基于SIFT-SUSAN融合的草地障碍物识别算法
2016-09-15章思恩
邢 明,刘 瑜,任 佳,章思恩,胡 轩
(浙江理工大学机械与自动控制学院,杭州 310018)
基于SIFT-SUSAN融合的草地障碍物识别算法
邢明,刘瑜,任佳,章思恩,胡轩
(浙江理工大学机械与自动控制学院,杭州 310018)
SIFT(scale invariant feature transform)是一种对图像旋转、缩放、仿射变换具有良好不变性的机器视觉算法,在图像匹配识别上具有广泛的应用。但SIFT算法在对草地障碍物识别上存在误匹配率高和运算速度慢的问题,针对该问题提出一种SIFT-SUSAN融合算法。算法引入SUSAN算子检测并提取障碍物特征边角点,使用SUSAN提取的特征边角点和SIFT提取的特征点融合计算,对SIFT的提取特征点精简筛选后进行特征匹配。实验结果验证该算法具有可行性和有效性,提高了匹配的准确率和识别速度,且具有较好的鲁棒性。
特征提取;SIFT;SUSAN算子;图像匹配;
0 引 言
随着草地覆盖的面积在我国日趋增长,全自动割草机器人的使用已经越来越广泛。在全自动割草机器人的草地工作中,草地上的障碍物识别是一个亟待解决的问题[1]。全自动割草机器人对草地障碍物的识别效果受到视角变化、目标图像旋转缩放变换和物体遮挡的制约。近年来,局部特征匹配一直是机器视觉和数字图像处理的研究热点,SIFT是一种有效解决目标识别和匹配中的遮挡、旋转变化等问题的局部特征算法[2-4],由British Columbia大学的Lowe教授正式提出[5],并在2004年对其进行完善[6]。Mikolajczyk 等[7]对各种局部特征算子进行大量实验,指出 SIFT 算法在应对图像旋转变化、缩放变换上具有最好的效果[8],SIFT特征不仅对旋转、尺度缩放具有不变性,对视角变化和噪声也具有较好的鲁棒性[9],因此SIFT算法在草地障碍物的识别上可以排除视角变化和目标图像旋转变换等一些干扰[10]。
SIFT首先使用高斯差分卷积核DOG算子对不同尺度的目标图像进行计算[11],建立高斯图像金字塔,接着构建差分尺度空间,利用高斯金字塔进行极值点的检测[12]。为极值点添加方向向量形成SIFT特征描述子,利用样本图像和目标图像的SIFT特征描述子进行匹配识别[13]。但是目前已知的SIFT算法,包括目前应用比较广泛的结合角点检测算法Harris的SIFT-Harris算法[14],对草地障碍的特征提取都不具有针对性,对草地障碍物的特征提取容易受到草地纹理特征的干扰,从而导致误匹配点数较多。同时SIFT算子对草地障碍的特征提取容易提取数量过多的和目标草地障碍物无关的特征点,从而降低了特征匹配的运算速度。应用在全自动割草机器人工作平台上存在识别速度慢,误识别概率大等不足。
针对原SIFT算法的不足,本文提出一种基于SIFT-SUSAN融合的草地障碍识别算法。该算法采用SUSAN算子检测并提取障碍物的角点和边缘特征,SUSAN是一种边缘和角点检测算法,具有计算速度快,抗噪能力强的特点,且对于图像的角点和边缘特征有着敏感的检测能力[15]。通过SUSAN提取的边角点特征点信息和SIFT提取的极值特征点信息的融合计算,对SIFT提取的极值特征点进行精简,剔除和草地障碍物无关的极值特征点,减少无意义特征点的匹配计算次数,实现加快运算速度目的的同时排除了草地纹理特征对草地障碍物识别的干扰,降低误匹配概率。本算法的实用意义在于:实际的工作草地障碍物和草地生长情况均非常复杂,算法首先加快了全自动割草机器人对障碍物的识别速度,其次降低了草地障碍物误匹配概率,优化了全自动割草机器人对复杂草地的判断能力,加强了全自动割草机器人的工作能力并提升了全自动割草机器人的割草效率,有利于保护全自动割草机器人自身和非草地设施。
1 SIFT和SUSAN简介
1.1SIFT简介
SIFT是一种检测二维图像局部特征的尺度不变视觉算法[16-17],SIFT算法定义图像尺度空间为 L(x,y,δ),同时设输入目标图像为I(x,y) ,则尺度函数L(x,y,δ)等于高斯卷积函数G(x,y,δ)和输入目标图像I(x,y)的卷积,δ是尺度因子:
L(x,y,δ)=G(x,y,δ)×I(x,y)
(1)
(2)
G(x,y,δ)函数使得SIFT算法对复杂图像有着稳定的计算能力,可以适应复杂的草地图像处理。同时,SIFT为添加方向向量的方法使算法应对旋转和放射变换有较强的容错能力,并且为极值点添加方向向量,可以排除图像噪声对SIFT特征描述子匹配计算造成的干扰。
1.2SUSAN算法
SUSAN算法采用固定像素大小的圆形模板遍历目标图像[18-19],检测原理如图1所示。
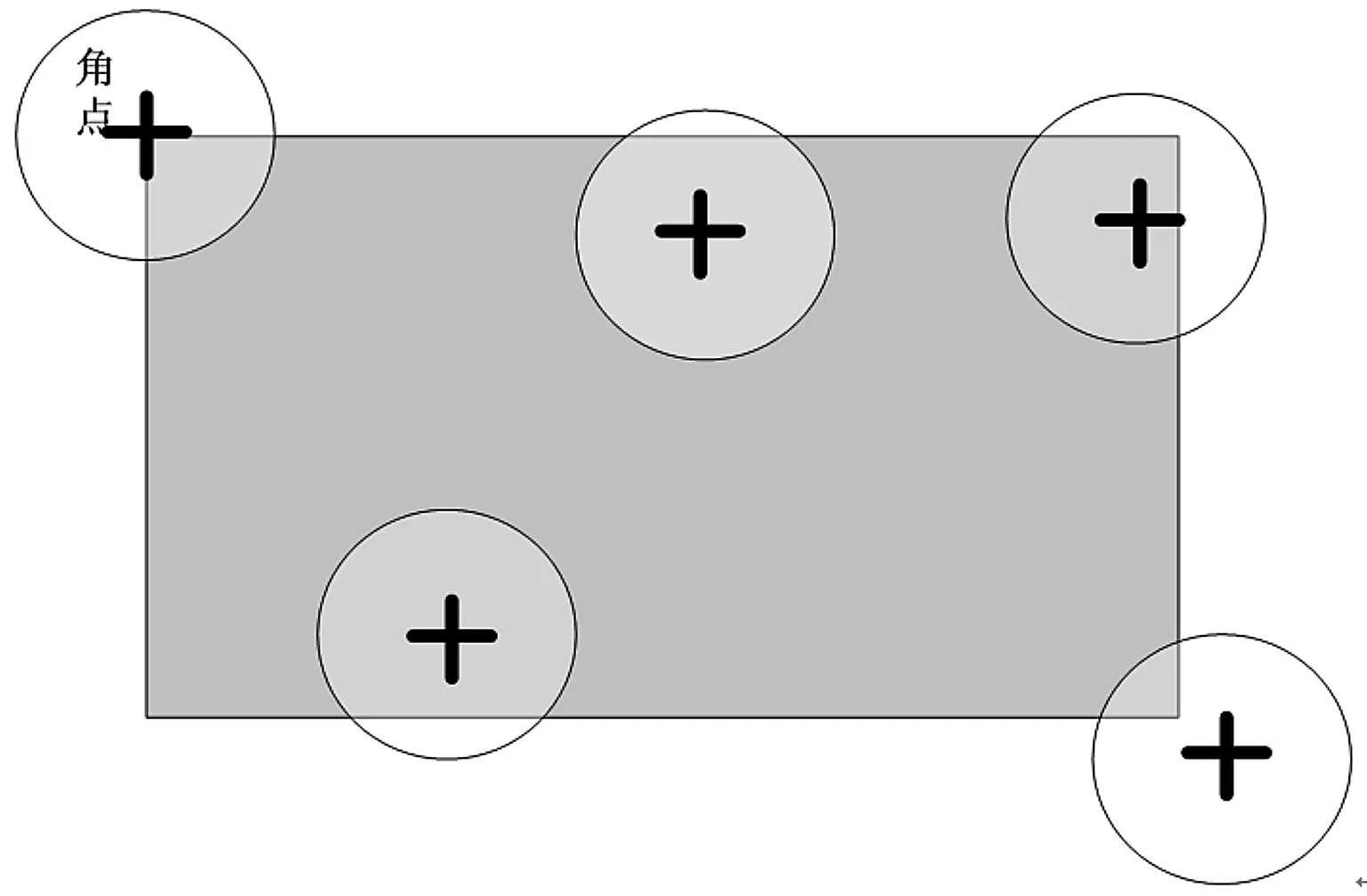
图1 SUSAN检测原理
SUSAN算子对边缘和角点进行检测时不需要进行微分的计算,这使得SUSAN算子对噪声更加鲁棒,相对文献[13]和文献[14]中引用的Harris算法,SUSAN对草地检测障碍物的边角点检测更加稳定。SUSAN检测算子能提供不依赖于模板尺寸的边缘精度。USAN区域面积的计算与模版尺寸无关,所以SUSAN边缘算子的性能不受模版尺寸影响,具有很好的鲁棒性。
2 SIFT-SUSAN融合算法
本文针对草地障碍物识别提出一种SIFT-SUSAN融合算法,利用SUSAN提取草地障碍物的边角点特征,和SIFT提取的极值特征点进行融合计算,一方面减少无关特征点的数量,加快了匹配计算的速度。另一方面,利用边角点特征和草地纹理特征的特征差异排除草地纹理特征对识别的干扰。本算法的流程如图2所示。

图2 算法流程
对样本图像I(x,y)和待匹配图像M(x,y)分别使用SIFT方法提取极值点特征,本文算法中高斯差分核的计算使用如下公式:
G(x,y,kδ)-G(x,y,δ)≈(k-1)δ2▽2G
(3)
其中:▽2为高斯因子,本文的高斯图像金字塔设置为4组,每组的子层为8层。
(4)
其中:x1至xk分别为K个极值特征点对应的横坐标信息;y1至yk分别为K个极值特征点对应的纵坐标信息;g1至gk代表K个极值特征点的尺度信息;n1至nk代表K个极值特征点的方向信息。
(5)
其中:ak(1),…,ak(128)为第K个特征点的128维特征不变量描述子。
同理,设SIFT对M(x,y)提取N个极值特征点,建立矩阵Lm和矩阵Dm,Lm和Dm具有Li和Di对应相似的矩阵结构,存储关于M(x,y)的极值特征点信息和特征不变量描述子。
对输入图像I(x,y)和待匹配图像M(x,y)分别使用SUSAN提取边角点特征,本文算法使用7×7的圆形掩板,共计一次能覆盖37个像素。判别模板中心像素和模板内其他像素差值的阈值t,本文使用如下公式计算:
(6)
其中:imax为图像灰度值中最大的值;imin为图像灰度值中最小值。本文通过如下公式判别边角点,并提取特征点信息:
(7)
其中:矩阵C存储SUSAN提取的边角点特征值。由于SUSAN算法使用模板遍历的原因,导致建立的矩阵C缺失了部分原图像边缘的值,因此本算法通过邻点差值法补足C矩阵,差值公式如下:
(8)
通过计算补足缺失的边缘值,并扩充C矩阵,得到样本图像和待匹配图像对应的边角点特征矩阵Cinew,和Cmnew。
至此,得到通过SIFT提取的极值特征点和通过SUSAN提取的边角特征点,以样本图像I(x,y)为例,为了将Cinew和Li融合计算,将Cinew单位化后,代入Li的极值特征点坐标进行精简筛选,并建立Linew矩阵保存筛选过后的极值特征点:
(9)
其中:Linew为记录筛选特征点的矩阵;利用Linew对Di进行筛选,将Di中符合条件的特征不变量描述子提取并储存在矩阵Dinew中,同理按照上文方法处理匹配图像M(x,y)得到Dmnew。
对2幅图像的特征不变量描述子进行匹配,实际是对特征不变量之间的相似性进行判别,因此通过欧式距离计算判别相似性:
(10)
V(j)=arccosθ(H(xj,yj))
(11)
其中:H为记录特征矩阵的点积结果矩阵;V为存储H反余弦计算结果的矩阵;先对V进行从小到大排序,然后对V中的相邻数据进行欧式距离计算得到匹配结果:

(12)
其中:R为经验阈值,根据文献[2]~文献[5],R对计算结果不会造成影响,一般取0.6;M(i)为记录匹配结果的矩阵。
3 实验结果
为了验证本文的算法,在Matlab环境下编程实现本文算法。分别使用SIFT算法和SIFT-SUSAN融合算法,以及SIFT-Harris算法进行了A、B、C3组识别对比试验,A组是常见的草地植物障碍识别实验,图3是A组3种不同算法的实验效果对比图。B组是常见的草地人工障碍物识别实验,图4是B组3种不同算法的实验效果对比图。C组是草地无障碍场景的识别实验,图5是C组3种不同算法的实验效果对比图,3组对比实验图中,自动配准点均使用线连接。
分别使用SIFT算法和本文算法,以及SIFT-Harris算法对3组图像进行特征点匹配的正确率和匹配时间统计对比结果如表1-表3所示。

图3 A组实验效果对比
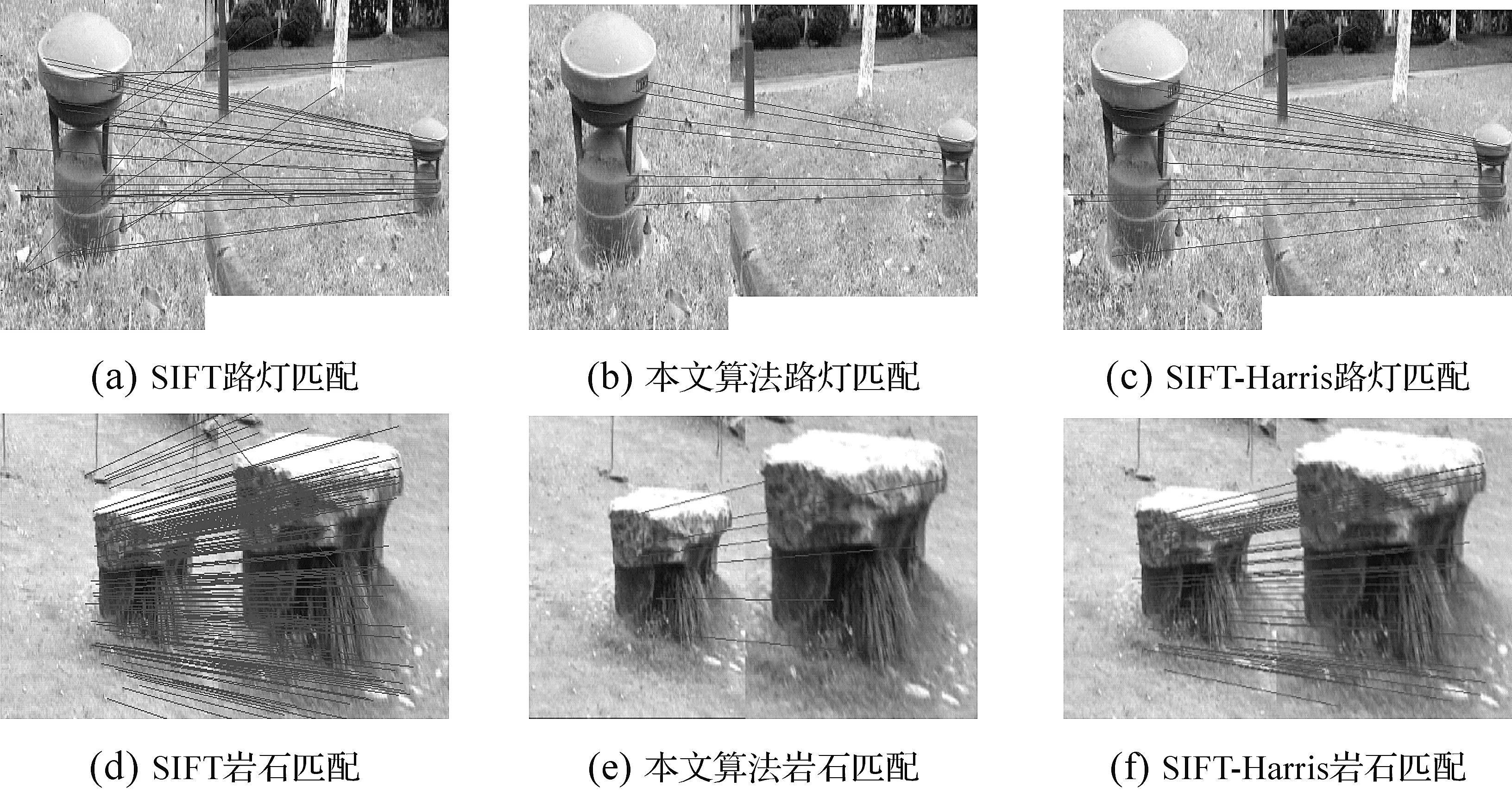
图4 B组实验效果对比
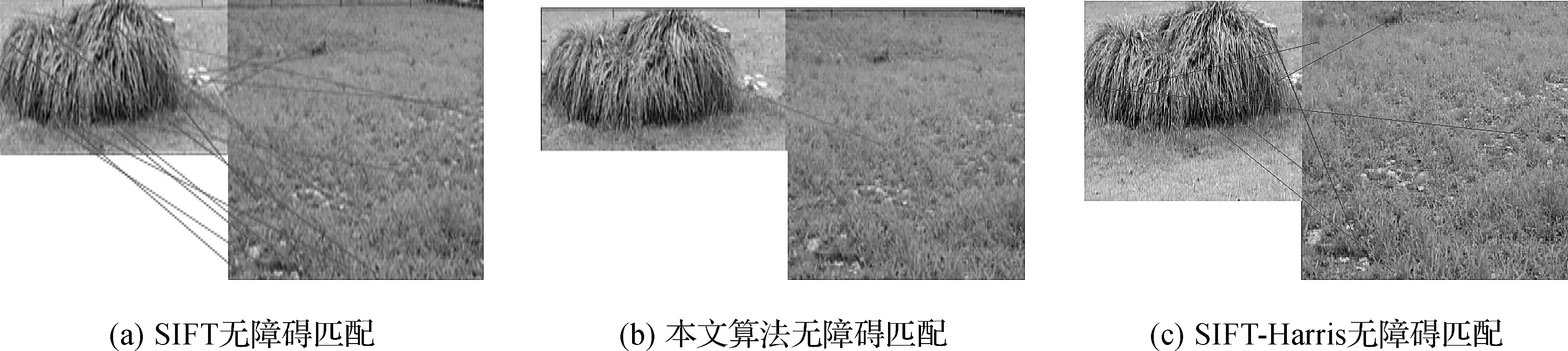
图5 C组实验效果对比

A组提取特征数/点匹配数/对误匹配/对误匹配率/%消耗时间/sSIFT草堆匹配10501833021.467.2本文算法草堆匹配371416.674.0SIFT-Harris草堆匹配23235411.44.4SIFT树木匹配15501673520.969.1本文算法树木匹配305005.1SIFT-Harris树木匹配2103538.56.2
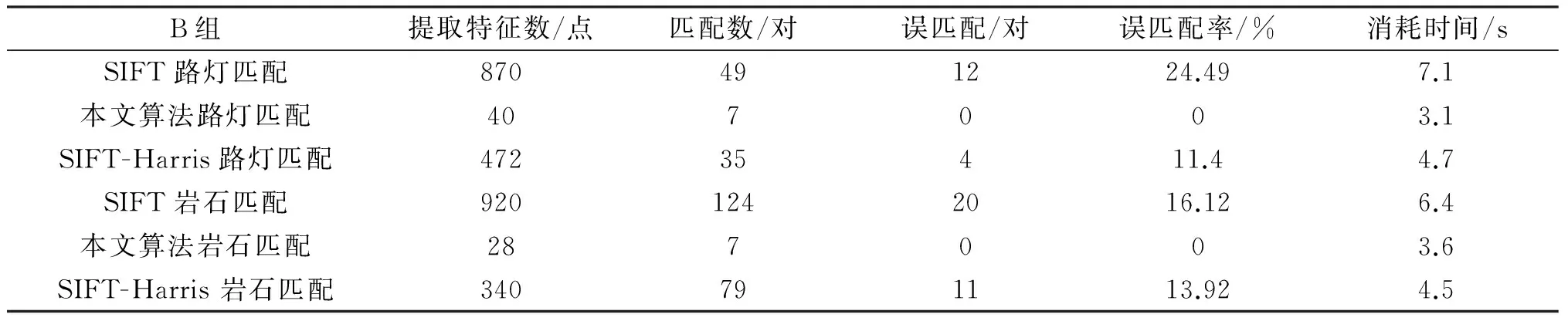
表2 B组实验效果对比统计结果

表3 C组实验效果对比统计结果
从表1中A组的实验对比统计结果可以发现,在针对草地植物障碍物的识别上,本文算法的检测速度相对原SIFT算法大幅度提升,比文献[14]提出的SIFT-Harris算法速度更快。本文算法提取的特征点数和匹配的对数比原SIFT算法和SIFT-Harris算法都少,但是从图3(a)—(f)的效果对比可以观察到本文算法成功匹配的特征点足够充分识别出障碍物,证明本文算法在保证识别有效性的前提下提高了计算速度。并且本文算法在正确匹配率上相对原SIFT算法有所提高,相对SIFT-Harris算法误匹配更少。表2中B组实验对比的统计结果证明本文算法在针对草地人工障碍物上的计算速度要优于原SIFT算法和SIFT-Harris算法,且误匹配对数也更少。虽然本文算法提取的特征点数和匹配对数比原SIFT算法和SIFT-Harris算法都少,但是从图4(a) — (f)的效果对比可以很明显观察出,本文算法成功匹配的特征点已经足够充分识别人工障碍物。表3中C组对比实验是对于无障碍草地场景的3种算法实验效果对比,统计数据表明本文算法仅有一个误匹配点,而原SIFT算法和SIFT-Harris算法误匹配点较多,证明本文算法在提取草地障碍特征时能较好的排除草地纹理特征的干扰,在针对草地障碍物的识别上相对原SIFT算法和SIFT-Harris算法具有更好的鲁棒性。
4 结 语
实际的草地障碍物种类纷繁,并且草地生成情况都很复杂,对草地障碍的判断能力和识别速度决定了全自动割草机器人的工作效率和安全性。本文在原SIFT算法的基础上,引入SUSAN算法,设计了SIFT和SUSAN相结合的方法针对性的识别草地障碍物,经过实验验证,本文算法不仅能加快对障碍物识别的运算速度,同时降低了误匹配率,是一种针对草地障碍物适用性比较好的识别算法。后续工作将针对不同类型的障碍物进行分类并细化提取的特征点,进一步优化算法的识别能力。
[1] 汤一平,姜荣剑,林璐璐.基于主动式全景视觉的移动机器人障碍物检测[J].计算机科学,2015,42(3):284-288,315.
[2] WU X, ZHAO Q, BU W. A SIFT-based contactless palmprint verification approach using iterative RANSAC and local palmprint descriptors[J]. Pattern Recognition, 2014, 47(10):3314-3326.
[3] SMITH R E. The effects of SIFT on the reproducibility and biological accuracy of the structural connectome.[J]. Neuroimage, 2015, 104:253-265.
[4] LIU Y, LIU S, WANG Z. Multi-focus image fusion with dense SIFT[J]. Information Fusion, 2015, 23:139-155.
[5] LOWE D G. Object recognition from local scale-invariant feature [C]. Proceedings of the IEEE International Conference on Computer Vision (ICCV'99), 1999,2:1150- 1157.
[6] LOWE D G. Distinctive Image Features from Scale-Invariant Keypoints[J]. International Journal of Computer Vision, 2004, 60(2):91-110.
[7] MIKOLAJCZYK K, SCHMID C. An affine invariant interest point detector[J]. International Journal of Computer Vision, 2002, 23(50):128-142.
[8] 杨世沛,陈杰,周莉,等.一种基于SIFT的图像特征匹配方法[J].电子测量技术,2014,37(6):50-53.
[9] 傅卫平,秦川,刘佳,等.基于SIFT算法的图像目标匹配与定位[J].仪器仪表学报,2011,32(1):163-169.
[10] 蔡健荣,周小军,王锋,等.柑橘采摘机器人障碍物识别技术[J].农业机械学报,2009,40(11):171-175.
[11] 魏利胜,周圣文.新型优化SIFT的图像快速配准方法研究[J].计算机工程与应用,2015(5):167-171.
[12] 姜小会,陈清奎,何强,等.一种基于SIFT和改进RANSAC的稳健图像拼接算法[J].电脑知识与技术,2015(1):127-129.
[13] 陈梦婷,闫冬梅,王刚.基于Harris角点和SIFT描述符的高分辨率遥感影像匹配算法[J].中国图象图形学报,2012,17(11):1453-1459.
[14] WANG Y Q, LIANG B, ZHUANG L L. Applied technology in unstructured road detection with road environment based on SIFT-Harris[J]. Advanced Materials Research,2014,1014:259-262.
[15] SMITH S M, BRADY J M. SUSAN:a new approach to low level image processing[J]. International Journal of Computer Vision, 1997, 23(1):45-78.
[16] 王帅,孙伟,姜树明,等.基于旋转不变特征的SIFT描述子在图像配准中的应用[J].计算机应用,2014,34(9):2678-2682.
[17] 何瑾,丁学文,张昊.应用边缘图像SIFT特征配准印鉴图像[J].计算机工程与应用,2015(3):152-156.
[18] 卢力,王勇涛,田金文,等.基于SUSAN算法的遥感图像去云[J].通信学报,2006,27(8):160-164.
[19] 陈丽莉.基于SUSAN算法的角点检测[J].现代计算机:专业版,2009(5):75-77.
(责任编辑: 陈和榜)
Grass Obstacle Recognition Algorithm Based on SIFT-SUSAN Fusion
XINGMing,LIUYu,RENJia,ZHANGSien,HUXuan
(Faculty of Mechanical Engineering & Automation, Zhejiang Sci-Tech University, Hangzhou 310018, China)
SIFT (SCALE Invariant Feature Transform), which is a kind of machine vision algorithm with good invariance in image rotation, zoom and affine transformation, is widely used in image matching and recognition. However, there are problems of high mismatching rate and slow arithmetic speed in identification of grass obstacles by using SIFT algorithm, In ordering to solve such problems, a SIFT - SUSAN fusion algorithm is put forward. The fusion algorithm introduces the SUSAN operator to detect and extract the characteristic edge-corners of obstacles; fusion calculation is carried out by using the characteristic edge-corner points extracted with SUSAN and characteristic points extracted with SIFT; then, feature matching is conducted after downsizing and filtration of characteristic points extracted with SIFT. Experimental results verify the validity and the feasibility of the algorithm in this paper. This algorithm enhances the accuracy rate in matching and recognition speed; besides, it also has a high robustness.
feature extraction; SIFT;SUSAN operator;image matching
10.3969/j.issn.1673-3851.2016.05.018
2015-06-21
国家自然科学基金项目(61203177)
邢明(1990-),男,浙江杭州人,硕士研究生,主要从事图像处理和模式识别方面的研究。
刘瑜,E-mail:liuyu@zstu.edu.cn
TP391
A
1673- 3851 (2016) 03- 0427- 06 引用页码: 050606