旋转激光经纬仪空间定位网络的组合式激光三维扫描系统
2016-09-29方红根郭立杰杨晓慧刘志刚董丰波杨天豪
方红根,郭立杰,杨晓慧,张 欢,刘志刚,聂 斌,董丰波,杨天豪
旋转激光经纬仪空间定位网络的组合式激光三维扫描系统
方红根1,郭立杰1,杨晓慧1,张 欢2,刘志刚2,聂 斌1,董丰波1,杨天豪1
( 1. 中国航天科技集团公司第八研究院上海航天设备制造总厂,上海 200245;2. 西安交通大学 机械制造系统国家重点实验室,西安 710054 )
研究了一种基于旋转激光经纬仪三维空间定位网络的组合式激光三维扫描系统。旋转激光经纬仪定位系统的空间定位结合激光经纬仪前方空间角度交会和GPS空间定位原理,实现并行测量多个光电传感器空间坐标。在此基础上,设计了一种组合式激光三维扫描系统,通过三个光电传感器坐标确定激光测头的空间测量位姿,实现了一种适用于现场测量便携式三维扫描系统。研制的组合式三维激光扫描装置对多个物体进行扫描获取物体表面特征点云数据,得到了较好效果。
旋转激光经纬仪网络;组合式三维激光扫描;现场标定;姿态测量
0 引 言
组合式大尺寸空间测量系统结合大尺寸全局空间定位与测量末端局部高精度测量各自优势,已经在工业现场测量、建筑、考古、工业设计等领域开展了广泛的应用。例如,由Leica激光跟踪仪和手持式接触测头、激光扫描测头组成的扫描系统[1-3]。然而,激光跟踪仪价格昂贵,一次仅能跟踪一个目标点,而且测量过程中存在断光等问题,测量效率不高[4-5]。面向飞机装配、造船业、航天制造等行业发展而来的室内光学GPS技术已经在飞机装配等领域得到了应用,其基本原理是结合空间角度交会测量和GPS空间定位原理的新型非正交坐标测量系统[6]。测量系统由旋转激光自动经纬仪(简称激光发射机)组成空间定位网络,每台发射机发射两个扇形光平面,并绕转轴高速旋转,使两个扇形光平面对整个测量空间进行扫描,激光信号采用具有特定几何形状的光电传感器接收,根据空间角度前方交会原理确定光电传感器的三维空间坐标。测量过程中多个光电传感器可同时接收信号,实现超大尺寸范围内低成本在线精密定位与坐标测量[5,7]。Nikon公司的Indoor GPS(iGPS)、国内天津大学研制的wMPS系统,西安交通大学研制的旋转激光经纬仪定位网络均是基于这一原理开发的室内GPS定位系统[8-9]。本文构建了一个由四台发射机(旋转激光经纬仪)组成的三维空间定位网络单元,设计了一种组合式激光三维扫描系统,实现了一种适用于现场测量无导轨三维扫描系统。研制的组合式三维激光扫描装置对多个物体进行扫描获取物体表面特征点云数据,得到较好效果,验证了基于旋转激光经纬仪网络的组合式测量系统可现场用于大型物无导轨三维扫描测量。
1 旋转激光经纬仪网络空间定位系统
1.1 网络定位模型
旋转激光经纬仪定位系统一般是由四台发射机组成的一个测量单元,每台发射机发射出两个扇形激光平面,在伺服电机驱动下360°扫描测量空间。多台发射机构成了旋转激光经纬仪定位系统的测量网络。具有特殊几何形状的光电传感器接收来自不同发射机的激光扫描信号,经过信号提取、调理、辨识、空间定向角度计算,得到光电传感器的空间三维坐标数据,如图1所示。

图1 旋转激光经纬仪定位网络原理图
测量系统中激光发射机的几何模型如图2所示,两个扇形激光平面同时汇交于旋转轴上一点,设为点,两扇形激光平面分别标记为1,2。使用以下方法建立一个发射机坐标系:选点作为坐标系原点、旋转轴作为轴,、轴在构建坐标系时待定。
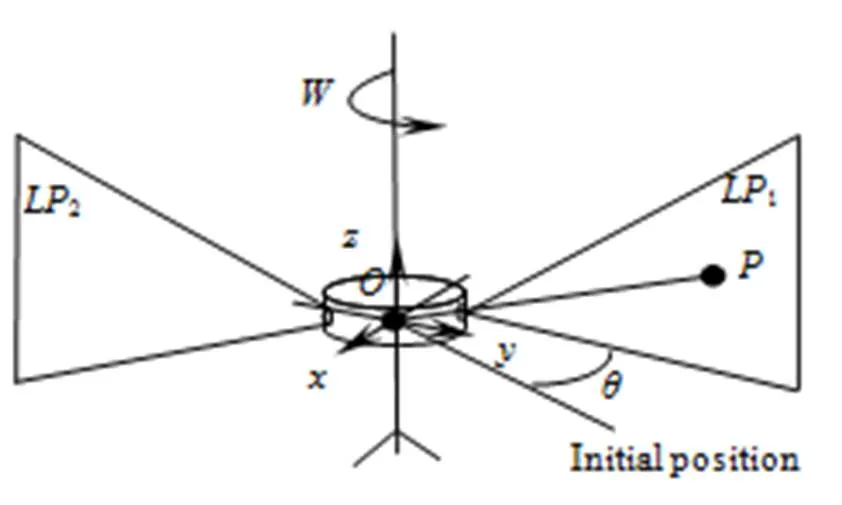
图2 发射机几何模型
在发射机坐标系下,激光平面1,2的初始法向量分别为、。当激光平面绕轴旋转时,两个激光平面会先后扫过测量空间中布置的光电传感器,设两个激光平面相对初始位置的旋转角度分别为和,则这两个激光平面通过点时的两个激光平面方程为
其中:为待测点坐标,为发射机坐标系原点坐标,通过点时,激光平面的法向:
平面1和2依次扫描过点,发射机坐标原点与点连线方程可通过求解式(3)中两激光平面方程组求得:
为了得到待测点的三维空间坐标,需要至少两台以上的发射机,该系统使用了四台发射机作为一个测量单元,相当于用四条空间直线去求解待测点。如图3所示,由于四台发射机各自都建立了一个坐标系,需要将各台发射机坐标系变换到世界坐标系中。设点是世界坐标系下的坐标点,各发射机坐标系到世界坐标系下的坐标转换分别为(=1,2,3,4)。第台发射机第个激光平面在世界坐标系的方程为
其中:=1,2,3,4;=1,2。是第台发射机第个激光平面在发射机坐标系下的法向量,是激光平面扫描过点时相对零位旋转的角度,是转换到世界坐标系对应的旋转矩阵和平移矩阵。对于四台发射机,在世界坐标系下8个激光平面扫描通过点的方程组为
得到待测点的坐标值。

图3 旋转激光经纬仪定位系统测量原理示意图
1.2 标定算法
在旋转经纬仪定位网络中,每个发射机共有12个未知变量。在发射机测量模型中,发射机坐标系的轴固定在发射机旋转轴上。对发射机,当已知标定点有(>6)个三维坐标的标定数据,标定数据包括标
式的标定方程组如下:
标定点的坐标可以通过将传感器固定在一个三坐标测量平台上,使用三坐标测量机的坐标系作为世界坐标系,那么点的坐标可直接从三坐标测量机上直接获取,也可以采用激光跟踪仪间接测量光电传感器的空间坐标作为定位网络标定数据。而每个标定点位置光电传感器对应的旋转激光平面空间角度可以根据扫过的时间与发射机转速乘积确定。对于由四台发射机构成的定位网络,待标定的参数可通过构造下列目标函数,应用Levenberg-Marquardt优化搜索算法进行求解。
2 组合式三维激光扫描系统
组合式三维激光扫描系统由旋转激光经纬定位网络、激光扫描测头和定位光电传感器组成,如图4所示。将三个光电定位传感器安装在激光扫描测头上,具有固定的空间位置关系。因此,可以应用三个光电传感器实时测量激光扫描测头的测量位姿,将激光扫描测头采集的数据转换到世界坐标系下,最终得到物体表面三维扫描数据。
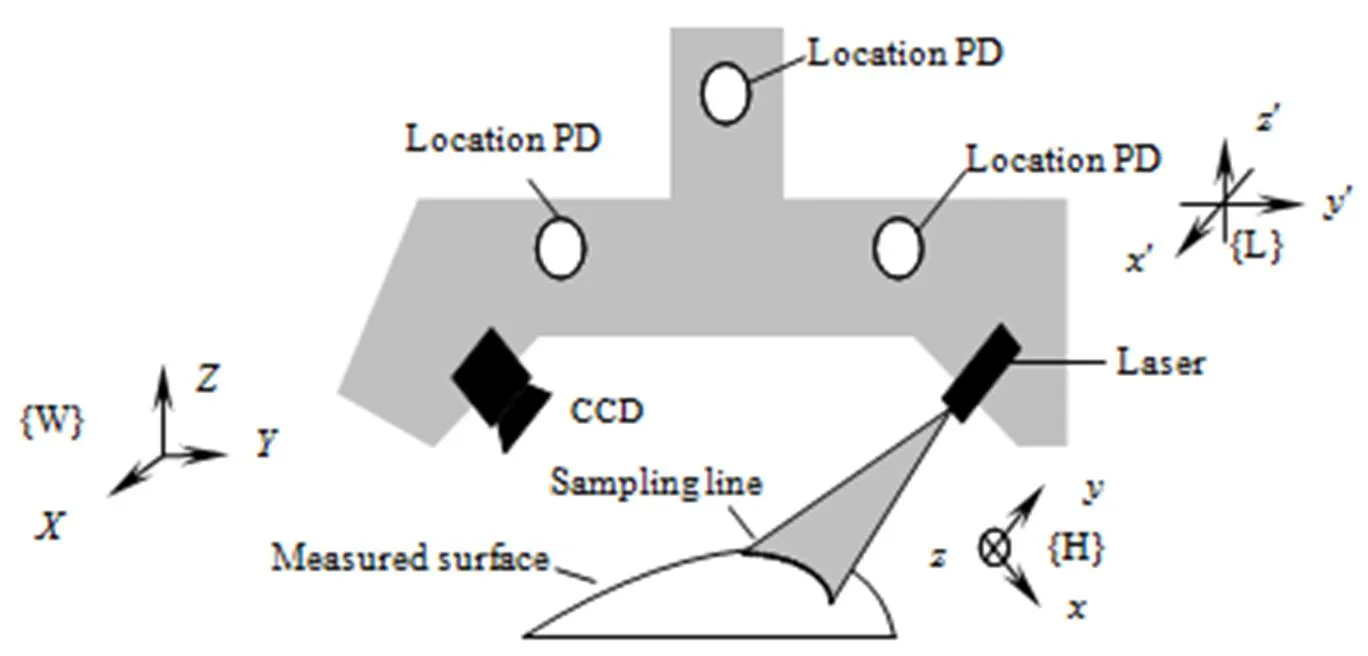
图5 组合式三维扫描系统坐标系
定义旋转经纬仪网络的定位网络坐标系为世界坐标系{W},三维光电传感器坐标构建坐标系{L},激光扫描测头坐标系为{H}。坐标系{L}实时反映激光扫描测头的位姿,组合式激光三维扫描系统测量模型为
首先建立光电传感器定位坐标系{L}。定义1点为{L}坐标系的原点,向量12为¢轴正方向。然后,由向量12与向量13叉乘得¢轴正方向,再由¢轴与¢轴叉乘得到¢轴正方向。由1与2、1与3构建两个单位方向向量分别记作12和13,即:
定义坐标系{L}的、和轴在{W}坐标系中对应的单位方向向量分别为、、,可按下式计
算得到
在测量之前,只需事先标定{L}和{H}的之间固定的坐标转换矩阵,而激光测头在世界坐标系{W}下的实时测量姿态可以表示为坐标系{L}到{W}的齐次坐标转换矩阵,其中旋转矩阵为
因为1为{L}坐标系的原点,所以坐标系{L}和{W}的之间的平移向量为
则对应的齐次坐标转换关系为
3 实验结果与分析
基于旋转经纬仪定位网络的组合式激光扫描系统进行了几个测量实验,包括标准球的扫描测量、叶片的扫描测量、飞机机身模型的扫描测量。测量过程中,以四台发射机为一个测量单元,发射机组大致以被测物为中心,按扇形布局,扫描测头以及被测物体与发射机的距离在5 m范围内,以三坐标测量机对被测工件的测量结果为标准值,将本系统的测量结果与之进行比对,测量分析结果如下。
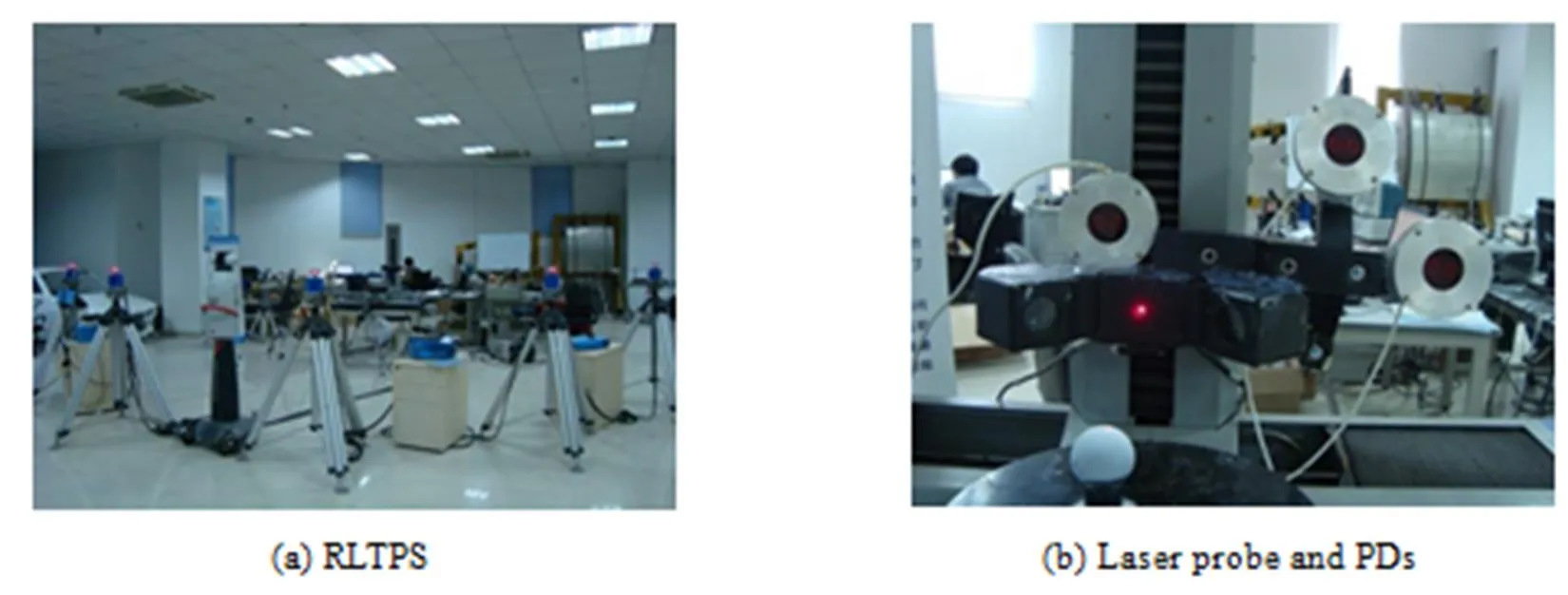
图4 基于旋转激光经纬仪的三维激光扫描模型
3.1 标准球测量
为了检测组合测量系统的测量精度,我们对一个标准球进行扫描测量。具体操作过程如下:
采用一个半径为22.228 mm的陶瓷标准球,置于测头扫描范围内,如图6(a)所示。在球面上以3 mm为步长等间隔采样10次,得到球面上的10条采样曲线,同时测量3点光电传感器的坐标,确定激光扫描测头位姿,得到球面的点云数据,如图6(b)所示。将测量数据进行点云拟合,解出球面半径为22.345 mm,如图6(c),跟标准球基准半径22.228 mm比较,偏差为0.117 mm,单点测量标准差0.015 mm。

图6 标准球的测量与数据处理
3.2 发动机叶片曲面激光扫描
对汽轮机叶片进行了测量,如图7(a)所示,以5 mm为步长等间隔采样60次,测量3点光电传感器坐标,得到汽轮机叶片三维点云数据,如图7(b)所示,拟合得到的叶片表面CAD模型,如图7(c)所示。通过点云数据拟合的汽轮机叶片模型与标准值比对的偏差为0.235 mm,单点测量标准差为0.018 mm。
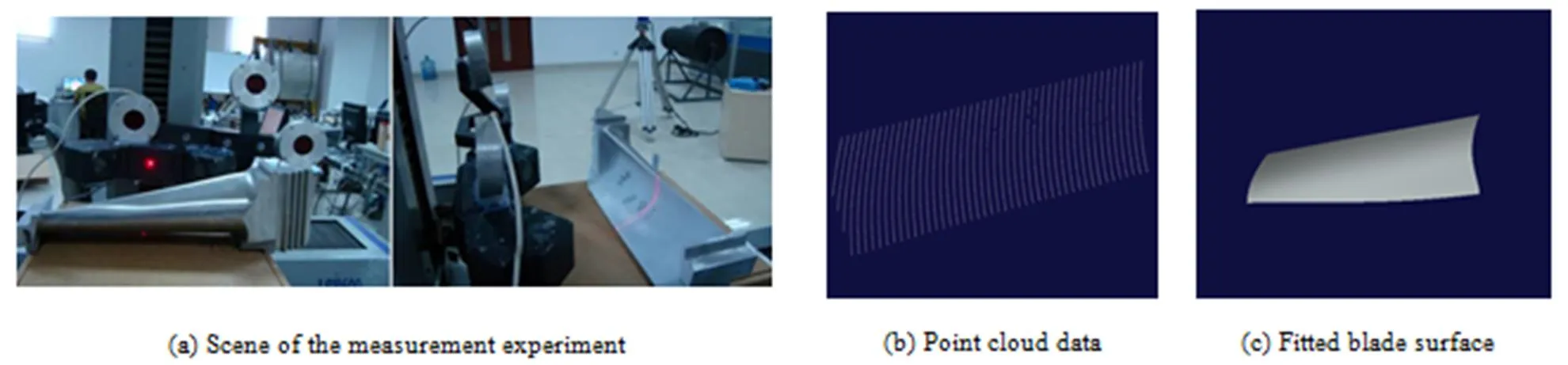
图7 汽轮机叶片组合式三维扫描测量
3.3 飞机模型曲面三维激光测量
测量飞机模型机身曲面,如图8(a)所示,以5 mm为步长等间隔采样40次,测量每个扫描位置的3点光电传感器的坐标,得到飞机模型机身的点云数据如图8(b)所示,曲面拟合曲面如图8(c)所示。通过点云数据拟合的飞机模型机身与标准值比对的偏差为0.248 mm,单点测量标准差为0.020 mm。
根据上述实验基于旋转经纬仪定位网络的组合式激光扫描系统的各项测量,得出一个单元发射机组在5 m´5 m范围内的测量精度是0.25 mm,重复定位精度小于0.02 mm。
4 结 论
研制了一种基于旋转激光经纬仪空间定位网络的组合式激光三维扫描系统,定位网络为测量系统提供了统一的全局世界坐标系,固定在激光扫描测头的光电传感器实时测量激光扫描测头的姿态,将激光扫描数据转换到定位网络世界坐标系下,实现了一种适用于现场测量无导轨三维扫描系统。实验结果表明,研制的组合式三维激光扫描系统有较高的测量精度,在大型物无导轨三维扫描测量等领域有应用前景。
[1] 叶声华,邾继贵,张滋黎,等. 大空间坐标尺寸测量研究的现状与发展 [J]. 计量学报,2008,29(09):1-6.
YE Shenghua,ZHU Jigui,ZHANG Zili,. Status and Development of Large—scale Coordinate Measurement Research [J]. Acta Metrologica Sinica,2008,29(09):1-6.
[2] Maisano Domenico A,Jamshidi J,Franceschini F,. Indoor GPS:System Functionality and Initial Performance Evaluation [J]. International Journal of Manufacturing Research(S1750-0591),2008,3(3):335-349.
[3] 王希花,郭洪杰,黄威. wMPS测量原理算法及优化 [J]. 测控技术,2012,31(9):36-40.
WANG Xihua,GUO Hongjie,HUANG Wei. wMPS Measurement Algorithm and Optimization [J]. Measurement & Control Technology,2012,31(9):36-40.
[4] 耿磊,邾继贵,熊芝,等. wMPS测角不确定度研究 [J]. 光电工程,2011,38(10):6-12.
GENG Lei,ZHU Jigui,XIONG Zhi,Research on Angle Measurement Uncertainty of wMPS Opto-Electronic Engineering [J]. Opto-Electronic Engineering,2011,38(10):6-12.
[5] 张欢. 旋转激光经纬仪定位系统现场标定方法研究及其应用 [D]. 西安:西安交通大学,2012:30-45.
ZHANG Huan. Research on Filed Calibration Method of Local Space Positioning System and Application [D]. Xi’an:Xi’an Jiaotong University,2012:30-45.
[6] 黄桂平,叶声华,李广云,等. 经纬仪非接触大尺寸三坐标测量系统的开发及其在航天器检测中的应用 [J]. 上海计量测试,2002,29(3):9-12.
HUANG Guiping,YE Shenghua,LI Guangyun,. Development on Non-Contacting 3D Measurement System of Theodolites and It’s Application in Aerospace [J]. Shanghai Measurement and Testing,2002,29(3):9-12.
[7] Pratt T,Casteel S,Hedges T,. Rotating head optical transmitter for position measurement system:US,US6621565B2 [P]. 2003-09-16.
[8] 吴晓峰,张国雄. 室内GPS测量系统及其在飞机装配中的应用 [J]. 航空精密制造技术,2006,42(5):1-5.
WU Xiaofeng,ZHANG Guoxiong. In-door GPS Measuring System and Its Application in Aircraft Assembly [J]. Aviation Precision Manufacturing Technology,2006,42(5):1-5.
[9] LIU Zhigang,LIU Zhongzheng,WU Jianwei. Mobile large scale 3D coordinate measuring system based on network of rotating laser automatic theodolites [C]// Sixth International Symposium on Precision Engineering Measurements and Instrumentation,Hangzhou,China,August 08,2010,7544:75446P-01-75446P-8.
Modular Laser 3-dimensional Scanning System Based on the otary-laser Theodolite Positioning Network
FANG Honggen1,GUO Lijie1,YANG Xiaohui1,ZHANG Huan2,LIU Zhigang2,NIE Bin1,DONG Fengbo1,YANG Tianhao1
( 1. Eighth Institute 149 Factory, China Aerospace Science and Technology Corporation, Shanghai 200245, China; 2. State Key Laboratory for Manufacturing Systems Engineering, Xi’an Jiaotong University, Xi’an 710054, China )
A modular laser 3-dimensional scanning system based on the rotary-laser theodolite positioning network is designed. As a positioning measurement system combining the measuring principle of frontage intersection of theodolite and the concept of GPS, the Rotary-laser Theodolite Positioning System (RLTPS) can realize the parallel measurement of spatial coordinate of multiple Photodiode Detector (PD). The spatial position of the laser probe is determined by the coordinates of the three PD, therefore, the portable laser 3-dimensional scanning system is realized, which can be used to the measurement in the industrial fields. The feature point cloud data of objects surface are measured by the designed Modular Laser 3-dimensional Scanning System and the experimental results show that the measurement system can satisfy the application requirements.
rotary-laser theodolite positioning network; modular laser 3-dimensional scanning; field calibration; positioning measurement
1003-501X(2016)06-0057-06
V556.5
A
10.3969/j.issn.1003-501X.2016.06.010
2015-05-09;
2015-07-23
航天科技集团重大工艺项目(ZDGY2014-39)
方红根(1977-),男(汉族),江西永丰人。高级工程师,主要研究工作是自动化装配与机器人技术。E-mail: fangdanwei@163.com。