舰船电场传感器水下定位方法
2016-09-20张海鹏赵诗玥程峥华
张海鹏, 赵诗玥, 程峥华
(1. 海军潜艇学院 动力操纵系, 山东 青岛 266042; 2. 海军装备研究院, 北京 100161; 3. 92730部队)
舰船电场传感器水下定位方法
张海鹏1,2,赵诗玥2,程峥华3
(1. 海军潜艇学院 动力操纵系, 山东 青岛 266042;2. 海军装备研究院, 北京 100161;3. 92730部队)
为提高船舶电场传感器在水下测量电场时的定位与姿态测量精度,设计了舰船电场传感器新型水下姿态位置测量装置,提出了利用该装置测量舰船电场传感器水下姿态位置的方法,并研究了水下姿态位置数据处理方法和位置、姿态计算方法。通过对水下姿态位置测量装置的测量误差分析,所设计的测量方法位置精度可控制在1m之内,是一种有效的船舶电场传感器水下定位与姿态测量方法。
水下定位;姿态测量;电场;传感器
随着降噪技术和消磁技术的快速发展,舰船已变得越来越安静,为探测噪声已降的很低的舰船,需要寻找新的可被远程探测的舰艇特征信号。舰船电场作为舰船探测技术关注的一种显著的新型舰船特征信号,容易被用来对舰船进行探测、跟踪、定位和打击[1]。俄、美、英和加拿大等发达国家已在舰船电场研究领域取得了相当的成就,苏联可利用电场搜索水下沉底目标[2],北约国家装备电场传感器测量电场,加拿大海军对许多电场特征信号进行了测量[3]。西方国家已有了电场扫雷具,瑞典和美国联合研制了水下电势装置[4]。澳大利亚研制的扫雷系统可精确模拟目标舰船电磁场[5]。为填补技术空白,近年来我国积极参与了电场测量领域的研究。分析可知影响目前水下测量精度的因素主要有2个:(1) 在海流、海浪、布放船颠簸等影响下,很难确定电场传感器落点的准确位置;(2) 如果海底不平坦,会严重影响电矢量方向的确定。因此,我国船舶电场传感器在水下测量电场时的定位与姿态测量数据误差非常大,远远不能满足目前研究需要,成为阻碍我国船舶水下电场研究的一个瓶颈,亟待解决。
1 水下姿态位置测量装置与方法
1.1水下姿态位置测量装置设计
针对影响水下测量精度的两大因素,提出船舶电场防护中电场传感器姿态位置测量方法。用于测量舰船电场的电场传感器位于一个由3根支杆相互正交形成的支架上。测量装置与电场传感器所处的支架固连,从而保证电场传感器与测量装置之间的位置相对固定,如图1所示。
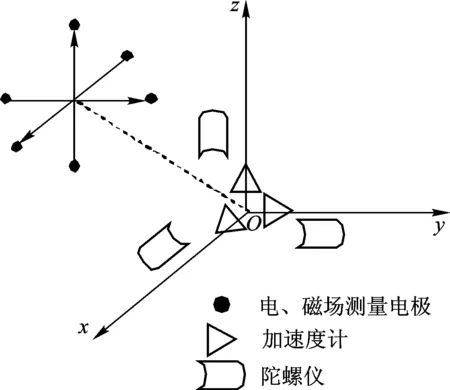
图1 水下姿态位置测量装置示意图
测量装置采用如下方法设计:选取一个由3根相互正交的支杆组成的支架,该支架形成三维正交坐标系,即形成一个导航坐标系Oxyz;在每一坐标轴正方向的支架上设置一个加速度计,且每个加速度计敏感轴与其所处的坐标轴重合;在每个坐标轴正方向的支架上固连一个陀螺仪,且每个陀螺仪敏感轴与其所固连的坐标轴平行。
在实验室测量出各传感器的安装夹角,确定出电场传感器与测量装置的相对姿态和位置,如图1中虚线所示。因此当获取了测量装置的位置与姿态时,便可以唯一确定船舶电场传感器的位置与姿态。
1.2水下姿态位置数据的测量方法研究
如图2所示,根据水下姿态位置测量装置的设计特点,研究提出本装置测量方法:
1) 将所述测量装置置于水中,并在预设的t时间内保持不动;
2) 利用测量船、绳缆等工具迅速回收本测量装置,尽量在2min之内将本装置拉出水面;
3) 在测量装置拉出水面时,立即将载波相位差分GPS定位装置安装在本测量装置的某个确定位置上。
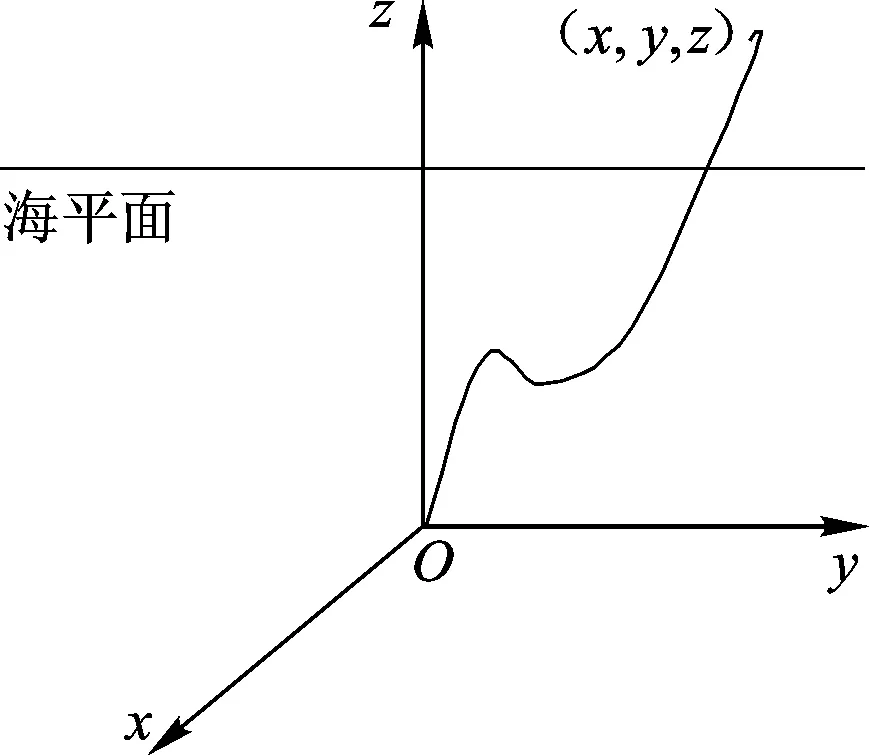
图2 测量装置出水路径示意图
本装置预设的时间t为10min以上,该装置保持静止不动10min后,即可保证姿态测量精度优于0.005°。若保持静止时间更长,则姿态测量精度更高。
1.3水下姿态位置数据处理方法研究
1.3.1初始姿态计算方法分析
姿态计算时,参考捷联惯性导航初始对准中的粗对准技术,一般即可得出满足精度的初始姿态。数据处理时,利用2个水平加速度计测量重力加速度在坐标轴Ox和Oy上的分量,从而确定坐标系的Oxy平面与大地坐标系的夹角;利用陀螺仪测量地球自转角速度确定该坐标系(导航坐标系)与地球北向的夹角。如果粗对准精度不能满足要求,可以采用精对准技术[6],利用卡尔曼滤波技术,提高姿态矩阵的精度。
1.3.2位置计算方法分析
位置计算时,基于GPS定位装置生成的表示测量装置位置的GPS数据,对陀螺仪和加速度计输出数据的运算结果进行逆运算,获取船舶电场传感器的位置,其中逆运算在后面给出了详细的运算步骤。
数据处理时,在坐标系Oxyz中设本测量装置在水下布放的位置为(0,0,0)点,当初始对准完成后,即可知道本测量装置在水下布放的姿态。当测量任务完成后,在本装置回收过程中,利用捷联惯性导航算法,可以解算出其运动轨迹上任意点在坐标系Oxyz中的位置,并最终解算出本装置出水后、GPS安装完毕时本装置在坐标系Oxyz的位置(x,y,z)。此时解算的位置均相对于参考点为本测量装置在水下布放的位置点(即坐标系原点(0,0,0))的位置。同时,当本装置出水后,GPS可以给出本装置在大地坐标系中的精确位置(xd,yd,zd),其误差在厘米级。利用本装置在大地坐标系中的位置(xd,yd,zd)与GPS放置完毕时计算出的位置(x,y,z)进行比较,逆运算反推出本装置回收过程中其运动轨迹上任意点在大地坐标系中的位置,也可以反推出本测量装置布放在水下保持静止状态时在大地坐标系中的位置。
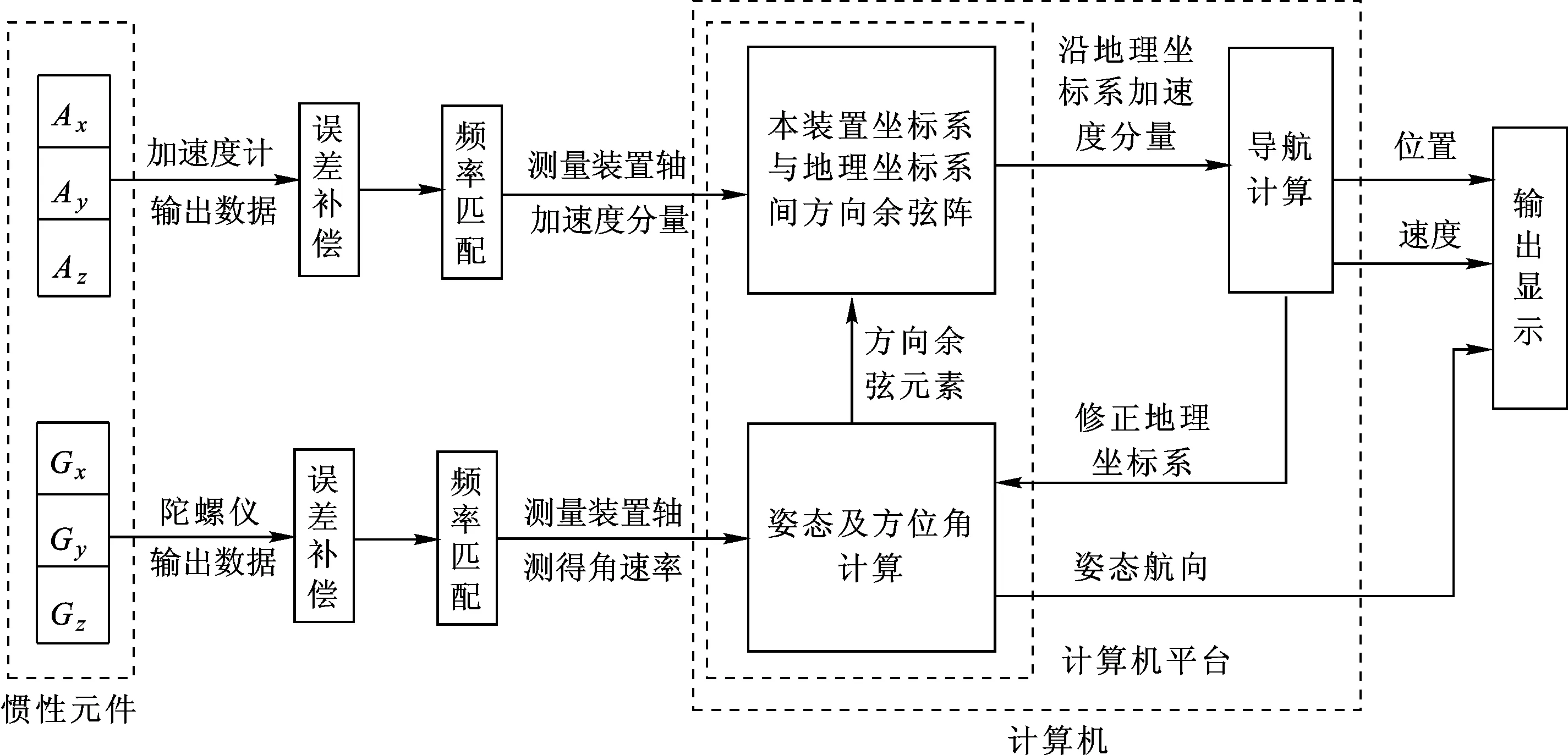
图3 逆运算流程示意图
1.3.3逆运算方法分析
在位置计算时,需要用逆运算反推出本装置回收过程中的运动轨迹。逆运算过程参考捷联导航运算方法[7],流程如图3所示。
1) 将测量装置在水下布放的位置设为位置原点(0,0,0),将姿态计算结果作为初始姿态和方位角,得出捷联解算的初始姿态矩阵。
2) 根据测量装置拉出水面过程中陀螺仪和加速度计生成的数据,计算出测量装置拉出水面并安装完毕GPS时,测量装置相对于原点的位置(x,y,z)。
3) 将GPS测量的本测量装置相对于大地的位置(xd,yd,zd)与本测量装置相对于坐标系(Oxyz)的位置(x,y,z)进行比较,获取位置差(Δx,Δy,Δz),所述位置差即为测量装置在水下布放的相对于大地坐标系的位置,继而根据该位置获取船舶电场传感器的位置。
2 水下姿态位置测量装置的误差分析
假设本装置选用的石英加速度计精度为30μg,初始对准10min,选用U50型激光陀螺仪(精度为0.01°/h),载波相位差分GPS误差为2cm,回收本装置时间为2min。
惯性导航误差的经验公式[8]为

分析该公式可知,Δs受时间t的影响很大。时间t越短,误差Δs越小,应用本测量方法得出的位置精度越高;反之,时间t越长,误差Δs越大,应用本测量方法得出的位置精度越低。
一般的,加速度计精度为30μg,初始对准10min后,初始对准姿态误差为0.005°,则导航误差为
Δs=0.005×20+(30×10-6×1202)/2+
(0.01/(3 600)×1203)/6≈1 m
如果要提高测量精度,需减小本装置开始运动到出水的时间,若能控制在1 min内,则导航误差为
Δs=0.005×20+(30×10-6×602)/2+
(0.01/(3 600)×603)/6=0.254m
3 结 束 语
本文提出的测量舰船电场传感器水下姿态位置新方法,能够准确地确定电场传感器系统在水下的位置和姿态,从而为校正测得的电场方向和确定测得的电场位置提供依据,其位置测量精度可控制在1m之内,是一种船舶电场传感器水下定位与姿态测量的有效方法。
References)
[1]林春生, 龚沈光.舰船物理场[M]. 北京:兵器工业出版社, 2007:233-256.
[2]杨国义.舰船水下电磁场国外研究现状[J].舰船科学技术,2011(12):138-141.
[3]郑军林,吴宏,杨东升.舰船电场研究概况[J].舰船工程研究,2007(2):24-27.
[4]刘进.瑞典和美国联合研制扫雷艇[J].水雷战与舰船防护,1996(2):8-11.
[5]夏立新. 轻型多感应扫雷系统[J].水雷战与舰船防护,2001 (3):12-13.
[6]高伟,奔粤阳. 捷联惯性导航系统初始对准技术[M].北京:国防工业出版社,2014:65-72.
[7]刘危.基于MEMS的低成本MIMU的应用研究[D].长沙:国防科学技术大学,2008:45-48.
[8]吴俊伟,曾启明,聂莉娟.惯性导航系统的误差估计[J].中国惯性技术学报,2002(6):1-5.
(编辑:李江涛)
MethodofUnderwaterPositioningofElectricFieldSensorforShip
ZHANGHaipeng1,2,ZHAOShiyue2,CHENGZhenghua3
(1.DepartmentofDynamicsControl,NavySubmarineAcademy,QingdaoShandong266042,China;2.NavyEquipmentResearchInstitute,Beijing100161,China;3. 92730Troops,China)
Toimproveprecisionofunderwaterpositioningandattitudedeterminationofelectricfieldsensoroftheship,thepaperdesignsanewmeasuringdevice,proposesmeasuringmethodwithsuchdeviceforunderwaterpositioningandattitudedetermination.Then,thepaperdiscussesdataprocessingmethodandpositionandattitudecomputationmethod.Throughanalysisonmeasurementerrorofthisdevice,thepaperdesignsapositionmeasuringmethodwithprecisionwithin1masaneffectivemethodofunderwaterpositioningandattitudedeterminationofelectricfieldsensor.
underwaterpositioning;attitudedetermination;electricfield;sensor
2015-08-31
国家自然科学基金资助项目(51377169)
张海鹏(1977-),男,讲师,博士,主要研究方向为精密仪器及机械。fdrk01@163.com
TM154.2
2095-3828(2016)04-0093-03
ADOI10.3783/j.issn.2095-3828.2016.04.019
