MPI ADVENTURE
1 超大型自航自升式风电安装船的特性与功能
1.1船舶的基本参数[1]
主要对船舶参数、推进器参数及船舶设计要求作简要介绍,分别见表1~表3。
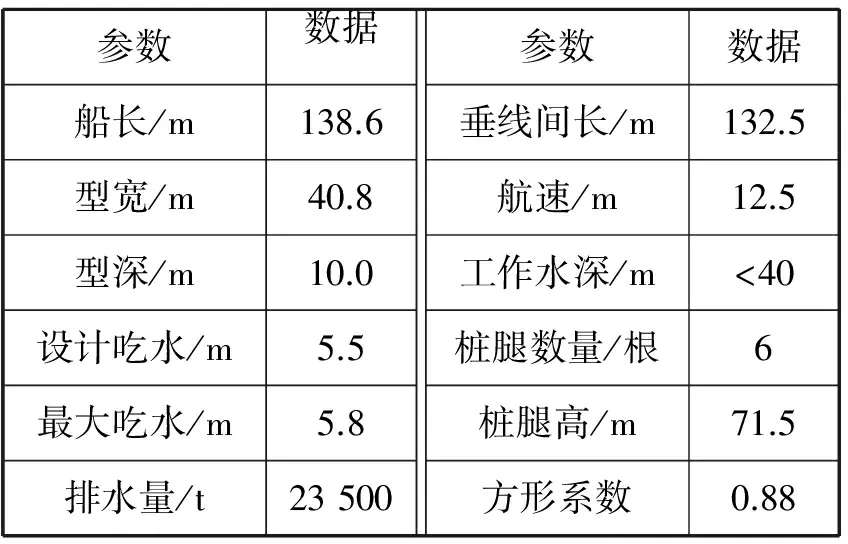
表1 船舶参数
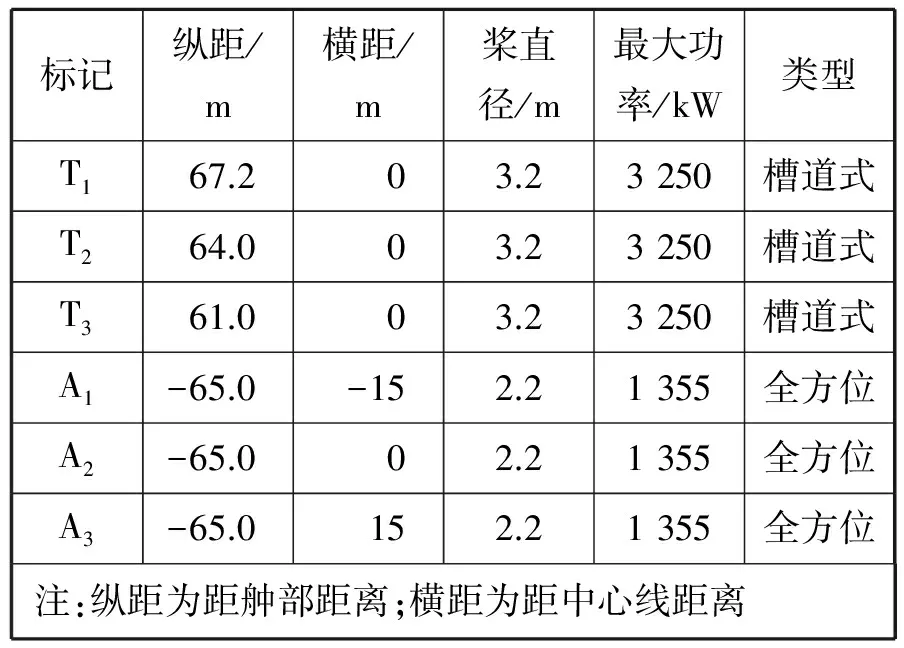
表2 推进器参数
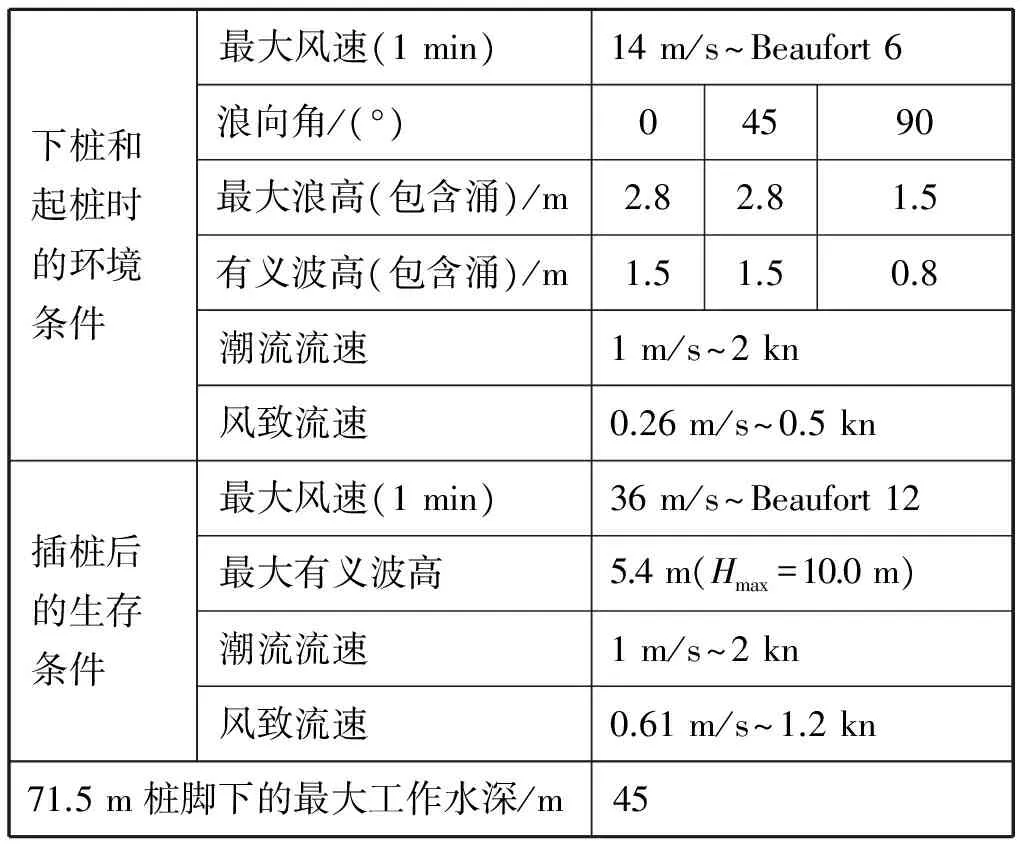
表3 船舶设计要求
1.2船舶的功能特点
由于海上风电机组对工作环境有一定要求,因此风力发电机安装作业平台往往在风浪较大的海上风电场区域作业,所遭受到的风、浪、流较为复杂,载荷也较大。作为集装载运输、自航自升、重型起重、动态定位和海上作业等多种功能于一体的自航自升式风电安装船,其主要有以下几个特点。
1)具有普通船的优点,无须拖船辅助,工作效率高、造价低,能独立完成海上作业。
2)具有自升式平台的优点,海上作业时桩腿插入海底,平台主体被抬升至水面以上,可提供稳定的作业环境。
3)具有宽大的甲板空间,能放置海上施工设备,通用性较好,能完成多种海上作业。
4)平台灵活、机动性较好,可在短时间内断开与其他海上工作物的联系,有利于在恶劣风浪到来之前及时、迅速撤离现场,避免不必要的经济损失。
5)能在4.8 m浪高和14 m/s风速条件下完成海上风电机组的高精度吊装。
6)装有DP-2级动力定位系统,可在不用锚的情况下保持自动浮式准确定位及实现测量系统、控制系统和动力系统的有机集成。
7)平台具有较好的操纵性,无须外力协助,可原地掉头,靠离泊方便、灵活。
2 超大型自航自升式风电安装船的操纵性分析
该船是海上风电运输与安装的专用船舶,航行中靠安装在艉部的3台全旋回推进器提供动力,这使得其具有优异的操纵性能。但是,该船的操纵模式[2]与传统的定距螺旋桨舵叶船舶完全不同,正确掌握其操纵性能和推进器间的组合操纵是保证该船安全航行的关键。操纵习惯上的不同主要体现在以下几个方面。
1)推进器的方向控制手柄与推进器是同步、同方向转动的,手柄向右旋转,则对应的螺旋桨也同步向右旋转,产生的推力致使船首向左转动。
2)船舶在航时一般采用随动控制工作模式。由于船舶转向是靠转动推进器实现的,因此船舶高速航行时转角太大可能会造成较大横倾及损坏推进器。传统的船舶操纵舵令和车钟令不适合该类船舶。
3)该船的操纵有独立机动和航行两种模式,其中独立机动模式主要用于低速下的掉头、靠离泊和定位,通过各推进器的协调作用使船舶完成微速前进和后退、原地旋回及横向移动等动作。
本船属于浅吃水肥大型船,具有良好的回转性,但低速直航时航向稳定性较差,需要通过适当转动推进器的角度来调整航向和航迹。由于船舶较宽,因此其横摇和纵摇的大小对甲板货物的安全有较大影响。研究报告[1]表明,航速和水深对平台的运动响应影响很大。图2为船舶不同航速下的纵摇运动曲线。
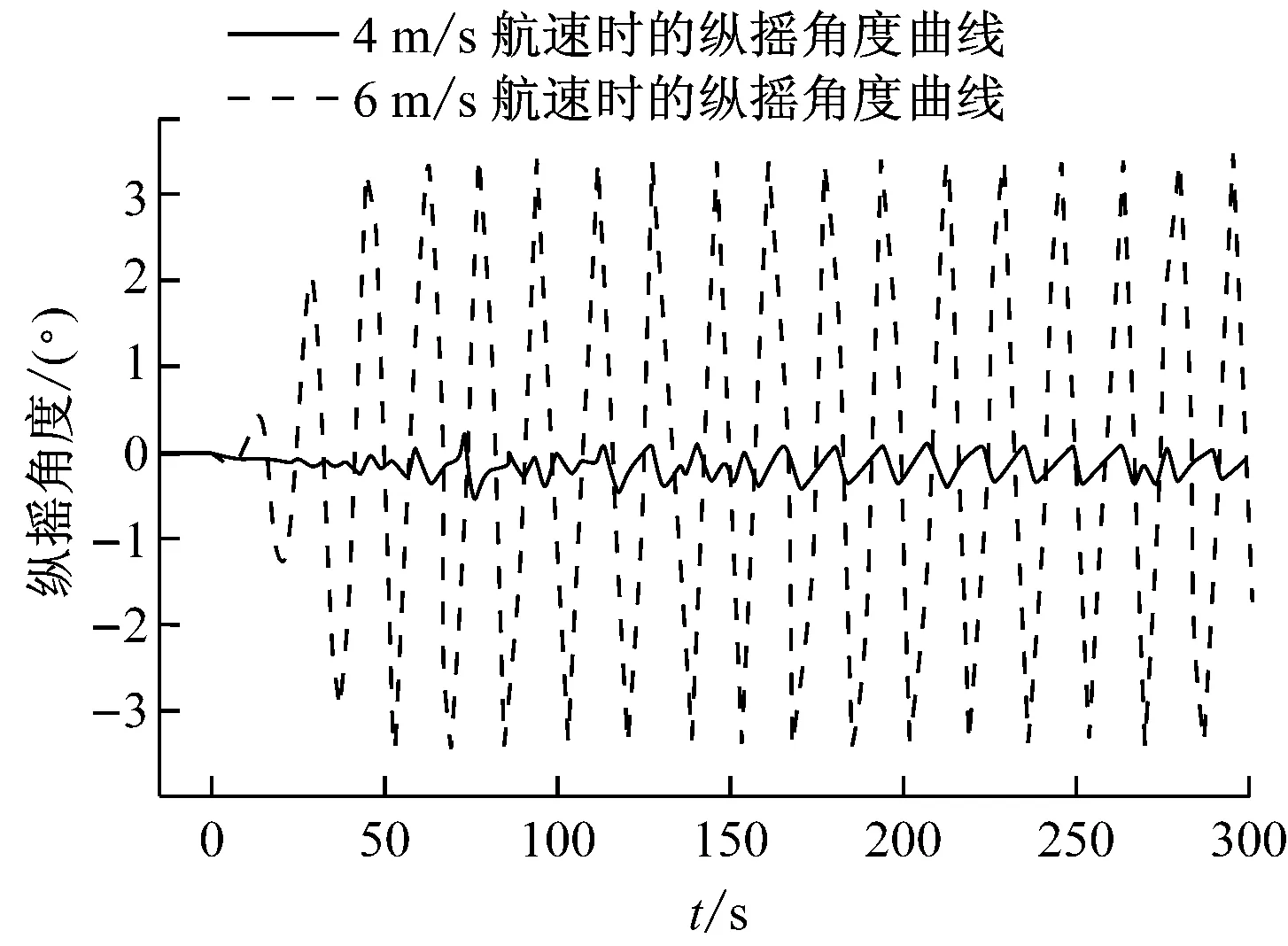
图2 不同航速下的纵摇运动
从图2中可看出,为保证船上风力发电机的安全,可通过适当减小航速来改善船舶的摇荡性能,但船速不能过低,否则会引起较大的纵荡和纵摇。
3 超大型自航自升式风电安装船的动力定位能力分析
动力定位能力是指装有动力定位系统的船舶或平台在给定的工作环境下保持位置不变的能力。[3-4]其不仅可以作为动力定位的评价标准,而且能为优化推力系统设计提供依据。
该船除了具有自航能力之外,还有动力定位能力,能使船舶准确地将桩腿插入设定的海底后升出海面,避免浪和流的影响,为快速、安全地安装海上风力发电机创造条件。当动力定位系统出现故障或维修时,会导致部分推进器停止工作,进而对船舶的动力定位能力产生一定影响。因此,为保证船舶能在设计海况条件下保持在某一位置上,其动力系统除了具备设计工况要求的参数之外,还要有一定的推力冗余。美国石油学会(American Petroleum Institute,API)规范给出的建议是以最大推力的20%作为推力冗余,推力器的最大推力取为极限推力的80%。分析船舶在不同动力失效状况下的最大定位能力对船舶的安全生产有一定帮助,有利于操作人员在生产过程中作出正确判断。
3.1不同推力失效情况下的动力定位能力计算
该船的动力定位能力为DNV DYNPOS AUTR,即DP-2。 根据DP-2的要求[4-5],安装有DP-2动力定位系统的船舶在出现单个故障(例如传感器、控制电板、控制阀、单个推进器及发电机等)时,可在规定的环境条件下在规定的作业范围内自动保持位置和艏向。因此,除了选定所有推进器处于正常工作状态之外,还选取可能出现单个故障的几个系统状态对其进行定位能力分析,具体如下(为方便说明,各动力表示见图3)。

图3 推进器的位置示意图
1)完整模式:所有推进器正常工作。
2)失效模式一:T1号推进器失效——单个侧推器失效下的情况。
3)失效模式二:A2号推进器失效——单个推进器失效下的情况。
4)失效模式三:T1号和A1号推进器失效——2个推进器失效下的情况;
利用荷兰航海研究所开发的动力定位计算软件MARI DPCap进行计算。在计算动力定位能力之前,要对不同的定位状态进行建模。由于DPCap系统已在其数据库中保存计算所需的系数(也可自定义风、浪、流计算系数),因此建模过程比较简单。各工况输入的数据主要有船舶参数、环境参数和动力参数。根据软件界面要求输入船舶设计数据,其中:各结构的受风面积和形状系数见表4,风浪关系见表5。在动力栏中输入相应的艏侧推器和艉部全方位推进器对应的数据。

表4 各结构的受风面积和形状系数

表5 风浪关系
输入船舶、环境和动力数据之后,软件即可进行定位能力计算,计算结果见图4~图7,其中:轴向风速单位为kn,风浪流假定为同向;根据船舶设计的要求,潮流流速分别取1.0 kn,1.5 kn和2.0 kn;浪高值是软件根据风速大小自动取的值。
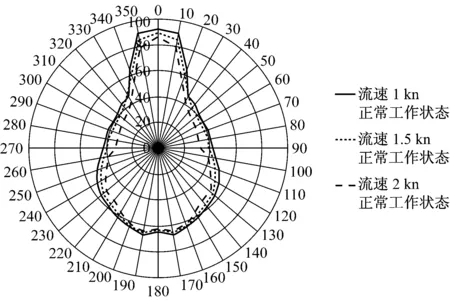
图4 完整模式不同流速下的定位能力图
3.2超大型风电安装船动力定位能力分析
一般利用船舶不同状态下的动力定位能力曲线(如图4~图7)对动力定位能力进行分析。该曲线是一条在极坐标上从0°~360°的封闭包络线,曲线上的半径坐标表示该舷角下船舶能定位的最大风速。定位能力曲线在船舶实际操作中具有极其重要的作用,能明确显示船舶在不同状态下的定位能力,有助于操作人员在船舶定位之前和定位过程中作出正确的判断。
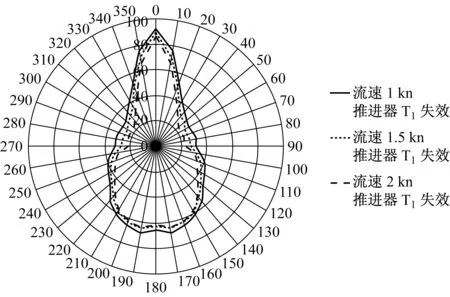
图5 单个艏侧推器T1失效下的定位能力图
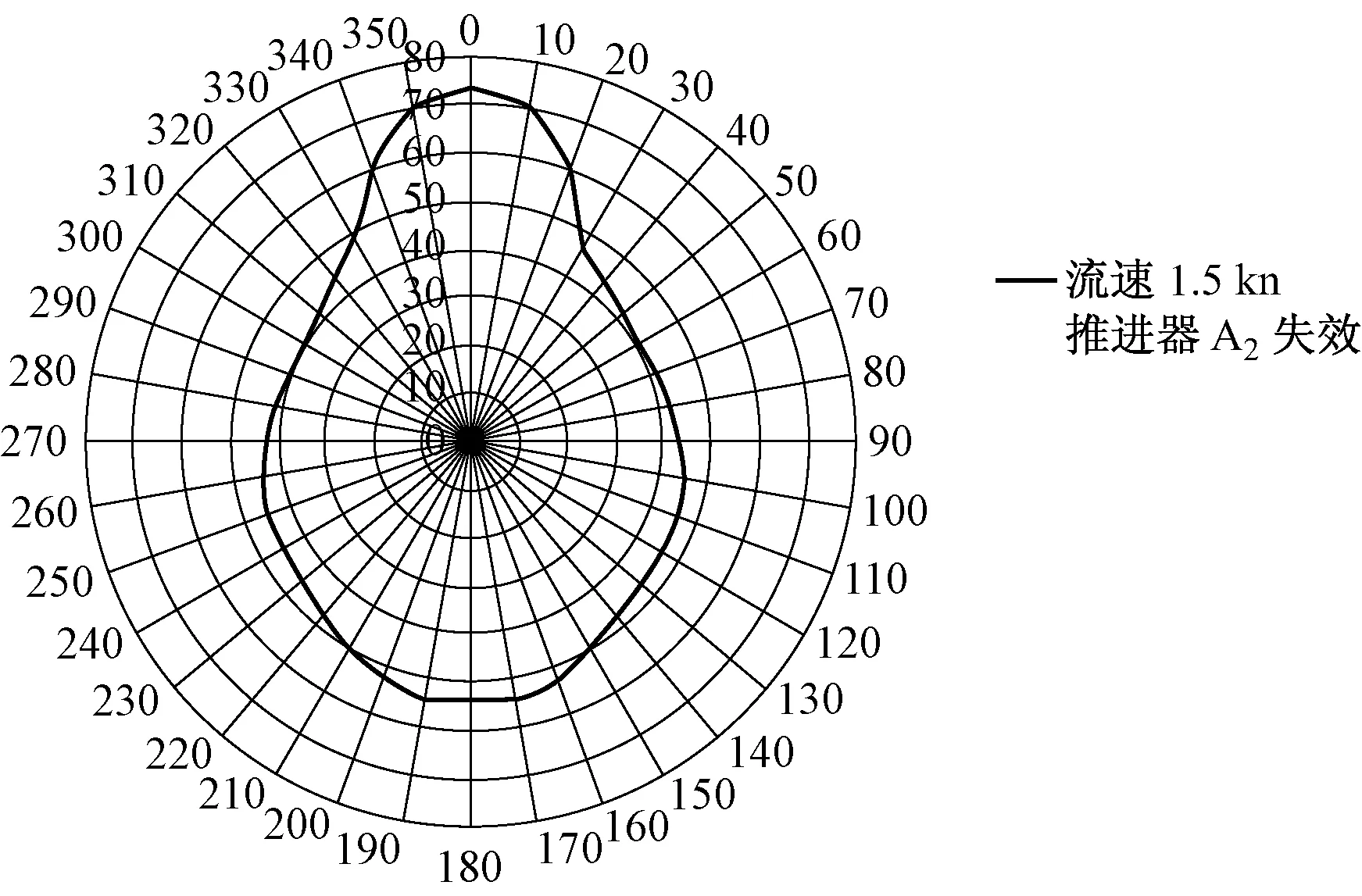
图6 单个推进器A2失效下的定位能力图

图7 推进器T1和A1同时失效下的定位能力图
3.2.1推进器完整状态下的定位能力
该船在流速为2.0 kn,风速<32 kn时,具有全方位控位能力;在风速为60 kn时,其控位风舷角在艏部±15°之间和艉部±20°之间;在风速为80 kn时,只有顶风流状态下才可控位。即在6级风、2 kn潮流以下,船舶能全方位定位;在顶风状态下,船舶能顶住80 kn的飓风保持船位不动。由以上分析可知,流速变化对船舶的定位能力影响较小,影响较大的是风速和风舷角(风舷角在30°~100°时影响较大)。
3.2.2单台艏侧推器失效状态下的定位能力
艏部安装完全相同的3台隧道式侧推器,纵向排列,考虑到转艏作用的大小,取离舯部最远的侧推器T1失效时的状态进行动力定位能力分析。经过计算,可得不同流速下的定位能力曲线图(如图5所示)。由该图可知,在流速为2.0 kn,风速<22 kn时,该船具有全方位控位能力;在风速为60 kn时,其控位风舷角为艏部±15°和艉部±20°之间;在风速为80 kn时,其控位能力只有在风舷角±10°之间才行。风力继续增强,船舶将失控并发生漂移。
3.2.3单台艉推进器失效状态下的定位能力
艉推进器为3台全回转式推进器,横向排列,转向灵活。3台推进器在纵向和横向上产生力的能力是相同的,但同样的力对船的转弯力矩不同,A1或A3失效会使船舶定位能力曲线左右不对称。在不对称失效的情况下,容易使一些特定方向上保持定位所需的推力器最大推力变大,造成该方向上的定位能力减弱,进而导致船舶的定位能力减弱。从图6中可看出,在单台艉推进器失效的情况下,船舶在1.5 kn流中的最大全方位定位能力仍达到38 kn风,比单个艏侧推器失效时的定位能力要强。随着流速增加,船舶定位能力下降。
3.2.4艏艉各一台推进器失效状态下的定位能力
在该条件下,船舶的艏艉动力都损失1/3,船舶的定位能力大幅度下降。在1 kn流中,船舶只有在<6级风的条件下才能达到全方位定位;而在2.0 kn流中,船舶的最大全方位定位能力只能达到18 kn风。因此,船舶在该状态下无法满足设计条件下的定位能力要求。
由以上分析可知:在动力完整的情况下, 船舶在2 kn流、32 kn风以下状态下有全方位控位能力;在单个推进器失效的情况下,船舶的控位能力下降,但仍能在2 kn流、22 kn风或1.5 kn流、26 kn风中全方位控制船位;在双推进器失效的情况下,船舶的定位能力无法达到船舶设计要求。由于船舶顶风状态下的控位能力优于其他状态,因此船舶在大风中尽量采用顶风或偏顶风定位,以利于安全。
总体而言,MPI ADVENTURE船的动力定位能力达到了设计要求,能在设计的海况下进行定位,且有一定的冗余。但在某台推进器失效的状态下,船舶定位的冗余度不大,需要及时修复失效推进器,避免其他推进器长时间高负荷运行。
4 结束语
以MPI ADVENTURE为研究对象,分析超大型自航自升式风电安装船的航行和操纵特点;考虑到DP-2级动力定位系统对冗余度的要求,计算不同状态下单台推进器失效情况下的船舶动力定位能力,并对结果作一定的分析。由计算结果可知,船舶能在设计要求的环境下产生足够的推力来抵抗风、浪和流等3种环境载荷,能有效定位且具有一定的冗余。
[1] 超大型海上风电安装作业平台海洋环境载荷与运动特性分析研究报告[R].南通:南通中远船务责任有限公司,2014.
[2] 黄海曦,陆悦铭.全旋回推进器船舶的引航操纵[J].水运管理,2014,36(5):16-18.
[3] 李军,方泉根,龚少军.海工船动力定位能力分析系统研究与应用[J].中国航海,2014,37(1):120-125.
[4] 张本伟,杨鸿,陈瑞峰,等.动力定位控位能力分析方法探讨[J].中国造船,2009,50(S):205-214.
[5] 马超,庄亚峰,陈俊英.船舶动力定位系统技术[J].中国造船,2009,50(S):52-57.
AnalysisofManeuverabilityandDPCapabilityforUltra
LargeWindTurbineInstallationVesselTUHaiyang1,WANGSiming2,GAOJiayong1,ZHANGFujie1
(1. State Key Laboratory of Navigation and Safety Technology, Shanghai Ship and Shipping Research Institute, Shanghai 200135, China; 2. COSCO (Nantong) Shipyard Group Co. Ltd, Nantong 226005, China)
2016-01-26
江苏省科技成果转化专项资金(BA2011005)
屠海洋(1967—),男,浙江上虞人,研究员,硕士生导师,从事船舶航行安全与智能航海方面的技术研究。 E-mail:oceantu@126.com
1000-4653(2016)01-0074-05
U661.7
A
