多电平逆变器通用简化空间矢量调制法*
2016-09-16王哲禹江苏大学电气信息工程学院江苏镇江212013
郑 宏,黄 俊,王哲禹,张 云(江苏大学电气信息工程学院,江苏镇江212013)
多电平逆变器通用简化空间矢量调制法*
郑宏*,黄俊,王哲禹,张云
(江苏大学电气信息工程学院,江苏镇江212013)
传统SVPWM算法需要扇区判断和繁琐的三角函数运算,且所有的基本电压矢量必须预先计算并储存起来供后续运算调用,既增加了控制器的计算量,又占用了一定的存储空间。为此,提出一种通用简化空间矢量调制法,先定位参考电压矢量的位置,并找出顶点矢量,再基于两个表格进行简单的逻辑运算即可得到所需的开关状态和开关顺序。仿真和实验结果验证了算法的有效性和通用性。
逆变器;简化空间矢量调制;顶点矢量;空间复杂度;时间复杂度
多电平逆变器因具有器件损耗小,承受的电压应力小,效率高,电流谐波畸变率低等优点,被广泛应用于中高压变频调速、电机车牵引等高压大功率场合,具有重要的研究价值[1-2]。多电平逆变器主要采用SVPWM算法[3],通过适当的矢量选择和作用时间分配加上合理的开关顺序,极大的提高输出电压的质量。
但是,随着逆变器电平数的增加,其基本电压矢量也显著增多。对于一个n电平逆变器,其基本电压矢量多达n3个。既增加了算法的复杂度,又占用了过多的存储空间。国内外学者对此作了大量研究,并提出了很多简化算法,如基于两电平的SVPWM算法、基于60°g-h坐标系的SVPWM算法和基于坐标分量的SVPWM算法。文献[4]提出了一种基于两电平的SVPWM算法,把参考电压矢量分解成三电平基本电压矢量与两电平参考电压矢量之和,将三电平问题转化为两电平,直接运用成熟的两电平算法。但是,不同扇区的坐标平移方向不一样,导致其修正变量也不一样,并且需要把两电平的开关状态转化为三电平开关状态才能驱动三电平逆变器,不易于向多电平推广。文献[5]提出了一种基于60°g-h坐标系的SVPWM算法,将a-b-c坐标系下的逆变器输出基本矢量变换为60°g-h坐标的形式,所有基本矢量的坐标都归一化为整数。对于任意的参考矢量,分别对其坐标向上和向下取整,得到它的最近三矢量。但这种算法中最近三矢量为二维坐标表示,要驱动三电平逆变器,还需要进行复杂的坐标变换。文献[6]提出了一种基于坐标分量的SVPWM算法,只需一次计算参考电压矢量在新坐标系中的分量,即可快速判断参考电压矢量所在位置并计算矢量作用时间,但随着电平数的增多,各矢量坐标的求取变得复杂,且要进行坐标分解。
本文首先介绍三电平NPC逆变器空间矢量的基本原理,然后针对上述问题,提出一种新的通用简化SVPWM算法,在时间复杂度和空间复杂度上较其他算法有明显优势,下面以三电平NPC逆变器为例进行详细介绍。
1 三电平NPC逆变器空间矢量基本原理
三电平NPC逆变器的拓扑结构如图1所示[7-8]。直流侧电容C1和C2两端的电压都为Vdc/2,逆变器每相输出电压有3种状态,定义其开关状态为Si:

i={a,b,c},Sa、Sb、Sc分别代表a相、b相、c相的开关状态。

图1 三电平NPC逆变器拓扑结构
则各相的电压可表示为:

定义三电平NPC逆变器的输出电压矢量为:

逆变器可以输出33=27种不同的电压状态[9],对应的空间矢量有19种,如图2所示。其中零矢量1种,对应3种开关状态;小矢量6种,对应12种开关状态;中矢量和大矢量各6种,分别对应6种开关状态。

图2 三电平NPC逆变器空间矢量图
2 简化空间矢量调制法
2.1定位参考电压矢量
如图3所示的参考电压矢量定位图,其基本电压矢量的开关状态无需提前计算并储存,只需由零矢量NNN通过逻辑运算即可得到所需矢量的开关状态。参考电压矢量Vref被最近三矢量OP1、OO1、OP2的顶点P1、O1、P2构成的“调制三角形”包围起来,为了合成参考电压矢量Vref,首要任务就是确定它的最近三矢量OP1、OO1、OP2[10],并计算出顶点P1、O1、P2的开关状态。
参考电压矢量Vref由“顶点矢量”和“剩余矢量”相加得到。所谓“顶点矢量”就是连接两个相邻顶点的矢量,它将三电平空间矢量图的中点O与调制三角形△P1O1P2的第一个顶点 P1连接起来,即OP1。所谓“剩余矢量”就是在“调制三角形”内部,连接参考电压矢量Vref和“调制三角形”△P1O1P2第一个顶点P1的矢量,即Vref′。

图3 参考电压矢量定位图
将三电平空间矢量图分解为6个两电平空间矢量图,它们的中点分别位于P1、P2、P3、P4、P5、P6。然后用6条连接中点的虚线将三电平空间矢量图平分成1~6扇区,这6条虚线的角度从π/6到11π/6,相邻两条虚线之间相差π/3。为了获得“顶点矢量”,需要确定参考电压矢量位于哪个嵌套两电平空间矢量图中。我们规定,当参考电压矢量Vref与某个嵌套两电平空间矢量图的中点位于同一个扇区时,就认为参考电压矢量Vref位于该嵌套两电平空间矢量图中。在图3中即表示为参考电压矢量的角度θ0位于如下区域:

继而得到“顶点矢量”,也就是连接三电平空间矢量图中点O和该嵌套两电平空间矢量图中点P1的矢量。“顶点矢量”的角度φ可由下式表示:

式中,θ0∈[0,2π],函数int(x)表示对x进行取整运算,函数mod(x,y)表示y除以x后取余运算。最后即可得到“剩余矢量”:

得到“顶点矢量”之后,就要确定其顶点处的开关状态。为了分析方便,我们令P=2,O=1,N=0。从零矢量NNN(即000)开始,通过调整对应相的开关状态(加1或减1)并在各相基础上加上一个常数N即可得到“顶点矢量”顶点处(即“调制三角形”的第一个顶点)的开关状态,其调制规则如表1所示。
不同的S值有不同的调整规则,这里的S即为参考电压矢量的扇区号,它的值可由下式表示:

φ即为“顶点矢量”的角度。表1中,A,B,C分别表示A,B,C相的开关状态。向上箭头“↑”表示该相的开关状态需要增加1,相反,向下箭头“↓”表示该相的开关状态需要减小1。设调整后的开关状态为SaSbSc,加上常数N后“顶点矢量”顶点处的开关状态为

这里的N由下式计算得到:

函数min(Sa,Sb,Sc)表示按规则调整后Sa,Sb,Sc中的最小值,相应的max(Sa,Sb,Sc)表示按规则调整后Sa,Sb,Sc中的最大值,n为逆变器的电平数,这里n=3。
以图3中的矢量为例,零矢量为000,根据式(5)计算得到φ为0,再由式(7)计算得到S=1,对照表1,调整规则为“A↑”,调整后的开关状态为100,再由式(9)计算得到N=0,1,得到最终的开关状态为100,211,将其按照A相开关状态由小到大排列。整个流程如图4所示。

图4 开关状态产生流程图
2.2矢量作用时间计算
为了计算矢量的作用时间,将参考电压矢量所在的嵌套两电平空间矢量图单独分离出来进行研究。如图5所示。

图5 嵌套两电平空间矢量图
两电平空间矢量图中的矢量V1、V2、V3分别对应三电平空间矢量图中的最近三矢量OP1、OO1、OP2。矢量的作用时间由下式计算得出:

式中,Ts为采样周期,T1、T2分别是矢量OO1、OP2的作用时间,reg表示“剩余矢量”在嵌套两电平空间矢量中所在的扇区,其表达式为:

这里,θrem(0≤θrem≤2π)表示“剩余矢量”的角度,函数int(x)表示对x进行取整运算。最后得到每个矢量的作用时间为:

式中,Vrx和Vry分别代表Vref′/Vdc的实数部分和虚数部分;T0表示“顶点矢量”OP1(对应两电平空间矢量图中的零矢量V1)的作用时间。
2.3开关顺序的设计
在得到“顶点矢量”顶点处的开关状态后,就可以以此点的开关状态为起点设计开关顺序。我们知道,在设计开关顺序时必须满足如下条件[11]:(1)从一种开关状态切换到另一种开关状态的过程中,仅影响同一桥臂上的两个开关器件:一个导通,一个关断;(2)参考电压矢量从一个扇区或区域转移到另一个扇区或区域时,无需开关动作或只需最少的开关动作。由3.1节可知,计算得到的“顶点矢量”顶点处的开关状态有2个,它们按照A相开关状态由小到大顺序排列,为了满足开关顺序设计要求,初始矢量必须选择同顺序的开关状态。对于图3所示参考电压矢量,其调整规则如表2所示。

表2 开关顺序设计的调整规则
表中,reg是按照式(11)计算得到的扇区号;A,B,C分别表示A,B,C三相的开关状态;向上箭头“↑”表示该相的开关状态加1,向下箭头“↓”表示该相的开关状态减1。从表中可知,其开关顺序有两种选择,第1种是以100为起始矢量,另一种是以211为起始矢量。下面叙述图3所示参考电压矢量开关顺序产生过程:
首先,已知“顶点矢量”在顶点处的的开关状态为100和211。选取100为起始矢量,根据公式(11)计算得到reg=2,从表2可知其调整规则为BAC↑CAB↓。得到参考电压矢量在该区域的开关顺序为100-110-210-211-210-110-100。
3 仿真及实验分析
为了验证上述SVPWM简化算法的正确性及通用性,搭建了三电平NPC逆变器和五电平NPC/H桥逆变器的MATLAB仿真模型。仿真参数如下:直流侧电压Vdc=600 V,直流侧电容C=2200μF,采样频率 fs=1.2 kHz,负载为阻感负载,R=20Ω,L= 30mH。
仿真结果如图6、图7所示。图6为三电平NPC逆变器输出线电压波形(调制比ma=0.9),图7为五电平NPC/H桥逆变器输出线电压波形,其中(a)的调制比ma=0.9,(b)的调制比ma=0.4。
从仿真结果可以看出,该算法与传统最近三矢量空间矢量调制法有相同的输出特性,且其适用于多种多电平逆变器,由此验证了该通用简化空间矢量调制法的有效性。

图6 三电平NPC逆变器输出线电压(ma=0.9)
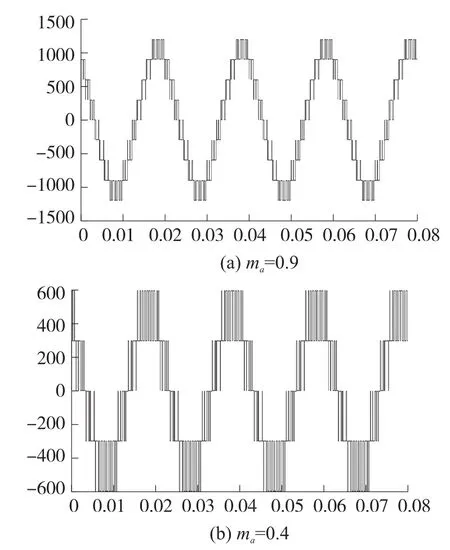
图7 五电平NPC/H桥逆变器输出线电压
为了验证算法的实际效果,基于实验室现有的三电平NPC逆变器实验平台做了实验研究,直流侧电压Vdc=100 V,调制比ma=0.9。逆变器的输出波形如图8所示,实验效果良好,实验波形与仿真波形一致。

图8 实验输出线电压(ma=0.9)
下面再从时间复杂度、空间复杂度两方面将其与传统算法、文献[4-5]的简化算法相比较,结果如表3所示(n表示逆变器的电平数):

表3 各算法的比较
本文所提出的算法由于只需产生“调制三角形”第1个点处的开关状态,即使在过调制区域,其时间复杂度也只有3 n。在空间复杂度上,只需储存“调制三角形”第1个点处的开关状态,因而其空间复杂度为O(n),而其他算法由于需要将所有基本电压矢量储存起来,因而空间复杂度为O(n3)。
由此可见,该简化算法无论是在时间复杂度还是在空间复杂度上,较其他方法都有明显的优势,且开关顺序的产生也更加快捷,只需通过逻辑运算,不需要查表。
4 结论
本文介绍了一种适用于多电平逆变器的通用简化空间矢量调制法,以最简单的三电平NPC逆变器为例进行论述。在该算法中,所有的基本电压矢量不需要提前计算并储存起来,定位参考电压矢量的位置后,只需对两个表格进行逻辑运算即可得到所需的开关状态和开关顺序,既提高了控制器的运算速度,又节省了存储资源。基于此搭建了三电平NPC逆变器和五电平NPC/H桥逆变器的仿真模型,仿真结果表明该算法实现简单,通用性强。此外,在三电平NPC逆变器实验平台上进行了实验验证,从实际效果上证明了该算法的有效性。最后,与其他算法在时间复杂度和空间复杂度上进行了对比,凸显了该算法的优势。
[1] 申张亮,郑建勇,梅军.基于改进虚拟空间矢量调制方法的中点箝位型三电平逆变器电容电压平衡问题[J].电力自动化设备,2011(3):79-84.
[2] Deng Yi,Teo K H,Harley R G.A Fast and Generalized Space VectorModulation Scheme forMultilevel Inverters[J].Ranaon on Owr Lron,2013,331:1239-1243.
[3] 李泽军,王翠.多电平逆变器快速空间矢量调制算法研究[J].电子器件,2010,33(2):240-245.
[4] 夏长亮,谭智涵,张云.多电平逆变器简化空间矢量调制算法[J].电工技术学报,2013(8):218-223.
[5] 范必双,谭冠政,樊绍胜.两种快速的空间矢量脉宽调制算法比较(英文)[J].中国电机工程学报,2014,27:4613-4620.
[6] 何广明,何凤有.基于坐标分量的三电平SVPWM快速算法[J].电工技术学报,2013(1):209-214.
[7] 郑宏,蒋丽琴,蒋超.NPC逆变器混合四段法与六段法的空间矢量调制策略[J].电子器件,2014,38(4):772-776.
[8] 周京华,贾斌,章小卫.混合式三电平中点电位平衡控制策略[J].中国电机工程学报,2013(24): -.
[9] 王兆宇,艾芊.三电平逆变器空间矢量调制及中点电压控制[J].电力系统保护与控制,2011(20):131-136.
[10]胡存刚,王群京,李国丽.基于虚拟空间矢量的三电平NPC逆变器中点电压平衡控制方法[J].电工技术学报,2009(5):100-107.
[11]史晓锋,杜少武,姜卫东.中点钳位型三电平逆变器脉宽调制时的损耗特性[J].电工技术学报,2009(12):124-131.

郑宏(1965-),男,汉族,福建武夷山人,江苏大学电气信息工程学院教授,博士,硕士生导师,主要研究方向为大功率电力电子变换器、智能电网及分布式发电与储能技术,zhenghong0511@sina.com;

黄俊(1990-),男,汉族,江苏南京人,江苏大学电气信息工程学院硕士研究生,主要研究方向为电力电子变换器、有源电力滤波器,huang_jun1990@sina.com。
A Simplified and Universal Space Vector M dulation Algorithm for Multilevel Inverters*
ZHENG Hong*,HUANG Jun,WANG Zheyu,ZHANG Yun
(College of Electrical and Information Engineering,Jiangsu Uniυersity,Zhenjiang Jiangsu 212013,China)
Traditional SVPWM algorithm needs the sector judgmentand complex trigonometric operation.And allof the basic voltage vectormust be pre-computed and stored for subsequent call,not only increases the controller's workload,butalso occupy a certain amountof storage space.Therefore,a simplified space vectormodulation is proposed.Firstly,locating the reference vector,and finding the vertex vector.Then it can get all the required switch states and switch sequence based on simple logic operation of two tables.Simulation and experiment results verify the effectivenessand generality of the proposed algorithm.
inverter;simplified space vectormodulation;vertex vector;space complexity;time complexity
TM 464
A
1005-9490(2016)04-1000-05
项目来源:江苏高校优势学科建设工程项目(61074019)
2015-09-11修改日期:2015-10-16
EEACC:836010.3969/j.issn.1005-9490.2016.04.046