基于Skinner-Ransac的移动机器人单目视觉SLAM
2016-09-18阮晓钢王丹阳魏若岩李笑漪
阮晓钢,王丹阳,魏若岩,2,李笑漪
(1.北京工业大学电子信息与控制工程学院,北京 100124;2.河北经贸大学信息技术学院,石家庄 050000)
基于Skinner-Ransac的移动机器人单目视觉SLAM
阮晓钢1,王丹阳1,魏若岩1,2,李笑漪1
(1.北京工业大学电子信息与控制工程学院,北京 100124;2.河北经贸大学信息技术学院,石家庄 050000)
针对移动机器人单目视觉同时定位与地图创建(simultaneous location and mapping,SLAM)数据关联问题,提出一种Ransac抽样算法.该算法(Skinner-Ransac)基于Skinner操作条件反射原理,结合扩展卡尔曼滤波(extended Kalman filter,EKF)运动模型获得的先验信息,对图像匹配点抽样集合中的每个匹配点对赋予权值,并根据判断函数对其权值进行更新.最后,针对数据关联的效率要求提出新的迭代终止条件,以公开图像数据集作为图像采集样本.实验结果表明:Skinner-Ransac算法高效可靠,SLAM的位姿估计结果可以达到移动机器人自主导航的需求.关键词:Skinner-Ransac算法;移动机器人;单目视觉同时定位与地图创建;数据关联
同时定位与地图创建(simultaneous location and mapping,SLAM)问题是指移动机器人利用自身配置的传感器在未知环境中实现感知,自主进行定位并建立增量式地图的过程[1].数据关联[2]是指SLAM根据匹配点对状态(位姿和地图)进行EKF更新时必须明确每个特征匹配点对应哪个路标.在单目视觉SLAM系统中,如果解决了SLAM系统中特征匹配点的数据关联问题,即能够获得摄像机拍摄时序图像上面提取的图像特征之间的精确对应关系,之后只需要估计出对应该时刻相机的位姿以及地图上相对应地标的3D空间坐标[3-4],即可实现移动机器人SLAM.
Davison等[5]实现了采用InverseDepth方法的单目视觉SLAM,但由于实验设计中关联算法的不稳定性导致结果误差较大,由此可以看出,数据关联算法的欠缺或者偶然失效会导致EKF滤波发散,从而造成SLAM的较大误差甚至失败.
近年来用于解决SLAM中的数据关联问题的通常做法是采用1-point Ransac算法[6-7],但由于1个匹配点只能够提供2个约束,因此该算法存在滤波发散的风险,而且由于迭代过程中多次对滤波器进行更新,因此会损耗一定的运算时间.针对1-point Ransac算法的不足,提出基于Skinner操作条件反射原理的抽样算法(Skinner-Ransac),以公共图像数据集作为图像采集样本,对算法进行实验仿真对比,结果表明:Skinner-Ransac算法能够根据当前匹配结果主动地进行权值调整,进一步提高匹配点正确抽样概率,从而提高位姿估计可靠性和精度,对迭代终止条件进行重新设计,使得算法效率得到提升.
1 SLAM系统介绍
单目视觉SLAM系统主要包括坐标关系模型、系统状态模型、运动模型和观测模型.
1.1坐标模型
在单目视觉SLAM系统中同时存在3种坐标系,即世界坐标系、相机坐标系和图像坐标系.3者之间的关系如图1所示.
特征点P1在世界坐标系中表示为[X,Y,Z]T,在相机坐标系中表示为[hx,hy,hz]T,RCW为3×3的表示相机坐标系与世界坐标系的转换矩阵,相机平移向量用te表示,则相机坐标系与世界坐标系之间的关系为
1.2状态模型
相机是单目视觉SLAM系统的主传感器,则用合理的方式表示其状态是移动机器人SLAM的关键所在,常用的相机坐标系下系统状态向量及其协方差表示为
式中:rCk为位置坐标方向;qCk为四元数坐标变换矩阵;vCk为线速度;ωCk为角速度;ECk为状态之间的协方差矩阵;ECky为特征和状态间的协方差矩阵;Ey为特征之间的协方差矩阵.
1.3运动模型
假设在序列图像采样间隔Δt内,相机的线速度和角速度都保持近似不变,那么可将运动模型视为理想的平滑运动模型,其矩阵表示为
式中:s为线加速度;αk为角加速度.
1.4观测模型
观测模型是指用观测值描述移动机器人与环境特征之间的相对关系,而且一般用相对距离和相对角度来表示这种相对关系.分析得到系统观测模型
式中ρ(θi,ψi)为相机到特征之间的单位向量.
2 Skinner-Ransac算法原理
2.1Skinner-Ransac抽样算法模型构建
Skinner-Ransac抽样算法模型可以表示为一个八元组,
M为搜索匹配点集,可以表示为
式中:n为匹配对的数目;mi为第i个匹配对. G为权值集合,可以表示为
式中初始权值wi=1,i=1,2,…,n.
P为特征匹配点集M的抽样概率集合,可以表示为
蚕豆营养价值丰富,是高蛋白低脂肪的植物蛋白资源,具有一定的药用和保健作用。蚕豆适应冷凉气候和多种土地条件,具有生物固氮之王的美誉,作为间套作和养地作物对种植业结构调整有重要的作用,是我国北方主要的早春作物,南方主要的冬季作物。我国蚕豆栽培主要分为秋播和春播,其中秋播蚕豆的种植面积和产量占80%左右。本研究通过在青海省循化县4个春播蚕豆品种比较试验,进行蚕豆品种田间生长情况及产量测定,进一步验证蚕豆增产效益,评价筛选出适宜在循化县种植的优良品种。
T为判断每个匹配点在当前匹配抽样点集的判别函数,当判断该点为错误匹配点时,赋予其极对距离一个常数c,通常由经验确定常数c的取值.
式中:F为估计矩阵;u′和u为匹配点;l1和l2分别为极线l划分的2个部分,l′1和l′2分别为极线l′划分的2个部分.
式中:round表示取舍函数;Q表示惩罚函数;R表示最大奖励程度,并且要求R>Q.
Iinliers的初始值取0,表示最多正确匹配点数量.
Zinliers为具有最小观测残差的匹配点集,初始取值Zinliers=Ø.
N为设定的最大迭代次数.
同时,针对本文提出的算法设计新的迭代终止条件,K表示当前迭代次数,则算法终止条件为:根据当前的Iinliers和给定的置信概率判断K是否大于或等于设定的最小抽样次数,即
式中:m为抽样点集中的正确匹配点对数目;p为置信概率.
2.2Skinner-Ransac抽样算法实现过程
Skinner-Ransac抽样算法的实现过程可以比较直观清晰地用流程图来描述,如图2所示.
3 基于Skinner-Ransac的单目视觉SLAM的流程
SLAM流程应该包括运动预测、主动搜索、数据关联、数据更新等步骤,基于Skinner-Ransac的单目视觉SLAM的具体流程如图3所示.
4 试验分析
为验证本文基于Skinner-Ransac的单目视觉SLAM方法的综合性能,采用公开图像数据集进行试验,并与1-point Ransac SLAM方法进行比较分析,公共数据集中共有2170张像素为320×240的pgm格式灰度图片,本文在试验中选取第100张到400张共300张图片进行试验,实验过程中采用相同的EKF参数设置,实验的结果如下.
根据图4,对不同算法每帧运行时间进行比较,可以看出本文提出的Skinner-Ransac方法的实时运算性能要高于1-point Ransac SLAM方法,另外,通过对实际实验过程的观察发现,运行时间的高峰和低谷,反映了系统在不同运行时间对匹配特征点的需求的大小.
对运行时间取均值,如表1所示.

表1 算法每帧运行时间对比Table 1 Algorithm running time in each frame
对算法的估计性能进行实验分析,摄像头的真实6维位姿数据由IMU测量得到,将本文方法的摄像头位姿估计结果和1-point Ransac SLAM方法的位姿结果与IMU测到的实际位姿结果进行对比,图5为三维位置估计结果统计图,图6为三维位姿估计结果统计图.可以看出,采用不同数据关联方法的SLAM得到的位置,姿势估计值曲线的变化趋势是一致的,但是本文方法得到的估计值曲线与IMU测得的位姿更加近似.
统计2种算法的估计结果以IMU测量值为对比结果的均方差值,如表2所示.可以发现,基于本文方法的SLAM的均方差更小,精度更高.
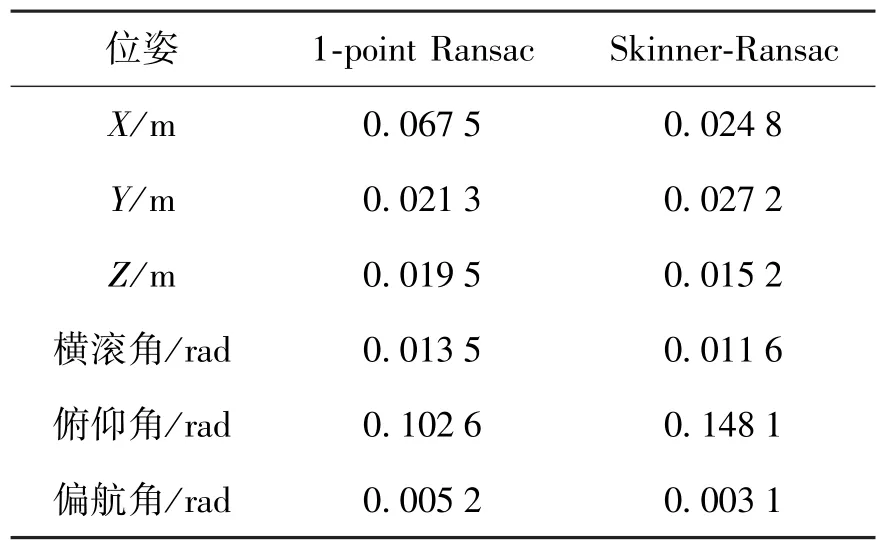
表2 位姿相对估计Table 2 Pose estimation
5 结论
1)将Skinner概率自动机与Ransac算法结合,提出Skinner-Ransac算法用于移动机器人单目视觉SLAM,利用认知心理学对序列图像匹配点抽样正确率进行主动性调整,提高匹配点抽样正确率,有利于进一步解决SLAM系统中数据关联问题.
2)针对图像数据集的仿真实验表明,本文提出的Skinner-Ransac算法在迭代运行时间和算法精度上较之1-point Ransac算法有一定的优势.
[1]DISSANAYAKE M W M G,NEWMAN P,CLERK S,et al.A solution to the simultaneous localization and map building(SLAM)problem[J].IEEE Transactions on Robotics and Automation,2001,17(3):229-241.
[2]MILFORD M J,WYETH G F.Single camera vision-only SLAMonasuburbanroadnetwork[C]∥IEEE International Conference on Robotics and Automation. Pasadena:IEEE,2008:3684-3689.
[3]SCARAMUZZA D,SIEGWART R.Appearance-guided monocularomnidirectionalvisualodometryforoutdoor ground vehicles[J].IEEE Transactions on Robotics,2008,24(5):1015-1026.
[4]DAVISON A J.Real-time simultaneous localisation and mapping withasinglecamera[C]∥Proceedingsof International Conference on Computer Vision.Piscataway: IEEE,2003:1403-1410.
[5]CIVERA J,DAVISON A J,MONTIEL J.Inverse depth parametrizationformonocularSLAM[J].IEEE Transactions on Robotics,2008,24(5):932-945.
[6]CIVERA J,DAVISON A J,MAGALLON J A,et al. Drift-free real-time sequential mosaicing[J].International Journal of Computer Vision,2009,81(2):128-137.
[7]CIVERA J,GRASA O G,DAVISON A J.1-point RANSAC for extended Kalman filtering:application to real-time structure from motion and visual odometry[J]. Journal of Field Robotics,2010,27(5):609-631.
[8]SKINNER B F.The behavior of organisms[M].New York:Appleton Century Crofts,1938:110-150.
(责任编辑 杨开英)
Mobile Robots Mono-SLAM Based on Skinner-Ransac
RUAN Xiaogang1,WANG Danyang1,WEI Ruoyan1,2,LI Xiaoyi1
(1.College of Electronic Information and Control Engineering,Beijing University of Technology,Beijing 100124,China;2.College of Information Technology,Hebei University of Economics and Business,Shijiazhuang 050000,China)
A method of sample consenus algorithm based on Skinner probabilistic automata(Skinner-Ransac)was proposed to solve the data association problem in monocular vision simultaneous location and mapping(SLAM)for mobile robots.Combined with the priori information of extended kalman filter (EKF)motion model,to assign weight for each sample in the set of image matching points samples,and update the weight for each sample based on the current sample results,a new iteration terminal condition was put forward for the lack of the priori knowledge.A set of open image data were taken as test samples. Results show that Skinner-Ransac algorithm is efficient and reliable,and SLAM's pose estimation accuracy can be achieved for the need of mobile robot autonomous navigation.
Skinner-Ransac algorithm;mobile robot;mono-SLAM;data association
TP 242.6
A
0254-0037(2016)09-1281-05
10.11936/bjutxb2015070097
2015-07-21
国家“973”计划资助项目(2012CB720000);国家自然科学基金资助项目(61375086);北京市教育委员会科技计划重点项目(KZ201210005001)
阮晓钢(1958—),男,教授,主要从事人工智能与机器人技术方面的研究,E-mail:adrxg@bjut.edu.cn