自动气象站风速风向两种计算方法的比较
2016-09-18李昕娣黄飞龙
李昕娣,黄飞龙
(广东省气象探测数据中心,广东广州 510080)
自动气象站风速风向两种计算方法的比较
李昕娣,黄飞龙
(广东省气象探测数据中心,广东广州510080)
以广州萝岗观测场同时运行的DZZ1-2型和DZZ1-2N型2套采用不同算法的自动站为研究对象,以风速、风向传感器的计算方法为例,获得8 688组采样数据,对比分析了新旧2种算法得出的计算结果,列出差值分布概率和相关性,得出新旧2种算法差值分布概率一致、计算结果强相关,且新算法采用加权平均以固定步长计算滑动平均值的方法,解决了原算法3 s滑动平均值计算的不合理性,因此可以替代原算法应用于新型自动气象站。
风速;风向;自动气象站
李昕娣,黄飞龙.自动气象站风速风向两种计算方法的比较[J].广东气象,2015,38(4):46-48.
现代气象业务对综合气象观测提出了更高的要求,现有自动气象站在观测能力上存在着严重不足、技术落后,观测仪器功能规格不统一、型号繁多。我国近十年来地面气象观测站网大量使用自动气象站和自动气候站考核,取得了许多成功的经验,为实现多功能、全要素、统一型号的新型自动气象(气候)站提供基础。中国气象局综合观测司要求自动站生产厂家以《新型自动气象(气候)站功能需求书》(2012修订版)为标准,组织研发、生产型号统一的自动气象站。《地面气象观测规范》(2003版)[1]和《新型自动气象(气候)站功能需求书》(2012修订版)[2]中对自动气象观测系统中的风速、风向计算方法有不同的规定,为了对2种算法进行比较,本研究以广州萝岗观测场同时运行的2套自动站为研究对象,获得8 688组观测数据,分别采用不同算法对风速、风向采样数据进行处理分析。
1 不同算法
《地面气象观测规范》(2003)版(以下简称“旧算法”)与《新型自动气象(气候)站功能需求书》(2012修订版)(以下简称“新算法”)中对风速、风向的计算方法不同,具体规定见参考文献[1-2]。
1.1风速算法
2种版本的风速计算方法具体规定见表1。新算法较原算法在采样频率、3 s滑动平均值、滑动平均方法计算公式均有较大改变。
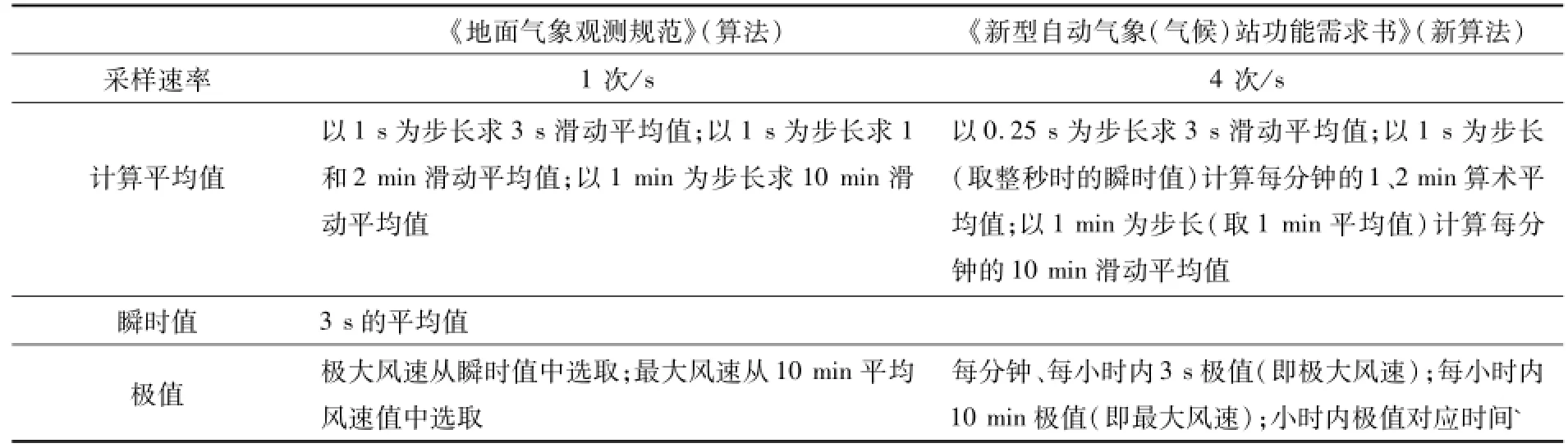
表1 自动气象站新旧风速计算方法对比
1.2风向算法
1)旧算法中的规定。
风向采用滑动平均算法,计算公式与风速算法相同。计算:若E>180°,则从E中减去360°;若E<180°,在E上加360°。再用此E值重新计算,若新计算的>360°,则减去360°;若新计算的<0,则加上360°。
2)新算法中的规定。

其中WD为观测时段内的平均风向(°);Di为观测时段内第i个风矢量的幅角(与轴的夹角)(°);为观测时段内单位矢量在轴(西东方向)上的平均分量(°);为观测时段内单位矢量在轴(南北方向)上的平均分量(°);N为观测时段内的样本数,由“采样频率”和“平均值时间区间”决定。
1.3新旧算法合理性的比较
2)新算法公式计算1 min平均风速和2 min平均风速时使用算术平均法,计算3 s平均风速、10 min平均风速时采用滑动平均法,以移动的平均样本时间为滑动区间;风向计算公式采用单位矢量平均法,并对平均风向进行修正。
2 数据对比
2.1获取采样数据
对比试验采用的方法是在同一观测场地同时运行分别采用新旧2种算法的两套自动站,连续采集8 688组数据,每组数据均包括2 min平均风向、2 min平均风速、10 min平均风向、10 min平均风速和分钟内最大瞬时风速,将此8 688组数据作为对比观测数据进行分析[4-6]。
2.2新旧算法数据的对比差值
对比差值是新算法与旧算法采集的8 688组数据观测值之差(对比差值=新算法观测值-旧算法观测值),直接反映了2种算法采集数据之间的偏差[7]。2和10 min平均风向示值新算法观测值略大于旧算法观测值,平均对比差值为16°;2和10 min平均风速旧算法观测值略大于新算法观测值,但是2者对比差值较小,平均小于0.2 m/s(见表2)。

表2 新旧算法观测数据的对比差值
2.3新旧算法对比差值概率分布
由新旧算法观测数据的对比差值在不同数据段的概率分布可以看出,2和10 min平均风向对比差值在20°以内的概率达到88%、在30°以内的概率为98%(见表3);2和10 min平均风速和分钟内最大瞬时风速的对比差值在0.1 m/s的概率分别为40%、37%和38%;在0.4 m/s以内的概率达到92%、93%和93%(见表4)。

表3 风向差值在不同数据段的概率分布 %

表4 风速差值在不同数据段的概率分布%
2.4新旧算法数据的相关性分析和显著性检验
将广州萝岗平行对比观测期间由新旧2种算法采集到的风速、风向数据进行分析,得到8 688组对比观测数据,其中2、10 min平均风速的相关系数为0.97,2、10 min平均风向的相关系数为0.99,说明新旧2种算法的观测数据强相关[8-9]。
对新旧算法采集的数据进行F-检验双样本方差分析[10]可得除10 min平均风向新旧算法F值超出临界值外,2 min平均风向、风速、10 min平均风速和分钟内最大瞬时风速均不存在显著性差异。
3 同组数据不同算法的比较
为了对2种算法直观的比较,选取萝岗观测场新型站2015年5月10日09:01—11:00 2 h内的瞬时数据作为采样数据。新算法采样频率为4次/s,每分钟共得240个数据;旧算法采样频率为1次/s,将上述采样数据的每整秒数据作为旧算法参考采样数据,每分钟共计60个。
选取其中的10组数据(10 m/s以下),计算结果如表5。

表5 (1~10 m/s)风速新旧算法误差m/s
由上面一组从1~10 m/s变化区间的平均风速数据可知,1、2和10 min平均风速新旧2种算法结果一致;分钟内3 s极大风速有较大差异,差异原因在于新算法采样频率为4次/s且算法以0.25 s为步长计算3 s滑动平均值;旧算法采样频率为1次/s,以1 s为步长计算3 s滑动平均值。新算法较旧算法采样数据多3倍,采样频率的增大和步长的减小可以将采样值平滑计算,既保留实际风速中极大值出现的可能,又避免因为极大值引发的数值突变。风向采集数据分析结果同上。新算法更合理、更有效地实现了真实数据的采集。
4 结论
该次对比试验采用连续采集的8 688组采样数据,数据分析表明,尽管存在一定偏差,但整个研究时段内新旧2种算法观测数据序列的相关性在2和10 min平均值均表现显著。
1)该次对比试验在同一观测场安装两套检定合格的风速风向传感器,采集器分别为使用旧算法的DZZ1-2型和使用新算法的DZZ1-2N型。鉴于传感器本身存在性能误差,依据气象行业标准QX/T1-2000的要求,选取最大误差均为2°的2支风向传感器作为试验用风向传感器;在仪器检定合格后对风速检定点的散点数据拟合,选取生成的线性回归方程一致的两支风速传感器作为试验用风速传感器,以降低传感器本身存在的误差对试验结果的影响。
2)2和10 min平均风向均出现超过100°的极大差值,分析出现的原因有以下几方面:(1)风向传感器安装在风杆上时是根据指北针的方向定位,但是由于人工安装,会出现人工操作3°~5°的安装误差,导致风向有偏差,根据气象行业标准QX/T1-2000的要求,5°以内的风向误差是允许的;(2)风向角度在0°/360°左右摆动时会出现大于300°的差异,这是由于风向过零时采样数据示值造成的,本次对比数据在计算公式中加入判断条件以避免这种误差值。
3)新算法以0.25 s为步长计算3 s滑动平均值,整数倍增加了原算法的采样频率,可得到更有效的结果,计算公式抛弃了原算法的迭代计算方法,而采用加权平均以固定步长计算滑动平均值的方法,解决了原算法3 s滑动平均值计算的不合理性。
新型站风向风速计算可用新算法全面替代原算法,以提高观测数据的准确性,实现可靠的量值传递。
[1]中国气象局.地面气象观测规范[S].北京:气象出版社,2003.
[2]中国气象局.新型自动气象(气候)站功能需求书[S].北京:中国气象局,2012.
[3]王永林.对地面自动气象观测系统风速滑动平均计算方法的探究[J].气象研究与应用,2009,30(2):75-77.
[4]杨伍琳,赵晓利,罗祖红,等.两套不同型号自动气象站采集的气象数据的差异[J].广东气象,2008,30(3):49-50.
[5]陈其欢.风传感器及采样计算方法研究与应用[J].气象水文海洋仪器,2013,30(4):8-13.
[6]曾书儿.风速风向的矢量平均方法[J].气象,1983,19(6):83-85.
[7]王志春,宋丽莉,何秋生,等.风速随高度变化的曲线拟合[J].广东气象,2007,29(1):13-15.
[8]黄浩辉,宋丽莉,植石群,等.重现期风速风压计算系统介绍[J].广东气象,2009,31(3):1-3.
[9]黄锦速,江冰云,黄美纯.汕头自动气象站与人工站测风资料对比分析[J].广东气象,2008,30(SⅡ):81-82.
[10]蒋承霖,黄浩辉,植石群.广东地区大风拟合的实用性研究[J].广东气象,2010,32(2):8-10.
P49
A
10.3969/j.issn.1007-6190.2016.04.011
2015-10-15
李昕娣(1982年生),女,硕士,工程师,从事气象仪器计量检定工作。E-mail:cinderella_lee106@126.com
