基于K60的载人平衡车
2016-09-27北方民族大学魏彩颖孟庆宇
北方民族大学 魏彩颖 祝 玲 孟庆宇 李 鑫
基于K60的载人平衡车
北方民族大学魏彩颖祝玲孟庆宇李鑫
随着低碳社会的到来,节能减排已然成为当今社会的主流。作为环境污染的主要制造者,汽车尾气越来越成为人们关注的 题。基于这种状况,我们设计制作了一种新型节能的交通工具:两轮自平衡车。平衡车以电能为主要动力,用现在主流芯片FREESCALE K60最为控制核心,采用高精度六轴陀螺仪来控制平衡。本设计不仅最大程度缓解了环境污染问题,而且缓解了城市拥堵,一举两得。
低碳社会;节能减排;FREESCALE K60;陀螺仪;城市拥堵
1.绪论
现如今环境问题愈演愈烈,交通状况越来越差,已经严重影响到人们的日常工作和生活。鉴于此,本文设计了一种完全电能驱动的小型载人两轮平衡车。本设计以“飞思卡尔”智能车竞赛直立组为灵感,采用freescale系列K60芯片为主控制器,以当今市场主流高精度六轴陀螺仪MPU6050作为角度采集模块。软件方面则采用了卡尔曼滤波算法融合陀螺仪的加速度和角速度,得到一个稳定的实时相对角度数据,然后利用经典PID和模糊算法对数据进行处理之后PWM控制电机驱动输出,平衡车持续保持稳定。
2.总体设计
文章所设计的两轮平衡车采用16bit数字陀螺仪实时检测车体的俯仰以及倾侧状态和状态的变化率,经过高速的cotex M4内核的K60芯片将数据通过一定算法进行融合得到一个稳定的状态信息,从而控制电机前进或者后退保持车身平衡并且提供报警信息,同时通过编码器随时检测电机速度,构成一个反馈系统,是平衡车稳定。
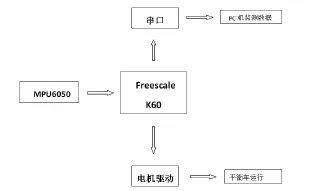
图1
3.系统硬件设计
平衡车系统硬件设计主要包括主控制器、角度采集模块、电机驱动模块、电源模块。以下将依次介绍。
3.1freescale K60主控模块
飞思卡尔半导体是世界领先的半导体公司,其专注于嵌入式处理解决方案。飞思卡尔面向汽车、网络、工业和消费电子市场,提供的技术包括微处理器、微控制器、传感器、模拟集成电路和连接。而其旗下的K60微处理器则是一个常用的版本。此版本是基于cotex m4内核的Kinetis系列芯片,主要应用于汽车智能方面,现在作为飞思卡尔智能车竞赛主要控制器。
3.2MPU6050六轴陀螺仪
在平衡车制作及运行过程中,另外一个重心就是姿态获取及处理。在本次设计中,我们选取现在市场上热门的六轴数字陀螺仪MPU6050模块,此模块集成了三轴陀螺仪和三轴加速度计,通信方式为标准IIC通信协议,并且芯片内置16bit AD转换器和16bit数据输出,在精度上完全能够达到要求,并且降低了算法复杂度。
3.336V电机驱动模块
在平衡车的电机驱动部分,采用l298电机驱动芯片,这块芯片内部包含四通道逻辑驱动电路。主要应用于二相和四相电机,可驱动46A、2A以下的电机。在本次设计中,为了保证驱动能力,采用两块驱动模块单独驱动。驱动芯片内部电路图如图2所示:

图2
4.系统软件设计
4.1系统软件流程图
本文所设计的平衡车系统在软件方面主要分为:系统初始化,系统中断持续采集信号,卡尔曼滤波,PID控制系统,PWM输出。流程图如图3所示:

图3
4.2系统初始化
系统初始化是对主控芯片的引脚输出以及中断控制器和IIC通信接口进行配置,还有一些外围模块的初始化设置。主要作用是保证系统运行所需要的部分能够正常运行,并且能达到预期的标准。
4.3卡尔曼滤波
卡尔曼滤波(Kalman filtering)一种利用线性系统状态方程,通过系统输入输出观测数据,对系统状态进行最优估计的算法。由于观测数据中包括系统中的噪声和干扰的影响,所以最优估计也可看作是滤波过程。在本文所涉及的滤波算法主要作用是对陀螺仪所采集的加速度和角速度值进行数据融合,得到一个最优角度数据,从而进行姿态矫正,保证平衡车平稳运行。
4.4PID
PID控制算法是一种应用最经典的自动化控制算法,其名称是由比例、积分、微分英文单词的缩写。其中P值是对宏观的调整,在大偏差下对数据作调整,I值和D值则是对微观的调整,保证了数据误差的提前改善。而在平衡车设计中,只采用PI控制,整体控制在四旋翼以及多旋翼中比较常见。
[1]韩学军,王义军.模拟电子技术基础[M].中国电力出版社,2013,03.
[2]阎石.数字电子技术基础[m].高等教育出版社,2006,05.
[3]袁帅.两轮自平衡机器人系统的设计.北京交通大学硕士论文,2012.
with the advent of the low-carbon society, energy-saving emission reduction has become the mainstream of today’s soci a topic of concern. Based on this situation, we have designed a new type of energy saving vehicle: two wheeled self balancing vehicle. Balance car with electric energy as the main power, with the current mainstety. As the main producer of environmental pollution, automobile exhaust has becomeream chip FREESCALE K60 the most control core, using high-precision six axis gyroscope to control the balance. This design not only alleviates the problem of environmental pollution,And to ease the congestion of the city, shoot two hawks with one arrow.
low carbon society energy saving emission reduction K60 FREESCALE urban congestion