电子防碰天车设计与改进
2016-09-20马燚松
马燚松
(中石化西南石油工程有限公司重庆钻井分公司,重庆400042)
电子防碰天车设计与改进
马燚松*
(中石化西南石油工程有限公司重庆钻井分公司,重庆400042)
为了提高钻机的安全保护性能,防止发生游吊系统与天车发生碰撞事故,设计了智能电子防碰天车装置。该装置由触摸屏、西门子S7-300CPU、编码器、电磁阀及相关电控箱组成。在钻机绞车低速或者高速端导气龙头连接口处安装高速编码器,检测绞车的旋转速度和游车高度,通过对PLC和触摸屏进行编程、画面组态及合理线路设计,控制电磁阀的通断,以实现游车的上碰下轧紧急刹车保护和提前预警功能。试验运行结果表明该装置稳定性好、抗干扰能力强、操作简单、安装方便、功能可靠,能够起到很好的上碰下砸保护刹车和提前预警功能。
电子防碰天车;编码器;电磁阀;触摸屏;PLC
为了保证人生和设备安全,防止发生游吊系统与天车发生碰撞,钻机一般配置有3套防碰天车系统,即滚筒过卷防碰装置、天车重锤防碰装置和电子防碰装置。滚筒过卷防碰装置、天车重锤防碰装置均为机械防碰装置,只能起到上碰保护,没有高度预警和下砸保护功能,各厂家的电子防碰装置配置和功能有所区别。
目前,多数厂家的电子防碰天车装置利用MC51单片机为中央处理单元,通过绞车滚筒当前缠绳层数、直径、当前最外层缠绳圈数设定初始0位,利用编码器计量滚筒的旋转圈数计算设置防碰高度,利用数码显示管显示游车高度。在使用过程中故障率高,稳定性、抗干扰能力差,同时设置的防碰高度、零点经常跳变不能起到很好的保护作用。为了改进电子防碰天车性能,提高其稳定性和抗干扰能力,降低故障率,更好起到天车防碰作用,特对新型防碰天车装置进行设计改进。
1 结构原理
1.1工作原理
电子防碰天车选用性能稳定、使用寿命长,处理速度快的西门子S7-300PLC作为处理单元,配置高速计数单元,如图1控制示意图和图2钻机示意图所示,在钻机绞车低速或者高速端导气龙头连接口处安装高速编码器,检测绞车的旋转速度和游车高度,通过屏蔽电缆将编码器连接到电子防碰天车控制箱。通过对PLC进行编程,和画面组态及合理线路设计,控制电磁阀的通断,以实现游车的上碰下轧紧急刹车保护和提前预警功能。采用触摸显示屏,实时显示游车高度、游车位置、离天车、转盘距离、刹车状态,可视化设置防碰天车的上碰下砸保护高度、设置预警高度及相关参数。
1.2结构示意图
1.3保护功能
当游车达到设置的上或下保护预警位置时,电子防碰控制箱报警器响起,同时显示屏上的报警指示灯闪烁,提醒操作者采取减速刹车;当游车继续移动到设置的上碰下砸保护点时,电子防碰控制箱控制电磁阀断电,切断经过电磁阀(常开式,通电导通)到刹车放气阀气源,经过刹车放气阀到二位三通气控阀(钻机出厂设计为常开式)的控制气断开,切断由主气源经过二位三通气控阀到高低速控制阀和刹车气源的气源,以实现高低速离合器断气和盘刹(盘刹装置出厂设计为断气刹车)断气刹车,从而实现游车的上碰下轧紧急刹车保护功能。
2 参数选型
2.1绞车参数计算
参考70LDB钻机6正2倒档绞车参数,绞车6档转速最高为448r/min,钩速为1.91m/s。计算绞车频率f:
f=n/t(t:s;f:Hz;n:r/s)
f=448/60=7.47(Hz)

图1 控制示意图

图2 钻机示意图
为了提高检测精度,选用1024增量编码器检测滚筒的转速和游车高度,则编码器的最大检测频率:
fe=1024×f=1024×7.47=7649.28(Hz)≈7.7(kHz)。
2.2PLC及编码器选型
在满足功能要求及保证可靠、维护方便的前提下,根据经济适用、性能稳定、性能价格比最佳的原则。PLC选用带集成数字量输入和输出的紧凑型CPU312C。CPU312C主要参数:10点输入,6点输出,最大计数频率10kHz,温度0℃~60℃。编码器选用高分辨率增量式旋转光电编码器。
2.3画面设计
根据现场要求和操作简单的原则,设计3个画面:初始画面、参数设置画面、运行画面。当系统上电后进入初始画面,在该画面显示通讯状态和设备相关信息,同时在该画面设置进入参数设置画面和运行画面控件,点击相关控件进入对应画面。在参数设置画面内设计系统上防碰高度、报警高度、下保护高度、下报警位置、参数校验等相关初始参数设置控件,对系统初始参数和保护参数进行设置,同时在该画面设置进入初始画面和运行画面控件,点击相关控件进入对应画面。运行画面内设置实时高度显示框、刹车状态、报警灯及游车状态动画,实时显示游车位置和刹车、报警状态。达到对游车位置的实时显示和及时报警提醒功能。
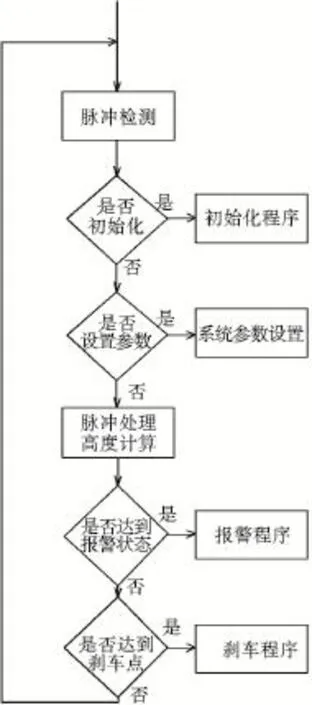
图3 程序流程图
2.4程序设计
系统上电后进入主程序,如图3程序流程图所示,程序对计数脉冲进行计算处理,便于在相关子程序中调用,通过条件分别调用初始化、参数设置、刹车、报警子程序。
初始化子程序完成计数脉冲清零,计数器置零,PLC输入、输出点复位;参数设置子程序完成游车高度置零、高度校验、上碰高度设置、下保护高度设置、上报警位置设置、下报警位置设置;主程序中通过游车的实时高度与报警高度设置值进行比较调用报警子程序,通过PLC输出控制中间继电器,导通声光报警器;主程序中通过游车的实时高度与上碰高度、下保护高度设置值进行比较调用报刹车程序,通过PLC输出控制中间继电器,使图1中的电磁阀失电,切断经过电磁阀(常开式,通电导通)到刹车放气阀气源,从而实现游车的上碰下轧紧急刹车保护功能。
3 运行试验
通过调试,装置运行正常,由于系统受钢丝绳的受力伸长量的影响,在重载和轻载情况下上碰高度、下保护高度、报警点略有变化,在空载和最大钩载200t情况下最大误差为4cm,能够满足现场使用要求。模拟断电重起,CPU能够从上次断电点进行高度检测,不需要从设置零点和高度防碰点。在使用过程中只需要设置一次零点时和防碰点时,系统会自动保存,无需经常设置,只需偶尔校对零点即可。通过现场2个月的连续运行,系统运行正常,报警、刹车正常及时,运行可靠,未出现故障和零点跳变现象。
4 结论
综合调试情况和其他类似设备的使用情况分析,随着PLC运用技术的成熟,利用目前性能稳定的PLC和编码器设计防碰天车系统运行稳定性、抗干扰能力强,操作简单,安装方便。
TE2
B
1004-5716(2016)09-0071-03
2015-10-05
2015-10-22
马燚松(1982-),男(土家族),重庆人,工程师,现从事石油钻井现场钻井设备管理、配套、维修工作。
