寻迹机器人
2016-09-27
“老师,今天我们要学习什么呢?” “嗯,在机器人比赛场地上经常会看到机器人沿着黑线行走,它们是怎么办到的呢?原来,它们身上装有能够巡线的传感器——红外反射传感器。”现在我们就来给机器人加一个这样的功能——寻迹!
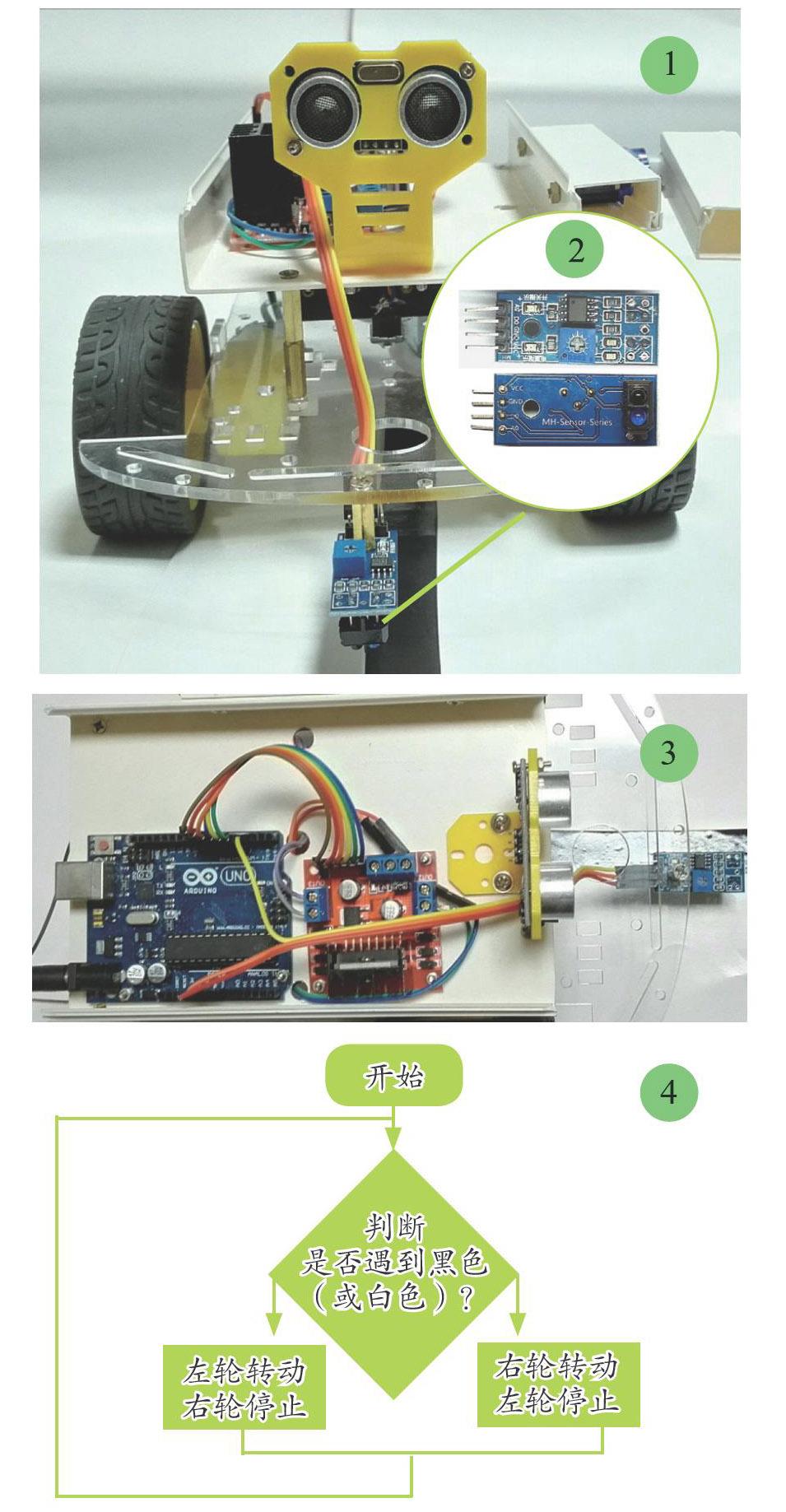
图1所示是2016年第6期做的点赞机器人,我们在点赞机器人的前面加了一个巡线模块。如图2所示,巡线模块实际上是一个红外反射传感器。模块上有一个红外发射二极管和一个光敏三极管,其背面有两个指示灯,分别是电源指示灯和开关指示灯。当通电时,电源指示灯亮,红外发射二极管不断发射红外线。当遇到黑色或较暗的物体时,红外线没有被反射回来,或虽然被反射回来但强度不够大,光敏三极管就处于关断状态,此时模块输出端D0为低电平,开关指示灯处于熄灭状态。当遇到白色或较亮的物体时,红外线被反射回来且强度足够大,光敏三极管饱和,此时模块输出端D0为高电平,开关指示灯被点亮。
如图3所示,为方便观察,只连接电机驱动板和寻线模块。先把红外传感器固定到小车的前端,传感器距离地面1cm左右。红外反射传感器的VCC、GND、D0分别和Arduino板的5V、GND和D3脚连接。通电后观察巡线模块在黑、白区域移动时,开关指示灯是否会变化。如果是常亮或常暗,可调节模块上的可调电阻,直到指示灯的状态可以变化。
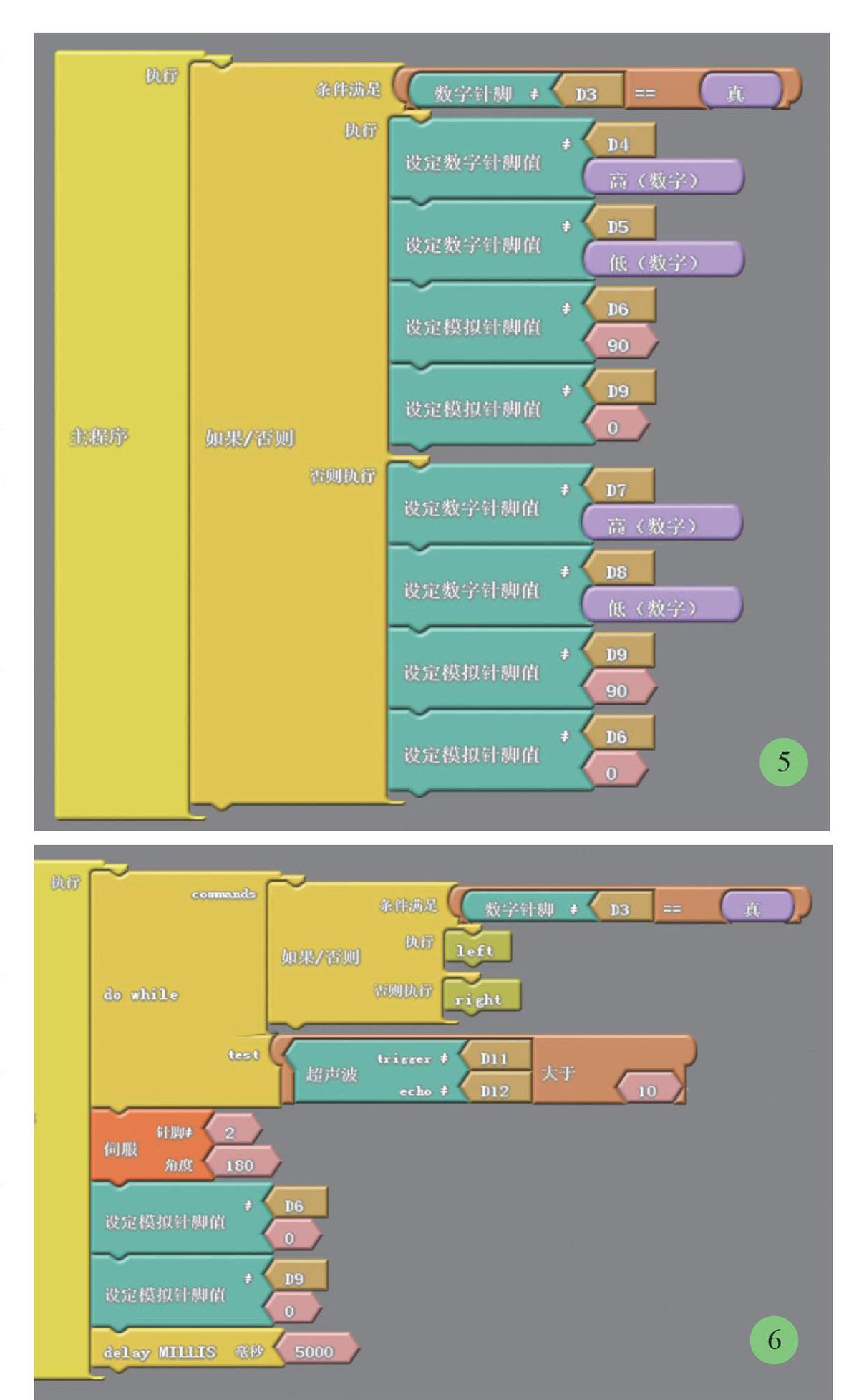
机器人沿黑线行走的原理如图4所示,编写巡线程序如图5,图中D6、D9是PWM调速引脚,用于控制左右电机的转速,设置为90。当一个电机转动时,另一个电机的调速引脚设置为0,控制电机停止转动。
把程序下载到小车上。找一张大的白纸,用黑色电工胶带贴出一个黑色圆形轨迹图,测试小车是否能沿黑线行走。图5为所编写的程序,因为没有停止指令,所以小车会一直沿着黑线行走。现在把超声波传感器和舵机连接到电路中,修改程序如图6、图7、图8。在这些程序中,小车的左转和右转分别放置到两个子程序left、right中,这样可以使程序简短一些。小车的巡线程序和图5就不一样了,它是一种条件循环。当超声波传感器与前面的障碍物距离大于10cm的时候,小车重复执行巡线程序。当障碍物距离小于10cm时,机器人的手臂竖立起来,小车停止运动5s。
