基于VEGA PRIME激光制导导弹三维视景仿真设计
2016-09-16韩文波周易欣刘禹佳迟名辰
韩文波,周易欣,刘禹佳,迟名辰
(长春理工大学 光电工程学院,长春 130022)
基于VEGA PRIME激光制导导弹三维视景仿真设计
韩文波,周易欣,刘禹佳,迟名辰
(长春理工大学光电工程学院,长春130022)
三维视景仿真依据仿真目的,可实时再现导弹攻击目标的全过程,为激光制导武器半实物仿真的飞行仿真、航迹规划等提供了直观的分析手段。通过Vega prime和Creator建立了导弹攻击目标的三维视景仿真系统中所需的三维实体模型、地形模型、天空、海面、雪地和碰撞等特殊效果并对其进行优化处理。依据导弹弹道解算模型实时解算导弹弹道参数,通过人机交互界面实时显示导弹飞行的位置和姿态,实现了导弹攻击目标的可视化仿真。
三维视景软件;弹道解算;Creator;Vega prime
视景仿真系统是用虚拟现实技术使用户产生身临其境感觉的交互式仿真系统。激光制导导弹三维实景仿真采用计算机图像技术,进行真实场景再现或建立实体仿真的三维模型,解决了激光制导武器实物实验难以实现的难题,可以达到非常逼真的仿真效果。[1]本文根据激光制导导弹半实物仿真的要求,建立导弹的数学模型,选择合适的导引方法对弹道参数进行实时解算;利用建模软件建立场景所需的模型;视景仿真计算机通过以太网在弹道仿真计算机的控制下,接收弹道解算计算机解算的驱动数据,在Vega prime平台上实现弹道识别、跟踪及命中目标全过程的仿真。
1 三维视景仿真的整体结构
针对实时作战过程直观化以及仿真结果图形化的要求,建立了一套具有良好视觉效果和交互能力的三维视景仿真软件。首先利用比例导引法进行弹道解算,然后利用Creator建模软件建立飞机、导弹、坦克等三维实体模型和地形模型。最后在VC平台下利用仿真应用程序的编程接口Vega Prime API函数来驱动视景仿真程序,调用API函数来生成相应的ACF文件,对虚拟仿真场景进行交互控制,实现了实时驱动和显示导弹攻击目标的全过程。三维视景仿真软件的整体构建过程如图1所示。

图1 三维视景仿真软件的整体构建过程
2 视景仿真弹道解算方法与仿真
2.1弹道模型
经典的自寻导弹制导方法有追踪法、平行接近法、比例导引法。本论文采用比例导引法解算弹道。比例导引法是基于导弹速度矢量的转动角速度和目标视线的转动角速度成比例的原理建立的一种导引方法。
将导引表达式分成水平方向和竖直方向两个表达式:

其中k为导引系数。
建立模型过程如下:
(1)假设导弹的起始位置为(0,0,0),目标相对于导弹的位置为(xt0,yt0,zt0)。
(2)在t1时刻开始对导弹进行导引,此时导弹的位置为(xm1,ym1,zm1),目标相对于导弹的位置为(xt1,yt1,zt1),此时导弹的方向用σm1和αm1来表示:
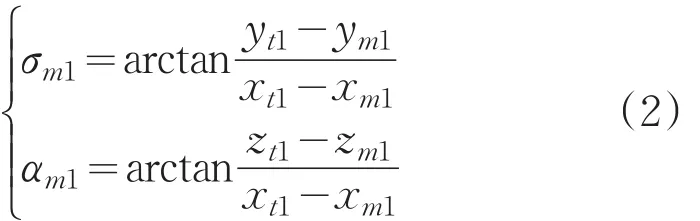
此时假设导弹的运动方向与弹目实际运动方向一致,则有:

式中,sp表示水平方向,sz表示竖直方向。
(3)经过一段时间来到t2时刻,假定导弹的运动方向始终与弹目实际运动方向一致,此时导弹位置的表达式为:
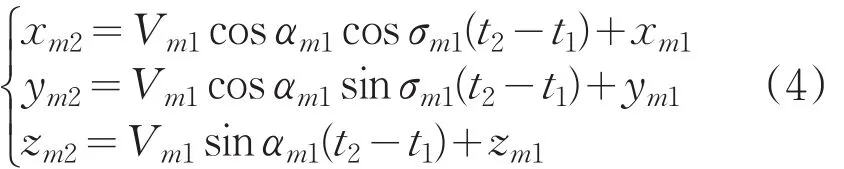
此时

则导弹的转动角速度表达式为:

下一个时间段的计算方法同上,最后得到导弹与目标的相对距离:

在t时刻,(xm,ym,zm)表示导弹的位置,目标相对于导弹的位置为(xt,yt,zt);当r小于阈值r0时,就认为导弹已经击中目标。
2.2弹道仿真
本系统采用Matlab仿真软件,对导弹与目标之间的相对距离进行求解得到弹道的轨迹图。如图2所示是弹道仿真的过程,假设导弹攻击速度大小V=780m/s,目标前进速度大小VT=390m/s,目标的运动轨迹为直线,假设导弹开始受到导引控制时的坐标位置为原点,目标在空间的坐标位置为(24,8,4),导弹速度矢量与目标瞄准线之间的夹角初值目标速度矢量与目标瞄准线之间的夹角初值,一般选取弹道解算的仿真步长为25ms,比例导引系数取k=3;通过Matlab仿真软件对导弹—目标相对运动微分方程进行求解得到弹道的轨迹图,如图3所示。

图2 弹道仿真流程图

图3 弹道解算仿真轨迹
3 导弹攻击目标三维视景仿真设计
3.1三维视景仿真的流程
在三维视景仿真系统中,首先需要对视景和网络进行初始化;弹道仿真计算机与视景仿真计算机通过以太网进行数据通讯,用来控制三维场景中模型的实时运动,将Creator中的模型进行仿真和实现。再通过比例导引法对导弹轨迹进行解算,然后在视景场景中利用Vega Prime Isector模块进行相交测试,检测导弹是否击中目标,击中目标后就会产生爆炸的效果,会生成火焰、碎片等特效,最终完成一次仿真过程。三维视景仿真系统的流程图如图4所示。

图4 三维视景仿真的流程图
3.2三维实体模型建造
三维实体模型建立有很多种方法,本文采用截面法制作三维模型,为视景仿真场景提供了驱动对象[2]。下面以坦克为例介绍此方法,首先在背景图案上建立几个重要的多边形截面,然后使用调整工具将截面放置在图像相应的位置上,接着使用放样工具将他们连在一起,删除横截面和其他不必要的面,减少建模所需的多边形数量,最后利用镜面工具制作另一半坦克模型。
经过初步的建模,模型不够真实,还需要在模型上应用纹理。应用纹理是将二维图片投影到三维仿真模型的各个表面上。在Creator中要完成纹理图案在模型表面的映射,首先要打开纹理面板,载入单个或者多个纹理图案,使用纹理工具箱里面相应的映射方法进行投影。图5、6、7分别表示为应用纹理后的飞机模型、坦克模型、导弹模型。

图5 飞机模型

图6 坦克模型

图7 导弹模型
3.3地形模型的仿真
地形模型的建立可以模拟真实的作战场景,使场景中的模型对象运动起来更加形象逼真,增添了场景的视觉效果和渲染力。

图8 地形仿真流程图
图8为地形仿真的流程:首先在creator建立的地形模型中添加纹理和文化要素,使得地形显得更加真实;生成好的地形模型以flt的格式存储;接着通过调用Openflight的编程接口函数对地形进行设置,生成配置信息[3];在Vega Prime中将flt格式的地形模型转换成VSB格式的中间过渡文件,它可以将模型配置信息和纹理都转换成二进制文件,方便在场景中进行渲染,而且它的加载速度远远高于通过Lynx图形配置工具进行加载的速度;最后基于Visual Studio2005的平台调用仿真应用程序的编程接口Vega Prime API函数来驱动视景仿真程序,对虚拟仿真场景进行交互控制。图9为平原地形的仿真效果。

图9 平原地形仿真效果图
3.4特殊效果渲染
考虑到真实的仿真作战环境,应该在虚拟仿真场景中添加一些可以提高渲染力的特殊效果,例如导弹行进过程中的尾焰、导弹击中目标后的爆炸效果、被击中的目标碎片效果等等。采用Creator建模的方法是很难得到理想的显示效果,在Vega Prime特殊效果模块中提供了一种粒子系统[4],可以通过配置粒子相应的属性实现对特殊效果的仿真。
在Vega Prime中,特殊效果的渲染首先需要通过Isector模块和Volume模块来确定导弹是否成功击中目标;本文选择BUMP的方法来检测导弹和目标是否发生碰撞。当BUMP的六条线段中,有一条或者一条以上的线段与目标相交时,则碰撞就发生了,碰撞发生的同时就要触发特殊效果的显示。在Vega Prime中特殊效果的添加都是通过“Special Effect”模块完成特殊效果的配置,用户通过设置Lynx界面下此模块相应的效果配置属性来完成所需特殊效果的添加;把设置好的特殊效果信息存储在一个ACF文件中,利用仿真应用程序的编程接口Vega Prime API函数来驱动视景仿真程序,对虚拟仿真场景进行交互控制[5]。
3.5主界面显示
图形显示窗口是通过Vega Prime窗口类来配置的;Vega Prime窗口类中包含通道类、场景类和实体模型类。通道类主要通过vpChannelScene()函数完成多视角的观察和切换,这里提供了四个视角:装载导弹的载体视角,导弹视角、和对于目标两个不同的视角;场景类一般都是通过vpscene()函数实现场景的渲染[6],这里提供了四种场景可供选择,包括平原地面、沙漠、雪地和海洋;然后采用vpObjectScene()函数将观察者和场景相互关联[7];实体模型类主要用来定义三维仿真模型的属性,这里提供了导弹、舰船和坦克三种实体模型。图10为三维视景软件的主界面。

图10 导弹攻击目标的显示主界面
3.6三维视景仿真的实现
首先通过结构函数对视景进行初始化设置(窗口、通道、场景中的实体模型等等),然后对导弹模型动力学参数进行配置,最后在根据动力学模型参数和实际仿真的要求,设计了四个曲线来显示模型参数的变化情况,这样就可以在仿真过程中直观而方便地看到相应参数的变化曲线,如图11所示。

图11 动力学参数变化曲线
视景仿真计算机可通过以太网在弹道仿真计算机的控制下,接收弹道解算计算机解算的驱动数据,进行相应场景的实时视景仿真。图12为导弹攻击目标后的仿真效果图。

图12 仿真效果图
4 结论
本文对基于Vega Prime激光制导导弹三维视景仿真系统进行了研究,主要从弹道解算、三维建模、Vega Prime的开发环境下对数据和场景进行渲染的三个角度进行了分析,该系统在模型构造、多视角观察、场景设计、特殊效果等都达到了预期的目标,系统界面设计清晰易懂,可利用价值高。在实验室条件下实现了弹道识别、跟踪及命中目标全过程的仿真。基于Vega Prime激光制导导弹三维视景仿真系统的建设在激光制导武器的研究、试验、作战仿真、训练和教学中有重要作用。
[1]王桂明.导弹飞行虚拟现实仿真系统的研究[D].哈尔滨:哈尔滨工程大学,2007.
[2]张斌.导弹作战系统视景仿真技术研究[D].西安:西安电子科技大学,2007.
[3]Liu Zhenbao,Wang Zhongsheng,Zhang Chao.Scheme of dynamic clouds generationfor 3D real time flight simulation[J].ComputerModelingandSimulation,2010(2):370-374.
[4]Zhang Yanyan,Cong Dacheng,Han Junwei.Realtime rendering of large-scale terrain in the flight simulation[J].IntegrationTechnology,2007(3):426-431.
[5]Zhou Yanyan,Zhang Dongyang,Ren Baoxiang.Credibility evaluation of missile flight simulation model [J].Intelligence Information Processing and Trusted Computing,2010(10):471-474.
Research on the Three Dimensional Visual Simulation System of Laser Guidance Missile Based on Vega Prime
HAN Wenbo,ZHOU Yixin,LIU Yujia,CHI Mingchen
(School of Optoelectronic Engineering,Changchun University of Science and Technology,Changchun 130022)
Three dimensional visual simulation is based on the purpose of the simulation,which can reproduce the whole process of the missile attacking target,and provide a visual analysis method for path planning and flight simulation of semi physical simulation of laser guided weapon.In this paper,the 3D visual simulation system of missile attacking target is established by Vega Prime and creator.The 3D solid model,terrain model,sky,sea surface,snow and collision are established and carried on the optimization.Based on the ballistic trajectory calculation model,the missile trajectory parameters are calculated in real time.The position and attitude of the missile is displayed in real time by the man-machine interactive interface.Visual simulation of missile attacking target is realized.
3D visual scene software;ballistic solution;Creator;Vega prime
TP391.9
A
1672-9870(2016)03-0014-05
2015-12-08
韩文波(1970-),女,副教授,E-mail:hanwenbo@cust.edu.cn
