基于传声器阵列的机器人声源定位系统
2016-09-16宫玉琳文大化
宫玉琳,文大化
(1.长春理工大学 电子信息工程学院,长春 130022;2.中国科学院长春光学精密机械与物理研究所,长春 130033)
基于传声器阵列的机器人声源定位系统
宫玉琳1,文大化2
(1.长春理工大学电子信息工程学院,长春130022;2.中国科学院长春光学精密机械与物理研究所,长春130033)
随着计算机技术和信号处理技术的发展,各种具有特殊功能的机器人应用到人们的生产生活中。听觉系统可以弥补机器人视觉系统存在的不足,使机器人在黑暗或有障碍物遮挡的环境中,利用声音信息感知环境中存在的目标,并对其定位,辅助机器人工作,尤其在灾难现场搜救、军事等领域,声源定位系统具有独特的优势。针对机器人声源定位系统进行研究,设计了基于传声器阵列的机器人声源定位系统,采用平面四元传声阵列,利用广义互相关算法,实现对声源的定位,具有较高的实用价值。
传声器阵列;广义互相关;声源定位
声源定位技术自20世纪90年代以来,获得了较快的发展,传声器阵列技术逐步取代了单传声器探测的不足,具有很好的抑制噪声能力,并可通过相应算法确定声源的空间具体坐标,定位准确。本文在广义互相关算法的基础上,设计了基于传声器阵列的机器人定位系统,实现了可以用于机器人的声源定位系统,实验结果表明系统定位精度较高,具有较高的实用价值和广阔的应用前景。
1 传声器阵列结构模型
常用的传声器阵列结构如图1所示,分为线阵列、面阵列、立方体阵列和球面阵列等。传声器数量越多,系统获得的声源信息就越多,定位精度越高,但对系统的要求也越高,实现的算法越复杂,这就对系统的性能提出了较高的要求。反之,传声器数量越少,系统的实现算法越简单,但定位结果的精度越低。因此,实际应用中,需要综合考虑定位精度要求、算法复杂程度和系统性能等多方面因素。
本文综合上述因素,建立了基于四元平面传声器阵列的声源定位系统,如图2所示。由图可见,传声器阵列由四个传声器S1、S2、S3、S4构成,各个传声器间距为L,阵列的中心设为坐标原点。以原点O建立如图所示的直角坐标系,当声源位置在S处时,便可根据S与O的距离R,水平角度φ以及俯仰角度θ,确定S的位置。
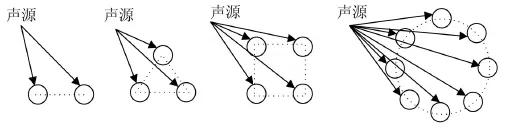
图1 传声器阵列结构
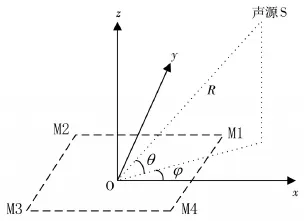
图2 四元平面传声器阵列结构

化简式(1)可得:

将式(2)代入式(1)可得:

式中,d12=τ12c,d13=τ13c,d14=τ14c。其中,c为声速,τ12,τ13,τ14为传声器M1分别与M2、M3、M4的延时。因此,在声源估计中,只需要计算出时延τ12,τ13,τ14,即可求得声源S的坐标x,y,z及声源与传声器M1的距离R1,进一步即可求得方位角φ和俯仰角θ,如式(4)和式(5)所示。
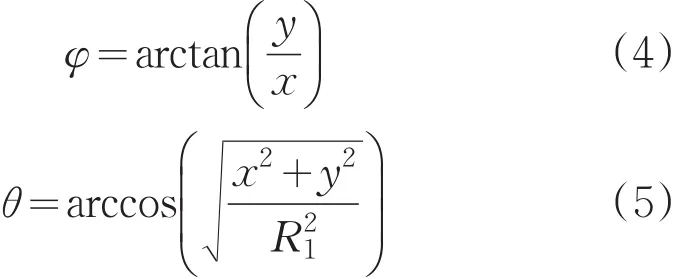
考虑到上述计算量较大,因此实际应用中可采用近似方法计算方位角φ和俯仰角如式(6)和式(7)所示。

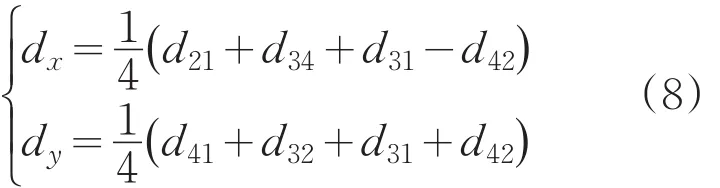
式中:
2 广义互相关时延估计算法
时延估计算法就是利用信号处理理论,估计计算声音到达各个传声器的时间差,进一步计算声源位置参数。
当声源与传声器阵列距离较远时,可将声波近似作为平面波来分析,如图3所示,只要估计出时延τ,即可根据时延计算出方位角,并进一步计算得到声源位置。
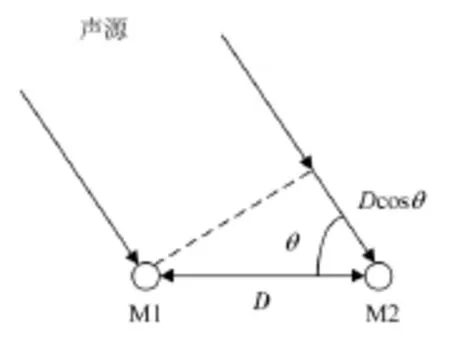
图3 时延估计原理
因此,时延估计的准确程度就决定了声源定位的精确度,本文采用广义互相关时延估计(General Cross Correlation,GCC)算法,对时延进行估计计算。
GCC算法的本质就是在频域对声音信号进行加权,增强信号的相关部分并抑制信号的噪声,进而使相关函数在时延的峰值更为突出。GCC算法能够很好的抑制噪声干扰并尽量免受声源信号自身特性的影响。
由互相关函数与互功率谱可得:


式中,ψ12(ω)为频域加权函数,广义互相关函数的峰值即对应时延估计值。
常用的加权函数有ROTH加权、SCOT加权、PHAT加权、ML/HT加权。ROTH加权、SCOT加权和PHAT加权对抑制信号的周期分量具有很好的效果,ML/HT加权是统计最优滤波器,但是需要统计特性的先验知识。本文采用ROTH加权方法对时延进行估计。
为了验证算法的可行性,首先进行了Matlab仿真实验,实验中模拟两路声音信号x1和x2,并加入随机噪声,采样频率设置为1000,延迟点数为2,理论时延为0.004。采用GCC算法进行时延估计,仿真结果如图4所示,仿真结果验证了GCC算法的可行性。
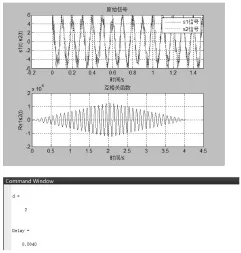
图4 GCC算法时延估计
3 声源定位系统实现
3.1硬件电路设计
本文所设计的声源定位系统,采用STM32F 103C8T6芯片作为处理器。STM32系列处理基于ARMCortex-M3内核,具有高性能、低成本、低功耗的特点。硬件系统结构如图5所示。
系统硬件电路由传声器、信号调理电路、A/D转换电路、STM32处理器和液晶显示电路组成。传声器阵列接收到的声音信号首先经过信号调理电路,进行滤波和放大,然后经过A/D转换电路转换为数字信号,接着STM32通过GCC算法进行时延估计,进一步得出最终结果,将声源坐标通过显示器显示出来。
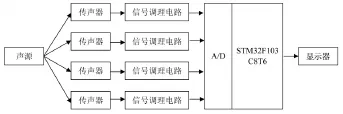
图5 系统硬件结构框图
传声器选用驻极体传声器,驻极体传声器由声电转换电路和阻抗转换电路两部分组成,具有较好的电声性能,灵敏度高、价格低。
信号调理电路由两级放大电路组成,如图6所示。运算放大器选用LM358芯片,该芯片具有电压增益高、电压范围宽、失调电压低等优点。电路中第一级放大倍数为,第二级放大倍数为

电路中,R2=1kΩ,R4=20kΩ,R5=1kΩ,R7= 50kΩ,因此可得计算可得信号调理电路的放大倍数为0~1000倍。,可得输入信号的总放大倍数为:
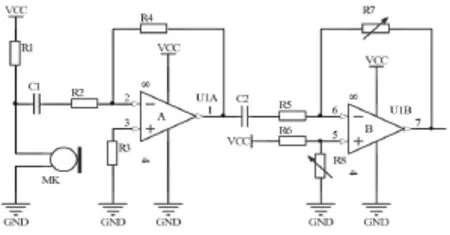
图6 信号调理电路
STM32F103C8T6微控制器系统电路由电源电路、晶振电路、复位电路等构成,如图7所示。
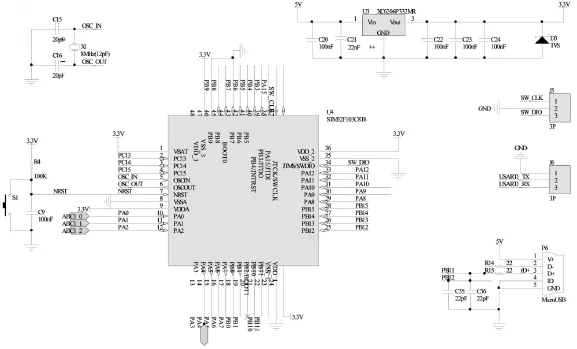
图7 STM32F103C8T6微控制器电路
3.2软件设计
GCC时延估计算法实现流程如图8所示,在计算得到时延以后,即可根据式(6)和式(7)计算得到声源的位置坐标,实现对声源的定位。
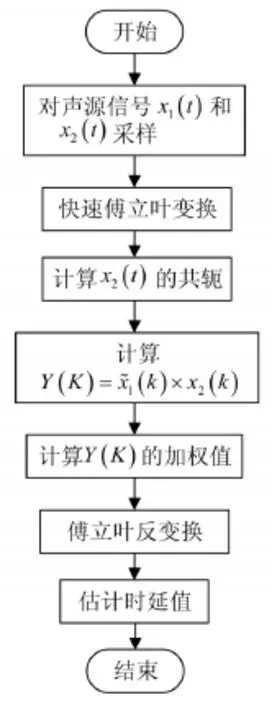
图8 GCC实验估计算法流程图
4 实验分析
实验硬件系统如图9所示,图(a)为信号调理电路,图(b)为STM32F103C8T6最小系统。
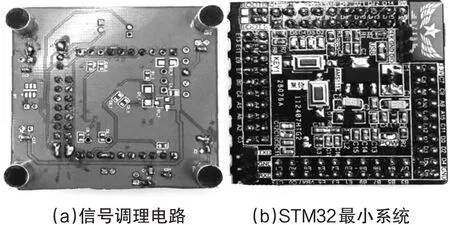
图9 实验硬件系统
表1所示的是利用语音发生模块做声源,实现的声源定位实验。实验中,分别将语音模块放置在30°、60°、90°、120°和150°位置,距离为40~60cm。
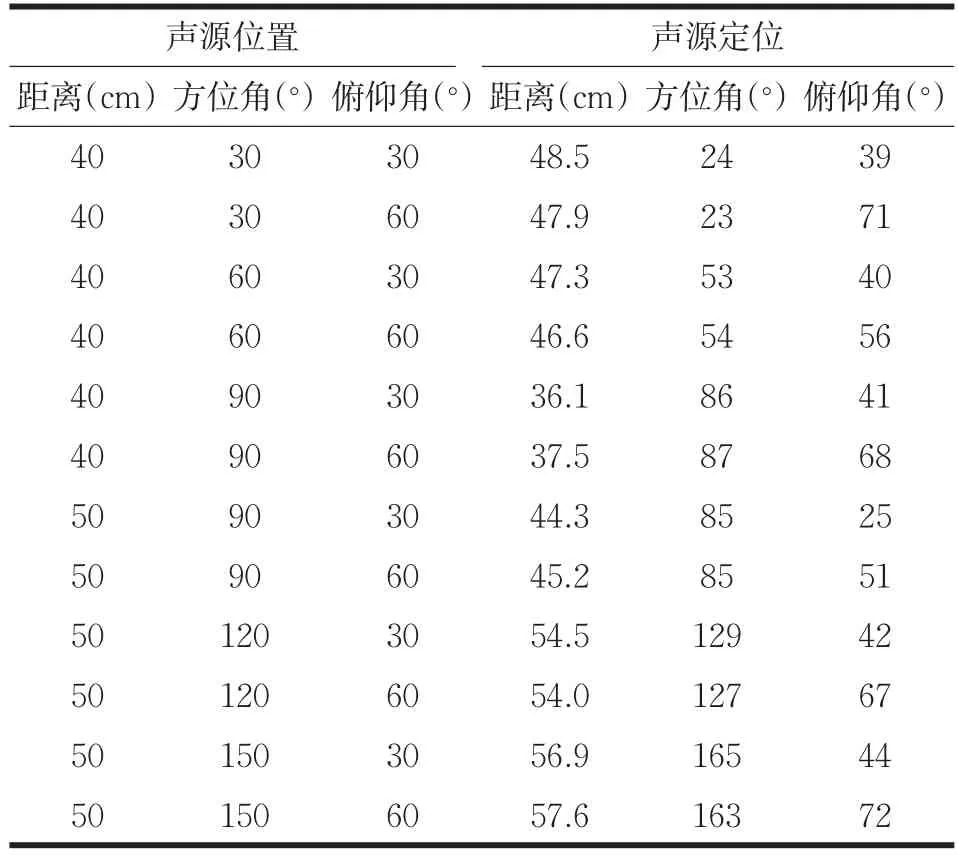
表1 实验结果
由实验结果可见,声源位置在90°时误差较小,声源角度增大或者减小都会增大定位误差。同时,距离越近,定位误差越小。综合分析实验结果,系统硬件精度和算法是系统误差的主要来源,此外,不同的环境中,声速也不同,如能准确测试出实验环境中的声速,定位精度还可进一步提高。
5 结论
本文设计了基于传声器阵列的机器人声源定位系统,完成了声源定位系统的软硬件设计,并对系统进行了实验分析,实验结果表明,系统定位误差较小,可以实现机器人对声源位置的定位。为了提高定位精度,未来需要在定位算法上做进一步的改进。
[1]Wax M,Lailath T.Optimum location of multiple sources by passive arrays[J].IEEE Transactions on Acoustics,SpeechandSignalProcessing,1983,31 (5):1210-1217.
[2]王涛.基于ARM的声源定位技术研究[D].沈阳:沈阳航空航天大学,2013.
[3]Wang Yabin,Jia Jingjing,Liu Mingjie.Research on acoustic localization algorithm based on dual fourelementarrays[J].JournalofBeijingInstituteof Technology.2009,18(1):55-58.
[4]吕晓玲.基于听觉信息的机器人声源定位技术研究[D].天津:河北工业大学,2010.
[5]崔玮玮,曹志刚,魏建强.声源定位中的时延估计技术[J].数据采集与处理,2007,22(1):91-98.
[6]柯昆.声源定位技术研究[D].西安:西安电子科技大学,2010.
The Robot Sound Source Locating System Based on Microphone Array
GONG Yulin1,WEN Dahua2
(1.School of Electronic and Information Engineering,Changchun University of Science and Technology,Changchun 130022;2.Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Sciences,Changchun 130033)
With the development of computer technology and signal processing technology,all kinds of robots with special functions are applied to the production and life of people.The auditory system can make up for the deficiency existing in the robot vision system,the robot in the dark or obstructions of environment,using sound information perception environment in the presence of the target,and the positioning,robot assisted work,especially in the field of disaster rescue,military and other fields,sound source localization system has a unique advantage.The sound source localization robot system for research,design based on microphone array sound source localization robot system by four element planar microphone array,using the generalized cross correlation algorithm,to achieve the sound source localization.Experimental results show that the system has high positioning accuracy,with a high practical value.
microphone array;generalized cross correlation;sound source localization
TP301
A
1672-9870(2016)03-0041-04
2016-02-18
宫玉琳(1983-),男,博士,讲师,E-mail:garrygong1983@126.com
