基于方差分解的一类非线性串级控制系统性能评估
2016-09-18王雅斌孙京诰
王雅斌, 孙京诰
(华东理工大学信息科学与工程学院,化工过程先进控制和优化技术教育部重点实验室,上海 200237)
基于方差分解的一类非线性串级控制系统性能评估
王雅斌,孙京诰
(华东理工大学信息科学与工程学院,化工过程先进控制和优化技术教育部重点实验室,上海 200237)
最小方差下限代表在输出方差方面控制系统所能达到的最优性能。对于一类存在过程非线性的串级控制系统,传统的线性系统评估方法会造成最小方差下限估计值过大。首先证明一类表示为面向块模型的非线性串级控制系统最小方差下限的存在,其仅与若干主、副回路扰动项有关;然后通过系统输入输出数据建立多项式模型近似描述非线性串级控制系统,利用方差分解公式,采用蒙特卡罗方法进行统计模拟实验,估计这些扰动项对输出总方差的贡献量,进而确定最小方差下限估计值;最后通过与线性评估方法的比较,表明了该方法估计此类串级控制系统性能的有效性和正确性。
性能评估; 非线性; 面向块模型; 串级控制; 方差分解
控制系统性能评估用来判断当前控制系统的性能是否良好,及时发现工作状态不良的控制系统,保证生产的正常并预防安全隐患[1]。Harris[2]首先证明了线性单回路控制系统输出最小方差的存在,由于这部分输出量与控制器的作用无关,称之为反馈不变量。此后,众多学者研究了多变量系统、时变扰动系统、先进控制系统以及改进的性能评估策略[3],但大多是针对线性单回路控制系统。
串级控制系统能够提高系统的动态响应性能,有效地克服回路扰动,得到了广泛的应用。关于串级控制系统性能评估的研究较少,文献[4]则研究了基于最小方差准串级控制系统的性能评估; 文献[5]研究了基于最小方差准则的串级系统故障诊断; 文献[6]将广义最小方差准则应用到串级控制系统性能评估。这些研究都是针对线性串级控制系统。
非线性特征在控制系统中广泛存在,主要表现在控制过程的非线性、测量传感器的非线性、阀门的黏滞等特征[7-8],这些非线性特征使得传统的线性控制系统评估方法产生估计偏大的问题。文献[9]首先针对非线性动态模型和线性扰动叠加的一类单变量单回路非线性系统,证明其输出最小方差下限的存在,采用多项式拟合的方法研究了其性能评估问题,但由于非线性串级控制系统具有主回路、副回路两个输入扰动,并不满足其关于噪声可表示为输出叠加的前提,因此该方法不适用于非线性串级控制系统。文献[10]采用ANOVA-like方差分解,基于NARMAX(Nonlinear Autoregressive Moving Average with Exogenous Input)模型,计算了单变量单回路的前k(系统延迟步数)个扰动项对输出方差的贡献量,从而得到此类非线性系统的最小方差下限。
基于方差分解的方法是计算每个输入变量对输出总方差的贡献量,其对系统模型没有严格的限制,当系统的最小方差下限不存在时,也可以作为较优的性能指标来使用。本文针对一类带有面向块模型的过程非线性串级控制系统,证明其输出最小方差下限的存在,采用方差分解公式估计其值,最后通过与线性评估方法的仿真比较,说明该方法针对非线性串级控制回路的有效性。
1 过程非线性串级控制系统描述
1.1串级控制系统描述

(1)
(2)
由图1计算得到主回路的输出为

(3)
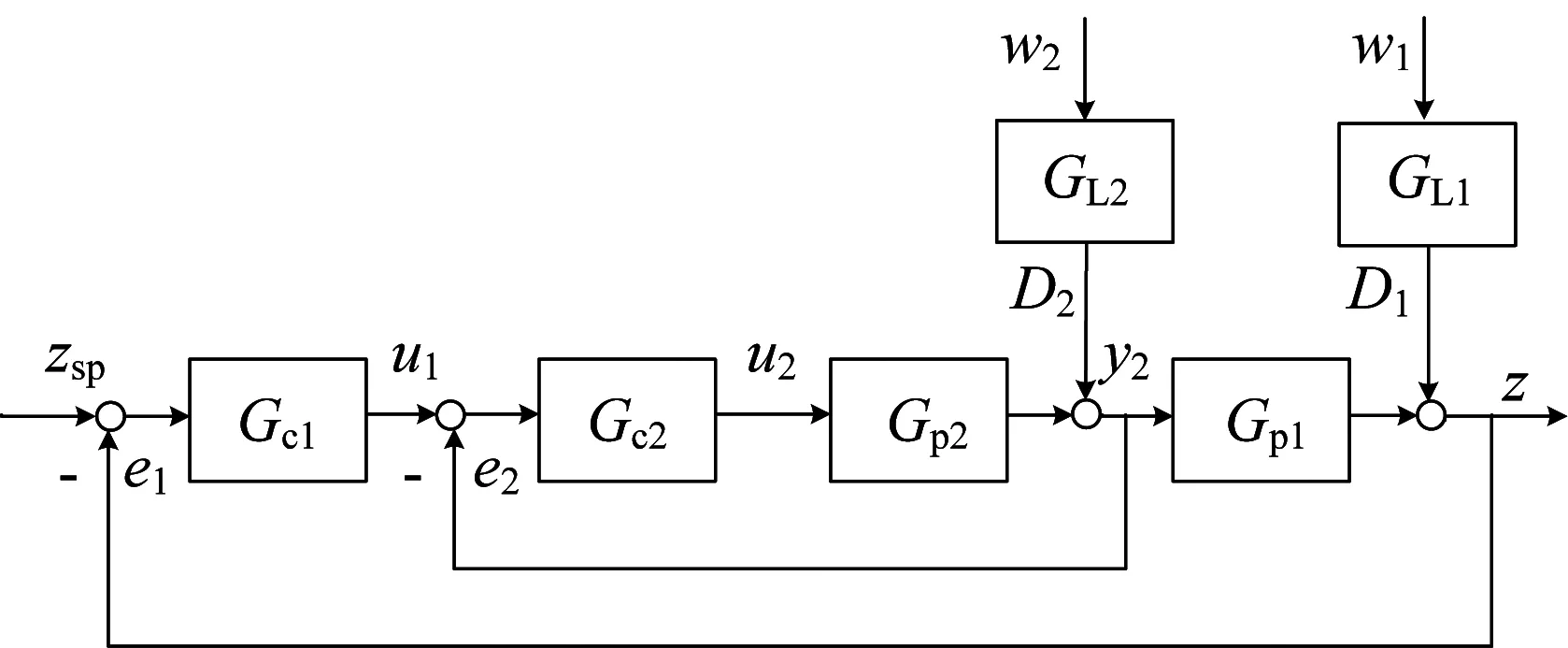
图1 串级控制系统框图Fig.1 Cascade control system block diagram
1.2过程非线性特征描述
控制对象的非线性广泛存在,进行控制系统性能评估时,这些非线性特征无法忽略[8]。许多工业过程非线性可以用面向块的非线性模型充分表示[7]。
图2示出了Hammerstein模型和Wiener模型,两者同时存在时为Hammerstein-Wiener模型。其中Gpq-k、GL分别表示线性过程模型和扰动模型,k为系统延迟步数,静态非线性模块N1和N2由非线性函数表示。
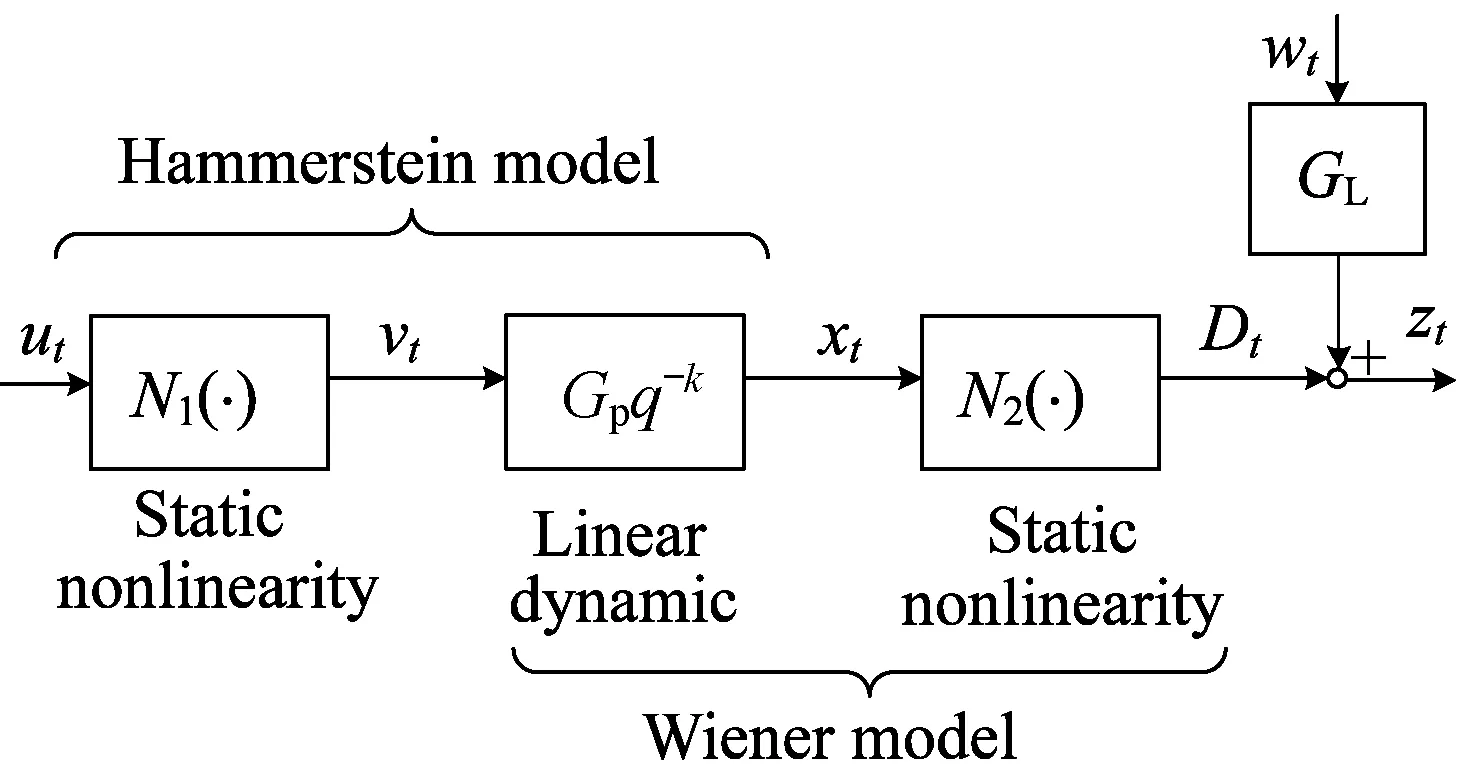
图2 面向块的非线性模型结构Fig.2 Block-oriented nonlinear systems model structure 当串级控制系统带有过程非线性时,式(3)不再是一个线性关系的表达式。实际常用NARMAX模型[11]来表示随机非线性系统

(5)由于控制器的作用取决于zt的过去值,式(5)可以进一步表示为
(6)式(3)是主回路输出的传递函数表达式,式(6)是主回路输出的NARMAX模型表达式,两者是等价的。
2 过程非线性串级控制系统最小方差的存在性
2.1线性串级控制系统最小方差存在性
(7)将式(1)、式(2)、式(7)代入式(3),整理可得
(8)

由式(8)可知,输出的前2项CI11和CI12与控制器无关,不论采用何种控制器,在系统输出中始终存在,即为串级系统输出的反馈不变项; 后2项CD21和CD22与控制器有关,将后2项置为0,系统的输出方差将达到最小,此时可以求得最小方差控制率下的主控制器和副控制器,并且串级系统的主回路输出是一个MA(MovingAverage)过程
(9)若w1、w2相互独立,输出最小方差(MinimumVariance,MV)计算为
(10)由此可知,在最小方差控制的作用下,线性串级控制系统的主回路输出是一个k1+k2-1阶的MA过程,主回路输出可由闭环传递函数的前k1+k2-1项滑动平均系数来表示。对于线性的平稳时间序列,可采用AR(AutoRegressive)、MA和ARMA等模型结构建立由白噪声输入到系统输出的模型关系。由于AR模型计算速度快,且可迭代运算,文献[4]建议采用该模型估计串级控制系统最小方差。
2.2过程非线性串级控制最小方差存在性

(11)在最小方差控制率的作用下,串级控制回路可以克服副回路的过程非线性,但在非最小方差控制的作用下,主回路的输出将含有非线性环节影响的项,可表示为
2.2.2主回路过程中存在非线性主回路过程存在非线性环节时,直接考虑非线性模型为Hammerstein-Wiener模型,即

(14)式(14)的丢番图分解无法直接实现,重新推导主回路的输出表达式:
(15)
式(15)后2项置为0,得到与控制器作用无关的反馈不变项:
(16)
当过程非线性为Hammerstein模型时,反馈不变项仍为式(16)。当过程非线性为Wiener模型时,式(14)不包含N1项,进一步分解:
(17)
将式(17)代入式(15),进一步分离出输出的反馈不变项为
(18)
主回路存在过程非线性,在最小方差控制率的作用下,输出的反馈不变项仍带有非线性环节。由式(9)、式(11)、式(16)、式(18)可知,不论是线性串级控制系统还是过程非线性串级控制系统,其反馈不变项仅与最近k1+k2项主回路扰动及k1步前的最近k2项副回路扰动有关。因此引入方差分解的方法,分析这些扰动项对输出方差的贡献量。
3 基于方差分解的串级控制回路性能指标
3.1ANOVA-like方差分解
一个p输入单输出静态系统,用解析函数Z=f(X1,X2,…,Xp)表示,采用ANOVA-like方差分解[12]公式,输出总方差进行分解:
(19)
其中:
式(19)中的随机输入变量均不相关。E(Z|Xi=xi)是Xi=xi时Z的期望值,V()是遍历xi取值下Z的方差。方差分解公式适用于多输入系统,对输入变量的全集按子集划分也有效。若输入集X划分为W1=(X1,X2,…,Xj),W2=(Xp-j+1,Xp-j,…,Xp),则方差分解公式为
(20)
3.2非线性串级控制系统的方差分解
式(6)是非线性串级控制系统的NARMAX模型,t+k1+k2时刻的输出为
(21)
如图3所示,将上述串级控制系统的主、副回路扰动按时间轴划分为两个部分:A1=[w1,t+k1+k2,w1,t+k1+k2-1,…,w1,t+1,w2,t+k2,w2,t+k2-1,…,w2,t+1]和A2=[w1,t,w1,t-1,…,w1,1,w2,t-1,w2,t-2,…,w2,1],A1、A2分别是t时刻以后和以前的扰动集合。由于副回路扰动对主回路输出的影响延迟k1步,A1中不包含最近k1项副回路扰动。非线性串级控制系统的输出最小方差由输入子集合A1决定。
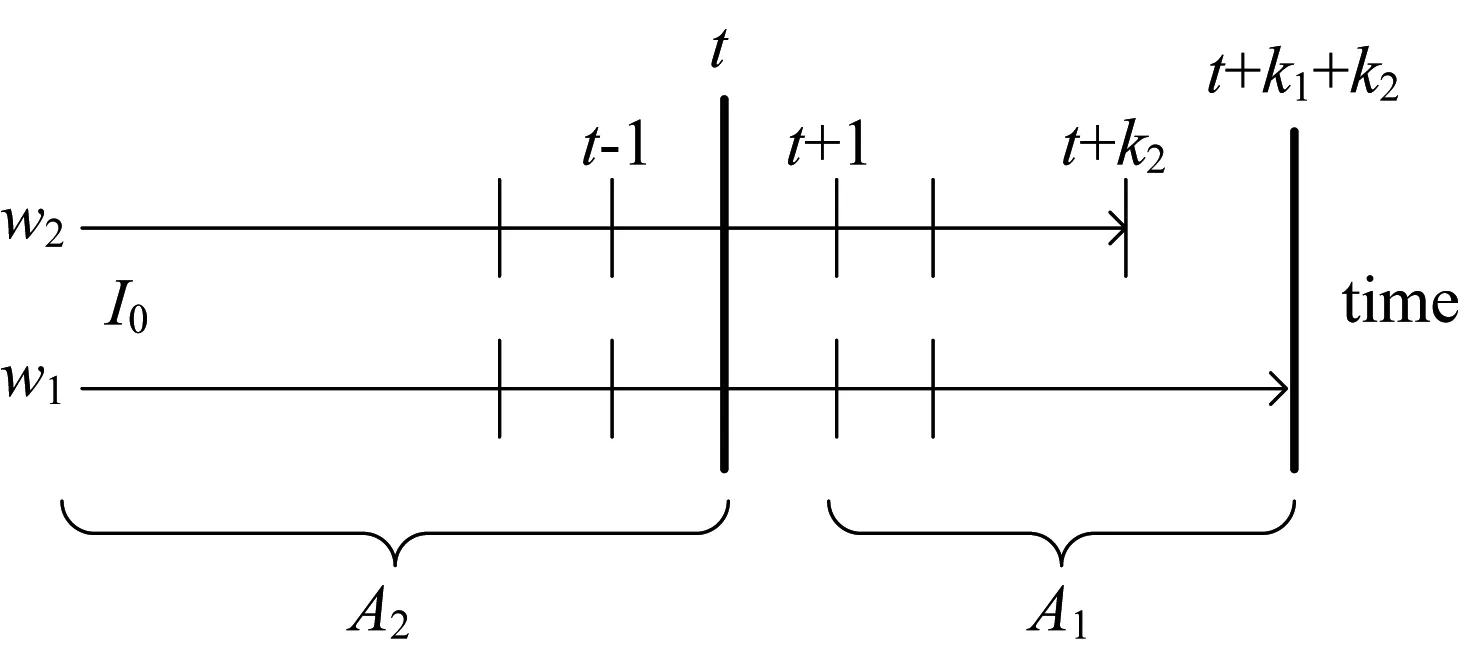
图3 扰动在时间轴上的划分Fig.3 Dividing the disturbance sequences separated in time
由于过程非线性的存在,输出将受初始条件I0的影响,不能直接采用式(20)分解公式。考虑I0,输出zt+k1+k2的方差可分解为两个部分:
(22)
A=[A1,A2]表示从开始时刻进入系统的所有扰动,式(22)的第1项表示I0条件下输入对输出总方差的贡献量的期望值,第2项表示I0的不确定性对总方差的影响。一定的I0条件下,对第1项VA[zt+k1+k2|I0]进行方差分解:
(23)
其中:
EI0[VA1|I0]表示输入扰动集A1对输出总方差的贡献量,串级控制回路的输出最小方差取决于A1,因此其就是输出最小方差的期望值。则过程非线性串级控制系统的性能指标为
(24)

(25)
当t趋于无穷时,近似计算得到τt的值。实际计算中为得到准确估计结果,避免过量运算,t取较大的值,并求取多个t值下的τt的平均值。由于初始条件会对输出产生影响,对于每一个τt应当尽量遍历更多组的输入扰动集,进而计算出当前t值下的最小方差估计值的平均值。
3.3基于方差分解性能指标的计算
3.3.1闭环模型的辨识式(21)是非线性串级控制系统的NARMA模型,对于任一连续的函数可以通过l阶次的多项式模型进行任意的近似[13]。
(26)
其中:θi、et分别表示常数项和偏差项:n=ny+n1+n2,x1,t=zt,x2,t=zt-1,…,xny+1,t=w1,t+k1+k2,…,xn,t=w2,t+k2-n2,即是与当前输出相关的式(21)的输入集的n个输入项。式(27)是一个线性回归模型:
(27)
式中:n0表示输出项的数据长度;pi,t表示由上述n个输入项组成的单项式;N表示所有单项式的总个数;ξt为模型误差。上述模型转为矩阵模型,可以采用正交最小二乘法[13]来求解。式(27)需要输入扰动的信息,如果扰动噪声是可测的,可以通过线性回归的方法对噪声进行拟合,模型残差即可作为扰动噪声源的估计值。如果噪声不可测,可以在正交最小二乘法中引入迭代运算,赋扰动噪声项初值为0,用上一次计算的模型误差代替扰动,迭代运算至合适的精度。
3.3.2蒙特卡罗方法估计蒙特卡罗模拟法是以概率统计理论为基础,通过对随机过程进行反复实验,计算参数估计量和统计量,进而研究其分布特征的方法。对于稳定的遍历性系统,采用模拟实验可计算出可靠的估计值,并且随着模拟次数的增多,估计的精度也会提高。对闭环模型进行统计模拟实验,考虑初始条件,则zt+k1+k2的均值和方差计算为
(28)
(29)

(30)

4 仿真实例
4.1概述
选取文献[4]中一个典型的串级控制回路,为避免存在非线性环节时系统输出出现发散,对主回路扰动模型稍加改动,模型如下:
(31)
串级控制系统设定值为0,主、副回路延迟步数分别为k1=4,k2=1,系统的总延迟步数为k1+k2=5。主、副回路扰动由均值为0、方差为0.1的随机高斯白噪声源w0驱动。系统采用如下主、副控制器:
(32)
图4为该串级控制系统输入输出数据图。从上到下依次为扰动噪声源、主回路扰动、副回路扰动、主回路输出的数据序列。为仿真过程非线性特征,采用下列3个非线性函数(函数如图5所示):
(33)
分4个例子,基于线性时间序列模型方法[4]和本文方法,对比分析过程非线性串级控制系统输出最小方差下限的估计。
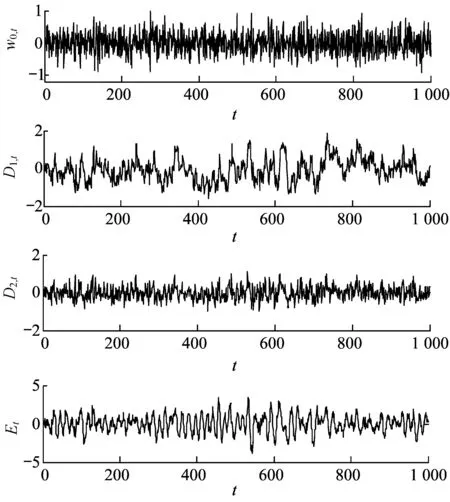
图4 系统输入输出数据Fig.4 System input and output data
4.2线性串级系统
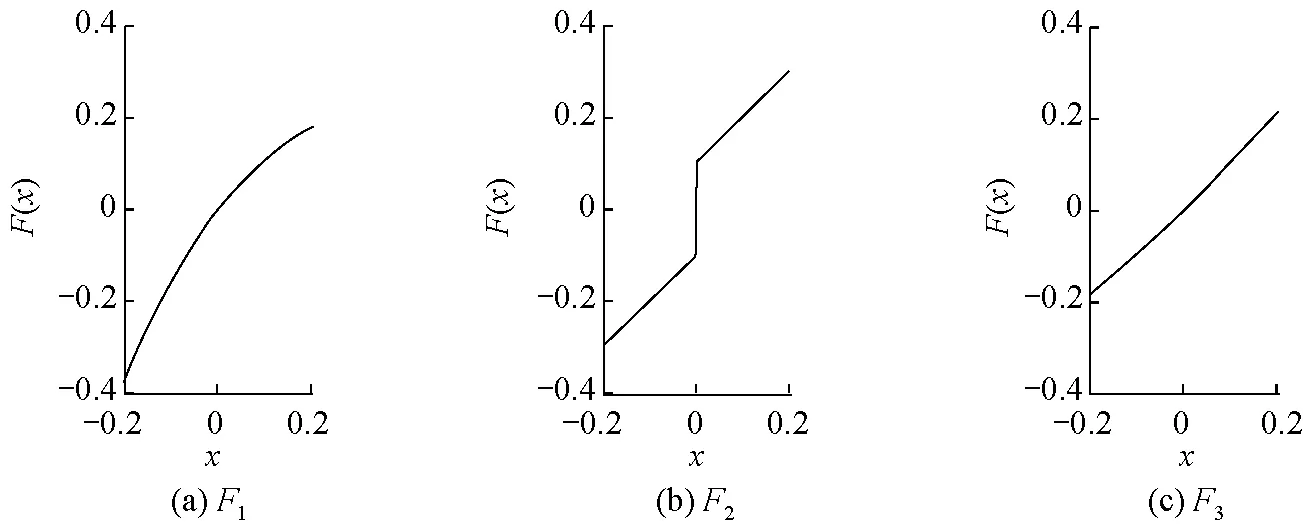
图5 非线性函数Fig.5 Non-linear function
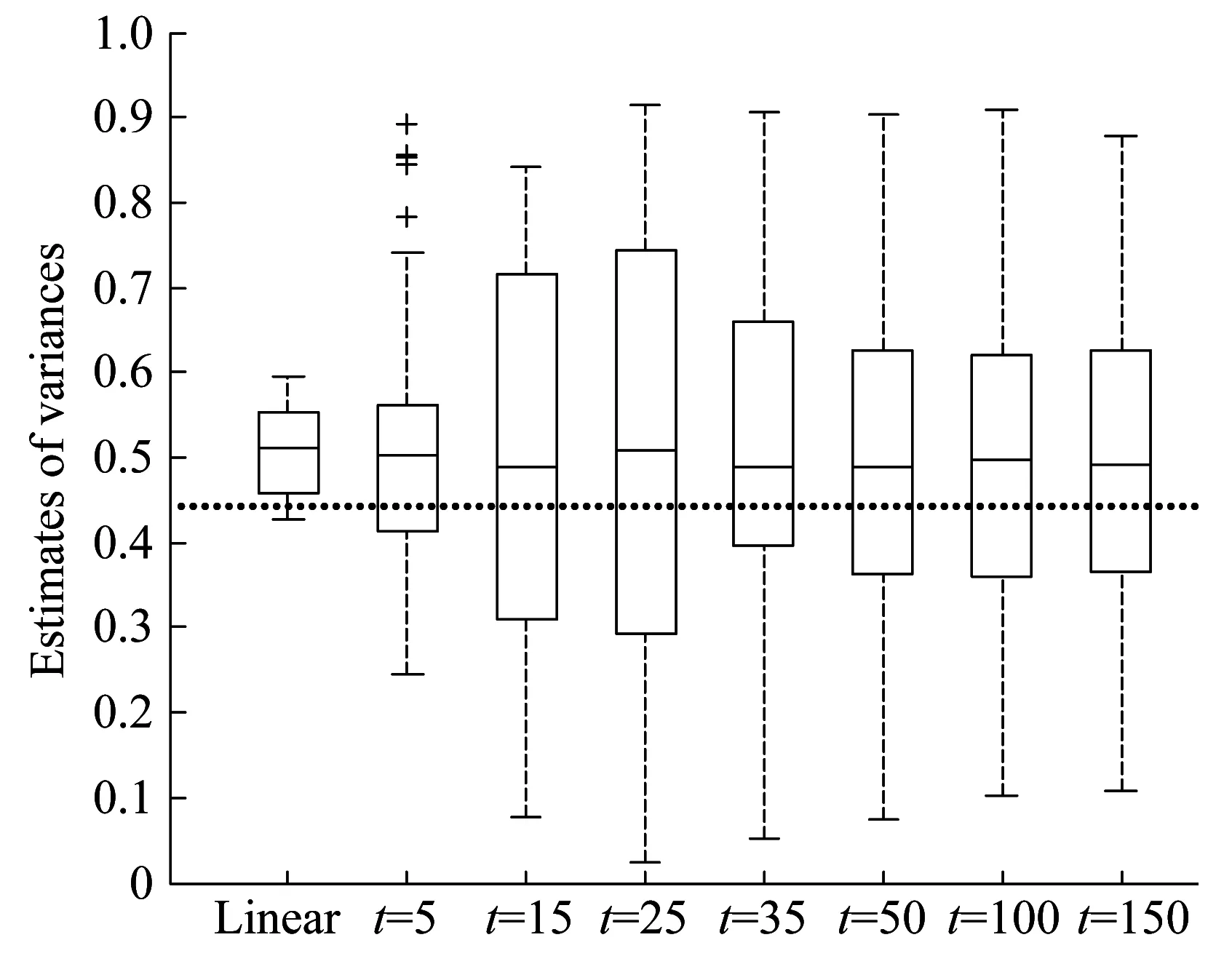
图6 线性系统最小方差估计盒图Fig.6 Box plots of linear system minimum variances estimates
由图6可知,线性方法和本文方法估计得到的值都比较接近于理论值。线性估计方法的结果的分布比较集中,而本文方法由于采用大量的输入实验,输出的分布在局部上带有不确定性,可以发现,在不同的时间长度t下输出的总体分布是一致的,且中位线上下的数据分布较平均。
4.3过程非线性串级系统
4.3.1副回路非线性过程例2为式(31)所示的串级控制系统,副回路存在Hammerstein模型,即在副回路线性过程前存在非线性环节N1(x)=F1(x),其他模型条件不变。计算得到理论上的最小方差值为0.442 8。VA1|I0实验估计结果如图7所示。
4.3.2主回路非线性过程例3为式(31)所示的串级控制系统主回路存在Wiener模型,即在主回路线性过程后存在非线性环节N2(x)=F3(x),其他模型条件不变,计算得到理论上的最小方差值为0.481 3。VA1|I0实验估计结果如图8所示。

图7 副回路非线性系统最小方差估计盒图Fig.7 Box plots of non-linear secondary loop system minimum variances estimates

图8 主回路非线性系统最小方差估计盒图Fig.8 Box plots of non-linear primary loop system minimum variances estimates
4.3.3主副回路均带有非线性过程例4为式(31)所示的串级控制系统副回路存在Hammerstein-Wiener模型,副回路线性过程前、后分别存在下列非线性环节:N11(x)=F2(x),N12(x)=F3(x); 主回路仍旧选取Wiener模型,因为此模型下的理论最小方差值易于计算,其非线性环节为N22(x)=F3(x); 其他模型条件不变,计算得到理论上的最小方差值为0.481 3。VA1|I0实验估计结果如图9所示。

图9 主副回路非线性系统最小方差估计盒图Fig.9 Box plots of non-linear primary and secondary loop system minimum variances estimates
从例2~例4可以发现,线性方法在评估过程非线性串级控制系统时,出现了明显的过大估计,已经完全不能作为有效的最小方差估计值。图6~图9中,t=5时的分布盒图表明,t非常小时,系统的输出特性并未完全体现;t值较小时,如为15、25时,估计方差的分布总体相对偏大,这是由于非线性系统的输出方差和初始条件有关;t大于50之后,总体方差的分布相对稳定,盒图的均值可以作为最小方差估计值,比之线性估计方法,明显更接近最小方差理论值。
表1列出了基于AR模型的线性估计方法和本文方法最小方差估计值的对比,其中本文方法估计值是t分别为50、100、150时对应的3列盒图均值的平均值。从表1中可以明显看出,针对非线性串级控制系统,线性估计方法估计值的偏离度超过了150%,而本文方法估计值的偏离度均在合理范围之内。
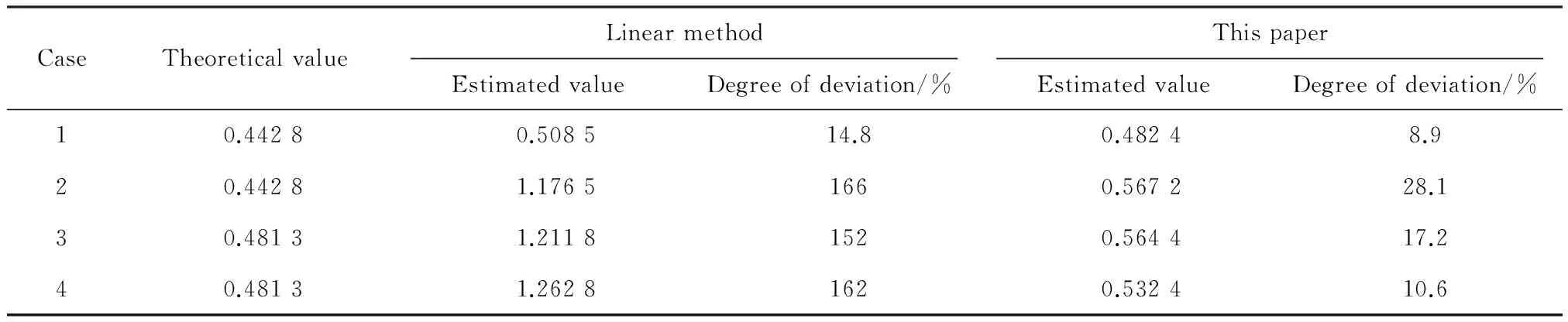
表1 两种方法最小方差估计值对比
5 结 论
本文针对一类过程非线性串级控制系统,证明其输出最小方差同输入扰动项的关系,提出了基于方差分解的方法估计此类系统的最小方差性能下限,比之传统线性方法有更好的估计效果。同时本文针对的是带有2个扰动输入的系统,可以认为是一个多输入单输出的系统,这也为研究真正的多输入非线性系统性能估计提供了参考。应该注意,蒙特卡罗模拟实验需要大量的计算,对系统性能的实时性估计造成了一定的难度,有待进一步改进。
[1]HARRIS T J,SEPPALA C T,DESBOROUGH L D.A review of performance monitoring and assessment techniques for univariate and multivariate control systems[J].Journal of Process Control,1999,9(1):1-17.
[2]HARRIS T J.Assessment of control loop performance[J].Canadian Journal of Chemical Engineering,1989,67(5):856-861.
[3]JELALI M.An overview of control performance assessment technology and industrial applications[J].Control Engineering Practice,2006,14(5):441-466.
[4]KO B,EDGAR T F.Performance assessment of cascade control loops[J].AIChE Journal,2000,46(2):281-291.
[5]CHEN J,YEA Y,KONG C K.Fault detection of the cascade control system based on output performance[C]//IEEE Conference on Industrial Electronics and Applications.USA:IEEE,2006:1-6.
[6]王海波,杨马英.基于广义最小方差的串级控制系统性能评价[C]//第29届中国控制会议.北京:[s.n.].2010:376-3881.
[7]YU Wei,WILSON D,YOUNG B.Control performance assessment for block-oriented nonlinear systems[C]//IEEE International Conference on Control & Automation.USA:IEEE,2010:1151-1156.
[8]YU Wei,WILSON D I,YOUNG B.A comparison of nonlinear control performance assessment techniques for nonlinear processes[J].Canadian Journal of Chemical Engineering,2012,90(6):1442-1449.
[9]HARRIS T J,YU W.Controller assessment for a class of non-linear systems[J].Journal of Process Control,2007,17(7):607-619.
[10]YU Wei,WILSON D I,YOUNG B R.Control performance assessment for nonlinear systems[J].Journal of Process Control,2010,20(10):1235-1242.
[11]LEONTARITIS I J,BILLINGS S A.Input-output parametric models for non-linear systems:Part II.Stochastic non-linear systems[J].International Journal of Control,1985,41(2):329-344.
[12]ARCHER G E B,SALTELLI A,SOBOL I M.Sensitivity measures,ANOVA-like techniques and the use of bootstrap[J].Journal of Statistical Computation and Simulation,1997,58(2):99-120.
[13]CHEN Biling,BILLINGS S A,LUO Weili.Orthogonal least squares methods and their application to non-linear system identification[J].International Journal of Control,1989,50(5):1873-1896.
[14]ARCHER G E B,SALTELLI A,SOBOL I M.Sensitivity measures,ANOVA-like techniques and the use of bootstrap[J].Journal of Statistical Computation & Simulation,1997,58(2):99-120.
Control Performance Assessment Based on Variance Decomposition for a Class of Nonlinear Cascade Systems
WANG Ya-bin,SUN Jing-gao
(Key Laboratory of Advanced Control and Optimization for Chemical Processes,Ministry of Education,School of Information Science and Engineering,East China University of Science and Technology,Shanghai 200237,China)
The minimum variance lower bound (MVLB) represents the best control performance in an output variance sense.For a class of nonlinear cascade systems,the traditional linear assessment method will cause an overlarge estimate on the system performance.In this work,the existence of MVLB of the block-oriented nonlinear cascade system is firstly proved,which just depends on the disturbances of several primary loop and secondary loop.And then,the system input and output data is utilized to reconstruct polynomial models for approximating describing the nonlinear cascade systems.By means of variance decomposition,Monte Carlo strategy is used to calculate the contribution of these disturbances items and determine MVLB estimate.Finally,it is shown from the comparison with linear assessment method that the proposed method is efficient and accurate for this class of nonlinear cascade systems.
performance assessment; nonlinear; block-oriented model; cascade systems; variance decomposition
1006-3080(2016)04-0537-08
10.14135/j.cnki.1006-3080.2016.04.015
2015-11-13
王雅斌(1992-),男,河南周口人,硕士生,主要研究方向为控制系统性能评估。E-mail:w_yabin@126.com
通信联系人:孙京诰,E-mail:sunjinggao@126.com
TP273
A
