大视场红外搜索系统的光机结构设计
2016-09-16彭家浩刘韬邓健
彭家浩,刘韬,邓健
(中国科学院长春光学精密机械与物理研究所,长春 130033)
大视场红外搜索系统的光机结构设计
彭家浩,刘韬,邓健
(中国科学院长春光学精密机械与物理研究所,长春130033)
设计了具有小型化、集成化的兼具大视场和高分辨率的红外搜索系统。首先阐述了系统的工作原理:采用扫描成像方法将9个凝视视场的图像拼接获得大视场高分辨图像;光学系统结构由偏移视场棱镜组、扫描镜和成像镜头三部分组成,光学设计的单个凝视视场范围为6.87°×5.50°,通过上述扫描方式拼接后获得6.87°×45.10°的大视场,对系统的成像质量进行了分析与评价,在20lp/mm时系统MTF接近衍射极限;重点介绍了扫描镜机构中传动装置以及图像采集时序设计,完成加工装调后系统重量52kg,扫描装置运转平稳,光机设计结果均达到设计要求。
大视场;高分辨;红外搜索;扫描成像;设计
随着红外成像技术的发展,近年来红外搜索系统越来越受到人们的重视。红外搜索与跟踪系统的任务是可靠探测、定位和连续跟踪在背景辐射和其他干扰下发射红外线的物体和目标,并且提供预警信号[1-2]。红外预警探测系统是基于目标红外特征,以被动方式工作的搜索跟踪系统,隐蔽性能好,抗电子干扰,可全天24小时工作,因此在电磁压制时能够和预警雷达配合使用,弥补雷达的不足[3]。随着红外搜索与跟踪系统的发展,人们对红外成像系统的视场和分辨率提出了更高的要求,研究大视场、高分辨率及高灵敏度的红外目标搜索跟踪系统具有重要意义[4]。
红外光学系统实现大视场观测主要通过扫描成像、多镜头拼接成像、超大视场凝视成像三个技术途径。扫描是红外系统常用的扩大探测视场、增加空间分辨率的方法。在总结现有的光机扫描技术的基础上,设计实现视场106°,焦距120mm,有效通光口径50mm的像旋扫描光学系统[5]。为了得到靶场测量中需要的大视场全景视频图像,将4个1.1°×0.88°的视场拼接得到一个大约3.3°×1.76°的大视场,这种拼接系统靠多个小视场光学系统得到大视场,光机结构相对简单、可靠,可用性和实用性较好[6]。采用4×3阵列式排列的12组视场角同为33°×24°的目镜系统拼接成单眼目视光学系统,实现了系统的大视场设计[7]。法国Artemis采用3个传感器实现360°全景成像,同时保持全凝视概念的高性能水平,红外搜索跟踪传感器单元以10Hz的频率在中波红外波段(3~5μm)完成场景获取,方位视场大于120°、高低视场26°,其中红外搜索跟踪传感器单元采用一个单一的具有先进红外焦平面阵列的被动红外成像器在视场中的每个单独区域以高速率获取初步的图像,再通过图像拼接获得整个场景图像[8]。
本文旨在设计具有小型化、集成化的兼具大视场和高分辨率的红外搜索成像系统。此系统将在未来军事应用中的水面舰艇对空中和海面威胁的感知能力提升、机载红外告警系统等方面具有不可比拟的优势,对提高我国的国防力量,增强我军红外成像、光电防御等方面将起到至关重要的作用。
1 系统工作原理
为解决大视场和高分辨率成像之间的矛盾,本文通过偏移视场棱镜组与扫描镜机构结合方式解决这一问题,系统工作原理如图1所示。其中偏移视场棱镜组由9组棱镜组成,均匀分布在扫描镜机构的扫描圆周上,每组棱镜位置对应一个偏移视场。扫描镜机构由两块45°平行反射镜组成,在伺服控制下围绕成像系统光轴中心线转动,这种扫描方式最大的特点是:视场拼接只与偏移棱镜有关,而与扫描运动无关;扫描镜的控制要求低,匀速转动,不需要在棱镜位置停顿,转动中有摆动也不影响成像。
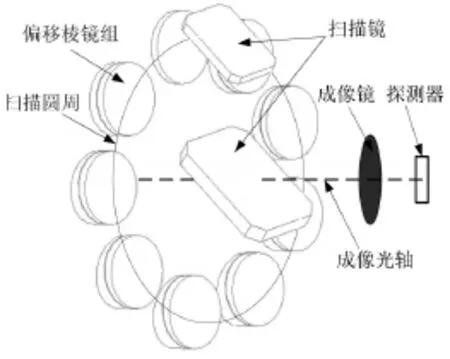
图1 偏移视场棱镜组分布
该系统由多个偏移视场棱镜组通过扫描镜组共用一组成像光学系统。扫描机构转动经过每个棱镜视场,按特定的时序在积分时间内采集图像,再利用拼接算法将这些图像按采集时间拼接为全景大视场。本文主要介绍系统的光学设计与机械结构设计部分。
2 光学系统设计
2.1光学系统结构与设计指标
光学系统结构由偏移视场棱镜组、扫描镜和成像镜头三部分组成,如图2所示,偏移棱镜组通过光学扫描的方式实现对单个凝视视场的视场偏移,扫描镜实现对各偏移视场的选通扫描成像。单个凝视成像镜头工作波段为中波红外,焦距为75mm,F数为2,单个凝视视场为6.87°×5.50°,9个凝视视场水平拼接,由于拼接过程中存在视场重叠,因此拼接后的视场为6.87°×45.10°,全视场图像刷新频率为10Hz,探测器像元数为320×256,像元大小为30μm,拼接后图像的像元数为320×2304(256×9)。
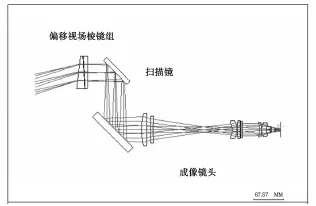
图2 光学系统设计结构
2.2偏移视场棱镜组设计结果
偏移视场棱镜以光学扫描的方式实现了大视场,中心无偏移视场棱镜为厚度为8mm的平行硅板,其余8组棱镜负责偏移的角度两两对称分别为± 5°、±10°、±15°及±20°,4对偏移视场棱镜组均由硅及锗两种材料组成,且第一块棱镜的后表面与第二块棱镜的前表面平行,二者间隔均为1mm,第二块棱镜的后表面为平面,由于棱镜倾斜角度规整会引起一定的视场偏移,经分析该偏移量均小于一个像元。偏移棱镜的结构参数如表1所示。
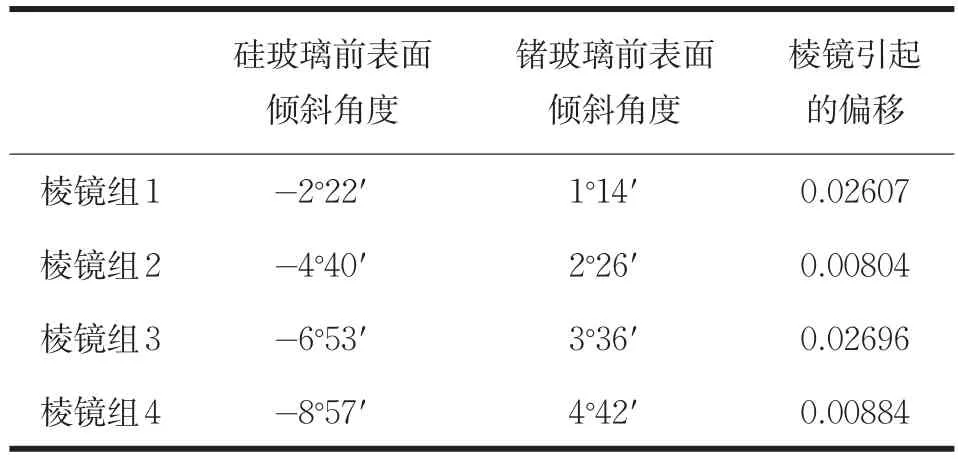
表1 偏移棱镜的结构参数
2.3像质评价
系统成像质量主要由后端的成像镜头决定,后端成像系统口径D=40mm,F数为2,单个凝视视场为6.87°×5.50°。系统设计时采用硅及锗两种红外材料,所有镜片均为球面,中间三片作为调焦镜,实现温度及距离调焦功能,通过二次成像的冷阑匹配设计提升系统的杂散光抑制能力,从而保证图像质量。最终形成如图1所中所示的光学系统,其成像系统MTF曲线及像差曲线如图3及图4所示。从图中可以看出,在探测器的特征频率20lp/mm处,不管是中心视场还是边缘视场,该光学系统的传递函数均接近衍射极限。由图4中可以看出成像系统像差校正良好,残余像差都较小。

图3 成像系统传递函数曲线
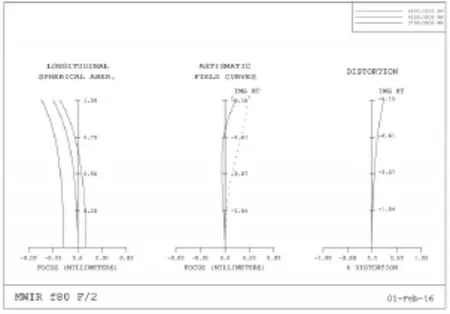
图4 系统像差曲线
3 机械结构设计
根据光学设计结构,偏移视场棱镜组均布在扫描圆周上,现将单个棱镜组片安装到棱镜筒里,棱镜筒均安装在支架上,调试时棱镜筒部件旋转至合适的角度位置,用压片压紧固定;成像部分的调焦机构采用丝杠螺母调焦机构,利用螺纹副将电机的旋转运动转化为调焦部件直线运动的机构,其结构简单,加工方便,能够自锁,通过步进电机和电位计来控制调焦精度,调焦精度(调焦步长)≤0.01mm[9]。这里主要介绍机械结构设计中的关键机构扫描镜机构。
3.1反射镜组转动速率
光学结构设计的全视场图像刷新频率为10Hz,采集9个凝视视场得到全视场图像的帧频为90Hz,由此本文选用帧频为100Hz的中波红外探测器。根据图像刷新频率得到扫描镜转动速率为10r/s,所以反射镜组的转动速率ω:

3.2传动装置设计
扫描镜机构旋转的高速稳定是保证后续图像拼接的前提,传动系统装置主要考虑以下两方面内容:(1)扫描镜机构在成像光轴方向上不能有过大的回转误差,否则反射镜在积分时间内有晃动,会发生相移,图像呈现虚化现象,影响成像质量。(2)扫描镜装置要求转速平稳,在上述高速转动时误差不能过大,否则影响图像采集。

图5 扫描机构图
图5所示为传动装置的设计机构,反射镜座固定在旋转圆盘上,小反射镜中心对准偏移棱镜组片中心,大反射镜中心对成像镜光轴中心,旋转圆盘与旋转套筒同心固定,传动装置选用齿轮副传动,齿轮传动精度较高,传动平稳、效率高、寿命长,结构更为紧凑,小齿轮与传动电机输出轴端同心固定,大齿轮与旋转套筒同心固定。转动轴承采用刚性较高、可承受倾覆力矩的背对背角接触,轴承内圈与旋转套筒内圈固定,轴承外圈与旋转支架过盈配合,轴承两侧加端盖固定,通过螺钉加紧端盖固定[10]。采用十个挡片、两光电开关来控制图像的采集时序。驱动系统选用maxon产品组合系统,具体包括电机,编码器和控制器。
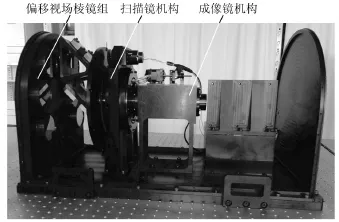
图6 整体机构设计图
完成加工装调后的样机实体如图6所示,系统重量52kg,通电运转良好,扫描镜系统转速均匀稳定,通过电机的编码器检测到转速误差不大于±1%,结果表明均能达到光学和机械提出的设计要求。
4 结论
基于研制具有小型化、集成化、兼具大视场和高分辨率的红外预警系统,本文设计的光学机构形式包括偏移视场棱镜组、扫描机构和成像镜头三部分,通过偏移棱镜组合扫描成像方法实现了大视场和高分辨的矛盾。光学设计的单个凝视视场范围为6.87°×5.50°,通过上述扫描方式获得6.87°×45.10°的大视场,并对系统的成像质量进行了分析与评价,在20lp/mm时系统MTF接近衍射极限。完成了机械加工装调,系统实现了小型化,通电运转良好,扫描转速均匀稳定,转速误差小,达到光学和机械提出的设计要求。
[1]孙泼,朱振福,邓蓉,等.红外搜索与跟踪系统中光学指向器的设计[C]//2004年全国光电技术学术交流会,2004:384-387.
[2]贾庆莲.周视红外搜索系统对空中目标的搜索模型[J].长春理工大学学报:自然科学版,2015,38(3):6-10.
[3]吴耀.大视场红外搜索光学系统研究[D].哈尔滨:哈尔滨工业大学,2011.
[4]王浩宇.基于空间调制原理的红外搜索跟踪光学系统研究与设计[D].哈尔滨:哈尔滨工业大学,2013.
[5]张东阁.大视场高分辨率空间红外光学系统关键技术研究[D].上海:上海技术物理研究所,2014.
[6]于晓波,盛磊.靶场测量中多镜头大视场视频图像的拼接[J].光学精密工程,2008,16(11):2145-2150.
[7]卢海平,刘伟奇,康玉思,等.超大视场头盔显示光学系统设计[J].光学精密工程,2012,20(5):979-987.
[8]Grollet C,Megaides V.ARTEMIS:staring IRST for the FREMM frigate[J].Proc SPIE,2007,6542:654233-654233-12.
[9]杨会生,张银鹤,柴方茂,等.离轴三反空间相机调焦机构设计[J].光学精密工程,2013,21(4):948-954.
[10]杜宏亮.基于成对双联角接触球轴承的摩擦力矩特性分析[J].机械,2011(2):25-27.
The Optic-mechanical Design ofthe Infrared Search System with Large Field of View
PENG Jiahao,LIU Tao,DENG Jian
(Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Sciences,Changchun 130033)
The infrared search system with characteristics of miniaturization,integration,large field of view and high resolution was designed.Firstly,working principle of the infrared search system was described,which used scan imaging method of stitching the nine gaze view pictures to obtain images with large field of view and high resolution.Optical system construction consists of offsetfield prism,scanning mirror and imaging lens.The field range of each staring field is 6.87°×5.50°,and then a wide field of 6.87°×45.10°is acquired by the above scan imaging method.Analyzing and evaluating the imaging quality of the optical system explain that:optical system MTF is close to diffraction limit at 20lp/mm.The transmission of scanning mirror system and timing design of image acquisition were emphatically introduced in mechanical structure design.This system weights 52kg after manufacture and assemblage;moreover,the scanning system is able to realize smooth operation.Thus,all the results of the optic-mechanical design have met the design requirement.
large field of view;high resolution;infrared search;scan imaging;design
TN216
A
1672-9870(2016)03-0005-04
2016-01-29
彭家浩(1988-),男,硕士研究生,E-mail:pjhideal@sina.com
