船载星敏感器安装矩阵动态标定方法
2016-09-29焦宏伟郭敬明苏绪伟张同双
焦宏伟,郭敬明,2,苏绪伟,潘 良,张同双
船载星敏感器安装矩阵动态标定方法
焦宏伟1,郭敬明1,2,苏绪伟1,潘 良1,张同双1
( 1. 中国卫星海上测控部,江苏 江阴 214431;2. 中国科学院长春光学精密机械与物理研究所,长春 130033 )
为简化船载星敏感器安装矩阵标定步骤,提高星敏感器安装矩阵标定精度,提出了一种根据星敏感器测量信息和惯导系统输出信息对星敏感器安装矩阵进行动态标定的方法,将星敏感器安装矩阵的标定过程分解为粗标定和精标定两步。粗标定过程不考虑蒙气差影响,精标定过程根据粗安装矩阵和蒙气差修正模型对星敏感器测量信息进行修正,消除蒙气差影响,实现船载星敏感器安装矩阵的精确动态标定。实验结果表明,该方法经过两次迭代即可得到精确标定结果,不同时段实验结果表明该方法的一致性较好,星敏感器利用安装矩阵标定结果解算的船体姿态数据与惯导数据对比结果表明该方法是正确的。
船载星敏感器;安装矩阵;动态标定;蒙气差
0 引 言
星敏感器是一种以恒星为参照物进行姿态测量的敏感器件,其姿态信息来自于恒星星光的方向矢量在惯性参考坐标系的指向和恒星星光方向矢量在星敏感器测量坐标系的指向,姿态测量精度可达角秒级[1-2]。但在实际应用中,星敏感器安装误差可达到角分级[3],带来的测量误差大大高于星敏感器的随机测量误差,严重污染了星敏感器的量测信息,因此安装矩阵标定精度是影响星敏感器在实际应用中测量精度的主要因素之一。
现有船载星敏感器安装矩阵标定方法是静态标定法,其原理是船舶在坞内坐墩条件下,以当地水平面为船体姿态水平基准,以经纬仪航向测量值为船体航向基准,利用星敏感器测星得到星敏感器姿态,根据测量时间和星敏感器船位(由船载GPS设备获得)等信息经过坐标系转换后在同一坐标系下进行解算,进而得到星敏感器安装矩阵。静态标定法要求在船舶坞内坐墩条件下进行,同时必须选择天气晴朗、可观测恒星较多的夜晚,这使得安装矩阵的标定工作耗时耗力。
针对上述问题,本文提出了一种以星敏感器测量信息和惯导系统输出信息为依据的星敏感器安装矩阵动态标定方法。该方法无需船舶静态条件,将星敏感器安装矩阵的标定过程分解为粗标定和精标定两步,粗标定过程不考虑蒙气差影响,综合星敏感器和惯导实时输出姿态数据计算出粗安装矩阵,精标定过程根据粗安装矩阵和蒙气差修正方法对星敏感器测量信息进行修正,消除蒙气差影响,实现船载星敏感器安装矩阵的精确动态标定。
1 星敏感器观测模型
船用星敏感器由光学系统和图像传感器拍摄天球上的恒星星图,通过图像处理和星图识别获取恒星的观测矢量和参考矢量,进而确定星敏感器坐标系相对参考坐标系的转换矩阵。图像传感器常用的成像模型为中心透视投影模型[4],图1表示了中心透视投影模型三个不同层次的坐标系统:世界坐标系、摄像机坐标系、图像坐标系。图中为相机光心,平面为反片位置,平面为正片位置。为了表达直观,一般都取正片做研究。

图1 中心透视投影成像关系
2 粗标定过程
地心惯性系原点在地球质心,参考平面是J2000.0平赤道面,轴指向J2000.0春分点,轴向北指向平赤道面北极点,按右手定则构成直角坐标系。当地地理坐标系原点在船载惯导三轴中心,轴在当地水平面内指向北,轴过原点沿当地铅垂线向上,轴由右手定则确定。根据星敏感器船位信息及测量时刻信息可得到地心惯性系与当地地理坐标系(系)之间的转换矩阵,计算过程中包括岁差、章动、极移修正和船位修正[7]等,如图2所示。

图2 坐标转换
星敏感器安装矩阵是星敏感器像空间坐标系与载体坐标系之间的旋转矩阵,表示船载星敏感器坐标系与甲板坐标系不重合关系。星敏感器坐标系与载体坐标系(甲板坐标系)的坐标系原点重合,如图3所示。载体坐标系(即系),坐标原点位于船载惯导三轴中心,轴沿艏艉线指向船艏,轴垂直于甲板向上,轴与轴、轴成右手定则,指向右舷。
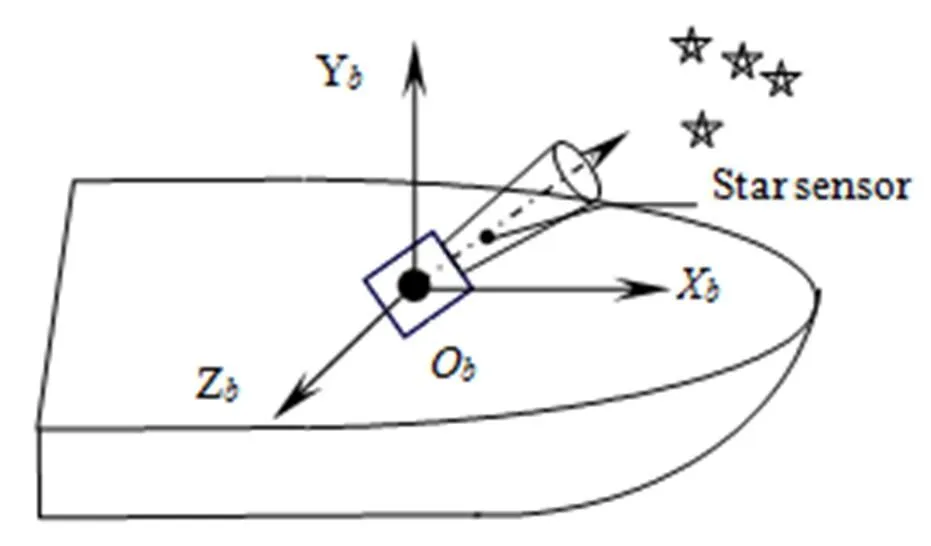
图3 船载星敏感器坐标系
根据惯导系统实时输出的船体姿态数据可以计算出载体坐标系(系)与当地地理坐标系之间的转换矩阵,按照132旋转顺序可表示为
3 精标定过程
由于大气折射,星敏感器观测到的恒星方向与真方向不同,这个方向差叫做蒙气差[8]。粗标定过程未考虑蒙气差修正,计算出星敏感器的粗安装矩阵存在误差,误差角在角分量级。星敏感器在大气内以任意姿态观星,光轴会和天顶方向形成一定的夹角,如图4所示。

图4 蒙气差几何修正原理图
蒙气差修正过程如下。
3.1 姿态转移矩阵计算
1) 星敏感器固联安装在载体上,根据其安装矩阵可以得到载体坐标系(系)到星敏感器坐标系的姿态转移矩阵。
2) 载体配置了捷联惯导,可以通过三轴陀螺解算得到载体坐标系到当地地理坐标系(系)下的姿态转移矩阵。
由此,观测时刻由地心惯性坐标系到星敏感器坐标系的姿态转移矩阵为
观测时刻由当地地理坐标系到星敏感器坐标系的姿态转移矩阵为
3.2 视天顶矩的确定
观测量蒙气差修正方法[9]是通过对观测量进行蒙气差修正,得到修正后的观测矢量,进而得到精确的解算结果。本文利用一种参考量蒙气差修正方法,其思路是:观测矢量不变,对参考矢量进行蒙气差修正,得到修正后的参考矢量,再根据式(12)计算的精确结果。
3.3 蒙气差计算方法
3.4 蒙气差修正方法
根据式(14)得到的恒星的真天顶距和式(19)即可计算恒星的实际蒙气差(实际上式(19)的因素是视天顶距,但在这里使用真天顶距代替视天顶距,二者计算得到的蒙气差有微小差异,在0.1″以内)。由于蒙气差只对俯仰角产生影响,所以只需对俯仰角进行修正得到修正后的俯仰角,其计算公式为
3.5 精解安装矩阵
精标定过程是在粗标定过程中加入蒙气差修正步骤,利用粗安装矩阵和地心惯性系与当地地理坐标系之间的转换矩阵及载体坐标系与当地地理坐标系之间的转换矩阵对每个恒星参考矢量进行蒙气差修正,根据式(21)得到修正后的观测矢量,再根据式(8)可以计算出精安装矩阵。为提高安装矩阵解算精度,可以重复上述过程,直到安装矩阵解算结果收敛。为降低惯导随机误差及陀螺漂移对安装矩阵标定结果的影响,一般取1 h之内的星敏感器测量数据和惯导数据进行安装矩阵解算,并对解算出的安装矩阵进行多点平均。
4 实验结果
根据本文提出的安装矩阵动态标定方法对某船载星敏感器安装矩阵进行标定,选取数据段为某晚21点至22点约9 000点有效数据,其粗标定结果和精标定结果如表1所示,为便于比较,将安装矩阵按132顺序解算为安装姿态角。
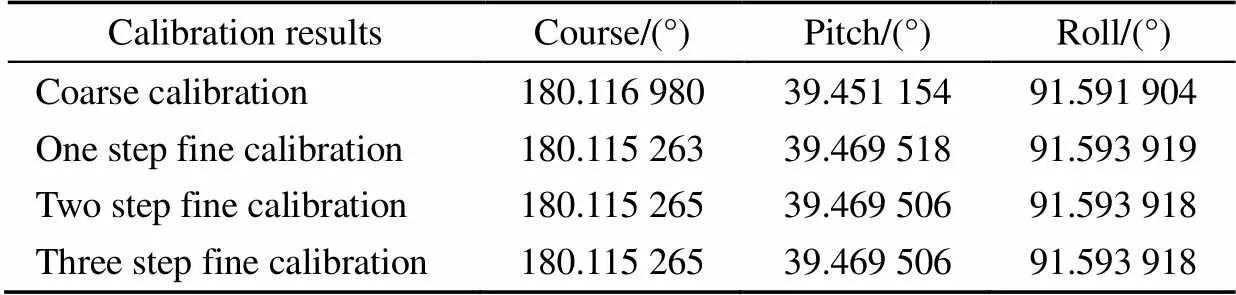
表1 安装矩阵标定结果
从表1的结果可以看出,对于同一组数据,其1步精标定结果和粗标定结果在俯仰方向上存在角分量级的差异,这主要是由蒙气差带来的影响,2步精标定以后的结果则趋于稳定。
利用本文方法对不同时间段星敏感器数据进行处理,解算得到的安装矩阵标定结果如表2所示。

表2 不同时间段安装矩阵标定结果
从表2结果可以看出,对于不同时段数据解算得到的标定结果,其在俯仰方向的角度差异在角秒量级,在航向和滚动方向的角度差异在20″左右,这也说明本文方法标定结果的一致性较好。俯仰角变化较小的原因是星敏感器本身的指向测量精度较高(在5″以内),滚动角变化较大的原因是星敏感器本身的滚动角测量精度较低(在50″左右),航向角变化较大的原因一方面是由于惯导数据的航向角测量精度较水平姿态测量精度低(在10″左右),另一方面是由于星敏感器安装时轴并没有完全平行于船体水平方向,使得横滚方向测量误差耦合到航向方向。
利用表1的标定结果对某次船舶锚泊状态下的星敏感器测量数据进行处理,得到的船体姿态数据与惯导输出的船体姿态数据进行比较,航向角、纵摇角和横摇角的残差均值分别为-13.73²、4.81²和3.308²,航向角、纵摇角和横摇角的残差均方根分别为24.87²、2.56²和30.41²,纵摇角和横摇角对比图如图5所示,对比结果显示星敏感器的指向精度(即测角精度)与出厂鉴定指标相当,也说明本文提出的安装矩阵标定方法是正确的。
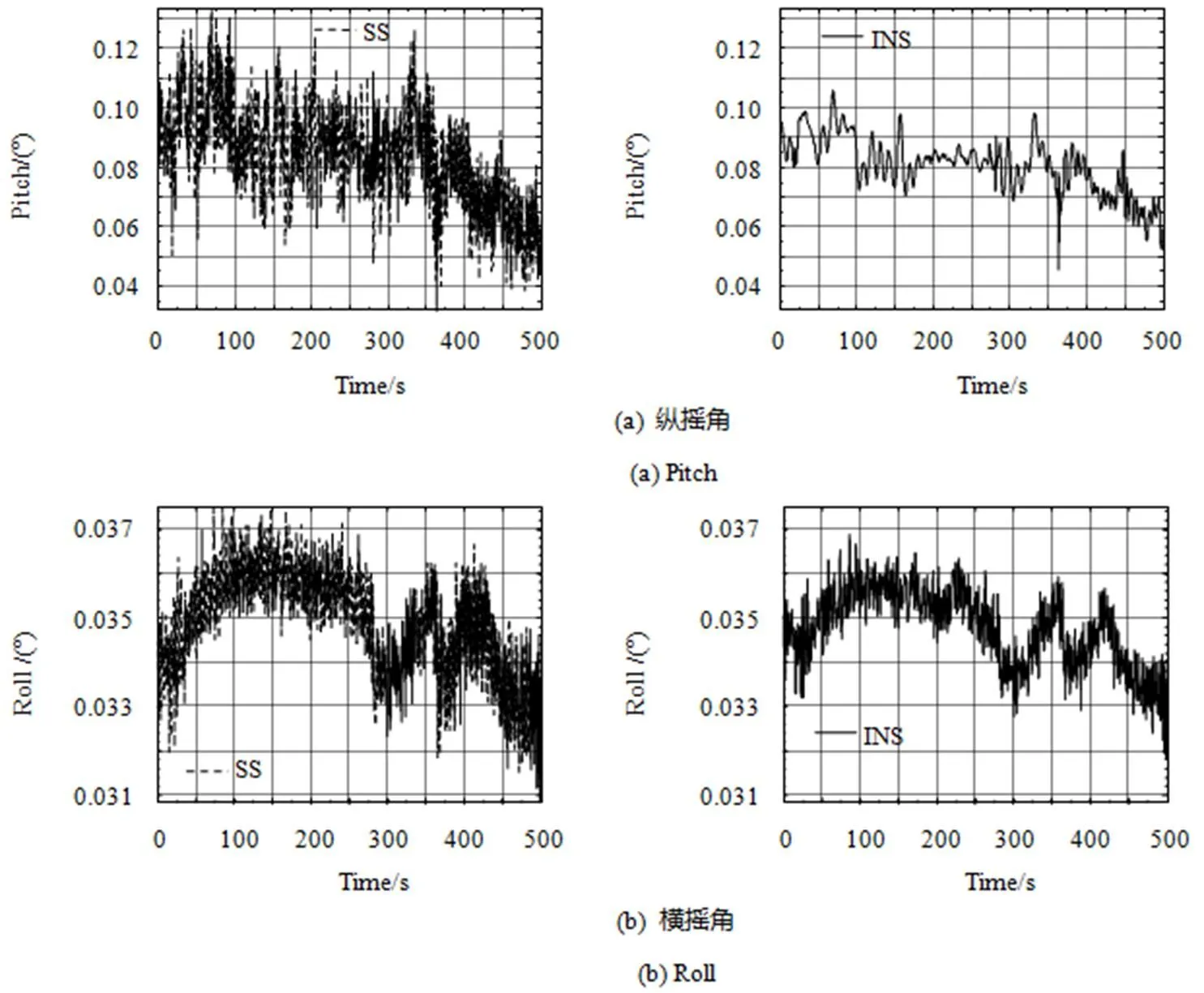
图5 星敏感器与惯导姿态角对比图
5 结 论
本文提出了一种根据星敏感器测量信息和惯导系统输出信息对星敏感器安装矩阵进行动态标定的方法。将星敏感器安装矩阵的标定过程分解为粗标定和精标定两步,粗标定过程不考虑蒙气差影响,精标定过程根据粗安装矩阵和蒙气差修正方法对星敏感器测量信息进行修正,消除蒙气差影响,实现船载星敏感器安装矩阵的精确动态标定。该方法不需要船舶坞内静态等苛刻条件,可在任意航行或锚泊过程中对星敏感器安装矩阵进行精确标定。实验结果表明,对同一段数据该方法经过两次迭代即可得到精确标定结果,不同时段实验数据对比结果表明,该方法计算得到的安装矩阵的一致性较好,星敏感器利用安装矩阵标定结果解算的船体姿态数据与惯导数据对比表明该方法是正确的。
[1] Ju G,Junkins J L. Overview of star tracker technology and its trends in research and development [J]. Advances in the Astronautical Sciences(S0065-3438),2003,115(2):461-477.
[2] 张宁,何家维,宋莹,等. 利用系统辨识的星敏感器模型修正与测角精度检测 [J]. 光电工程,2013,40(1):38-43.
ZHANG Ning,HE Jiawei,SONG Ying,. The Model Updating and Angel Measurement Accuracy Testing of Star Sensor Using System Identification [J]. Opto-Electronic Engineering,2013,40(1):38-43.
[3] 孙高飞,张国玉,郑茹,等. 星敏感器标定方法的研究现状与发展趋势 [J]. 长春理工大学学报:自然科学版,2010,33(4):8-14.
SUN Gaofei,ZHANG Guoyu,ZHENG Ru,. Star Sensor Calibration Research and Development [J]. Journal of Changchun University of Science and Technology:Natural Science Edition,2010,33(4):8-14.
[4] 马颂德,张正友. 计算机视觉—计算理论与算法基础 [M]. 北京:科学出版社,1998:35-40.
MA Songde,ZHANG Zhengyou. Computer Vision:Compute Theory and Algorithms Foundation [M]. Beijing:Science Press,1998:35-40.
[5] Shuster M D,Oh S D. Three-Axis Attitude Determination from Vector Observation [J]. AIAA Journal of Guidance and Control(S0001-1452),1981,4(1):70-77.
[6] Shuster M D. The Quest for Better Attitudes [J]. The Journal of the Astronautically Sciences(S0021-9142),2006,54(3):657-683.
[7] 郭敬明. 基于星敏感器的船姿测量方法研究 [D]. 北京:中国科学院大学,2013:17-24.
GUO Jingming. Study on ship attitude measurement based on star sensor [D]. Beijing:University of Chinese Academy of Sciences,2013:17-24.
[8] 茅永兴,张同双,朱伟康,等. 船载星敏感器测星数据蒙气差实时修正方法 [J]. 飞行器测控学报,2012,31(3):50-53.
MAO Yongxing,ZHANG Tongshuang,ZHU Weikang,A Real-Time Atmospheric Refraction Correction Method for Measurement Data of Ship-Borne Star Sensors [J]. Journal of Spacecraft TT & C Technology,2012,31(3):50-53.
[9] 王海涌,林浩宇,周文睿. 星光观测蒙气差补偿技术 [J]. 光学学报,2011,31(11):1101002.
WANG Haiyong,LIN Haoyu,ZHOU Wenrui. Technology of Atmospheric Refraction Compensation in Starlight Observation [J]. Acta Optica Sinica,2011,31(11):1101002.
A Dynamic Installation Matrix Calibration Method of Ship-borne Star Sensor
JIAO Hongwei1,GUO Jingming1,2,SU Xuwei1,PAN Liang1,ZHANG Tongshuang1
( 1. China Satellite Maritime Tracking and Control Department, Jiangyin 214431, Jiangsu Province, China; 2. Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Science, Changchun 130033, China )
In order to simplify the process and improve the accuracy of ship-borne star sensor install matrix calibration, a dynamic method which uses star sensor information and INS information to calculate install matrix is proposed. The proposed method divides the calibration process into coarse calibration step and fine calibration step. Coarse calibration step calculates the coarse install matrix without consider the influence of atmospheric refraction. By using coarse install matrix and the atmospheric refraction compensation algorithm model, the atmospheric refraction is compensated and the accurate install matrix is calibrated in fine calibration step. Experiment results show that the proposed method can get the accurate calibration result by only two iterations and the install matrixes calibrated in different times are consistent. The contrastive results of star sensor attitude and INS attitude show the correctness of the proposed method.
ship-borne star sensor; install matrix; dynamic calibration; atmospheric refraction
1003-501X(2016)06-0007-06
V241.62
A
10.3969/j.issn.1003-501X.2016.06.002
2015-06-18;
2015-10-28
航天科学基金(2011-JS-000675); 国家自然科学基金资助项目(60878052)
焦宏伟(1982-),男(汉族),吉林四平人。工程师,博士,主要研究航天测控及船姿船位测量技术。E-mail: jhw23@aliyun.com。
郭敬明(1985-),男(汉族),湖北荆州人。助理研究员,博士,主要研究星敏感器及船姿船位测量技术。E-mail: gjm441@163.com。