便携式静中通天线控制系统设计
2016-09-14李敬一北京航天光华电子技术有限公司100854
李敬一(北京航天光华电子技术有限公司,北 京 100854)
便携式静中通天线控制系统设计
李敬一
(北京航天光华电子技术有限公司,北 京 100854)
对便携式静中通天线控制系统的设计方法进行了论述。便携式静中通天线是一种复杂的高度集成的机电一体化产品,其控制系统主要由传感器检测部件、主控板组成,对星过程采用十字对星法,控制效果好。该系统能够通过一键对星或上位机操作进行对星,操作简单、质量轻、体积小、便于携带,适用于各种应急救灾场所。
静中通,天线,控制系统,对星
自然灾害发生时,地面通信网络容易遭到破坏,且难以快速恢复。建立先进的应急通信系统,能够为抢险救灾争取时间、减少损失。卫星通信具有覆盖面大、频带宽、容量大、适用于多种业务等优点,可以作为应急通信的一个重要手段。建立天地一体化通信网络,当发生重大灾害而导致网络瘫痪时,提供快速、可靠的应急通信覆盖,是通信网络建设中值得重视的问题。因此,便携式静中通天线应运而生。
便携式静中通天线主要完成卫星的自动对星功能,具有一键对星、易于安装、操作、集成等特点,成本低,应用广泛,具有良好的市场前景和显著的经济效益。
1 便携式静中通天线控制系统的组成
便携式静中通天线控制系统的主控板为整个控制系统的核心,主要完成天线方位、俯仰、极化三轴的控制,以及与信标机、上位机等的通讯功能,控制系统框图如图1所示。
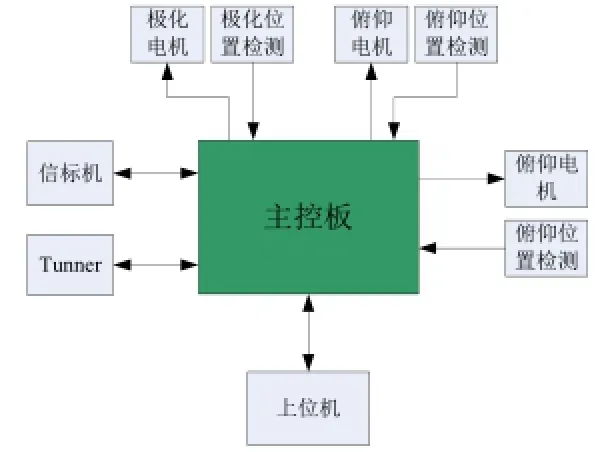
图1 控制系统框图
2 传感器检测部件选取
2.1 俯仰轴传感器
俯仰轴位置检测单元选用倾角传感器,主要用来确定俯仰轴的位置信息,俯仰轴在升起和下降过程中位置变化缓慢,倾角传感器能够满足使用要求。
2.2 方位轴传感器
分别在天线座天线方位转动范围的左、中、右位置放置3个限位开关,上电后,天线方位轴向固定方向转动,碰触到某个限位开关时即可获取当前的绝对角度信息,如图2所示。
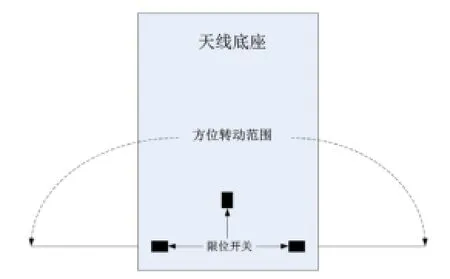
图2 限位开关获取绝对位置
2.3 极化轴传感器
绝对值编码器为数字量输出,输出当前的绝对角度,精度可达16位及以上,价位较高,适用于对精度要求较高的场合。考虑到本系统对精度要求较高,且用于恶劣环境,因此,选用绝对值编码器进行极化电机位置检测。
3 主控板设计
主控板上各模块及与外围传感器的通信关系如图3所示。
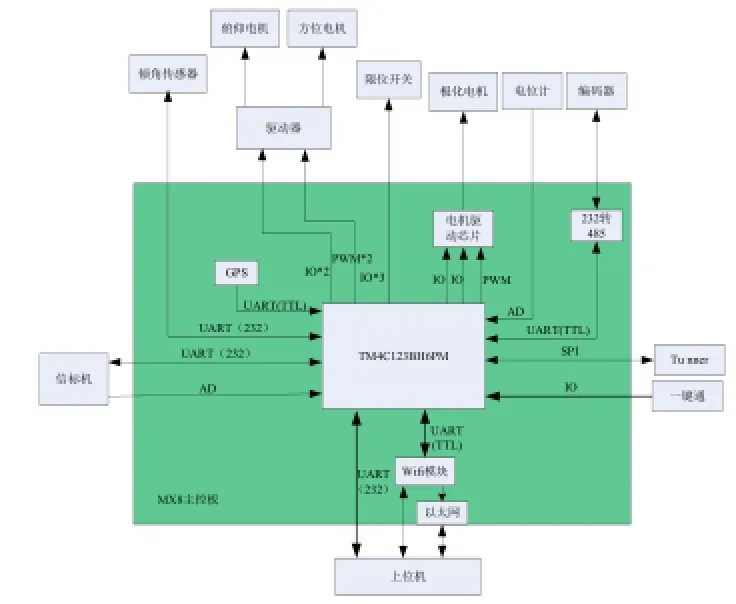
图3 主控板功能框图
3.1 电源模块
静中通天线控制系统的主控板供电电源电压为24V,电位计供电电压为12V,倾角传感器、绝对值码盘、信标
电源输入模块的电路如图4所示,采用贴片式肖特基二极管进行反接保护,肖特基二极管具有正向偏置电压低的特点,SK24的正向偏置电压为0.5V,损失的压降较小;选用自恢复式保险丝进行电流保护,防止在电流过大时损坏其它重要器件;SMBJ26CA稳压管用于防止浪涌,型号选用原则为击穿电压VBR为工作电压的0.85倍。
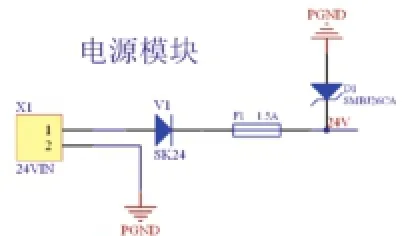
图4 电源输入模块
图5、图6分别为24V转12V模块和24V转5V模块,分别选用电压转换芯片LM2676S-12和LM2677-5,驱动能力分别为3A和5A,采用DATASHEET中的推荐电路进行设计:输入采用大电容和小电容并联的方法进行低频和高频滤波;输出电压采用低ESR的钽电容进行滤波;SR34 和6TQ045S均为肖特基二极管,当电压转换芯片突然关断时,二极管将输出电压钳位在0V以下。此外,该模块还采用稳压管及自恢复式保险丝进行过压过流保护。
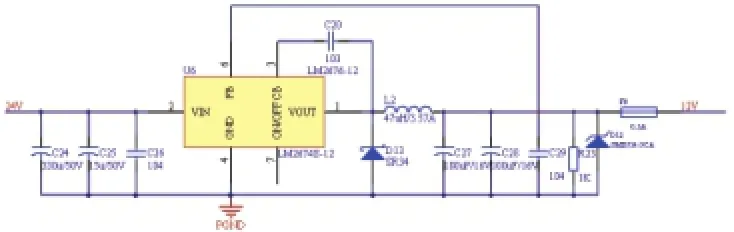
图5 24V转12V
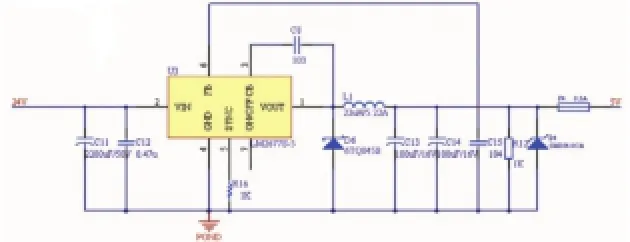
图6 24V转5V
图7、图8分别为5V转3.3V和3.3V转1.8V模块,输出采用稳压管和自恢复式保险丝进行过压过流保护。
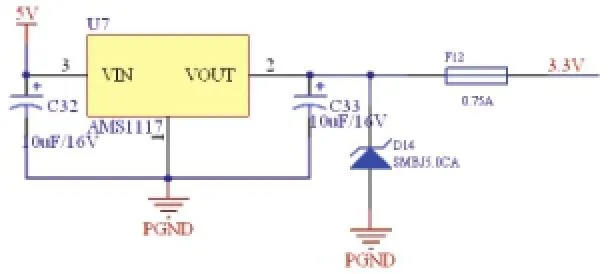
图7 5V转3.3V
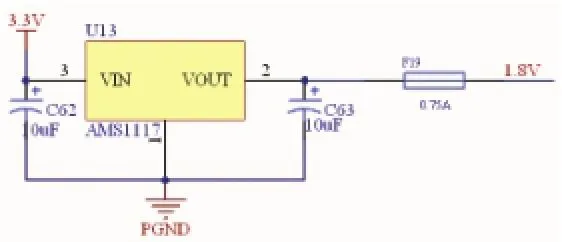
图8 3.3V转1.8V
图9为电源隔离模块,采用磁珠分别将电源隔离成数字电源、模拟电源,将地隔离成数字地和模拟地。
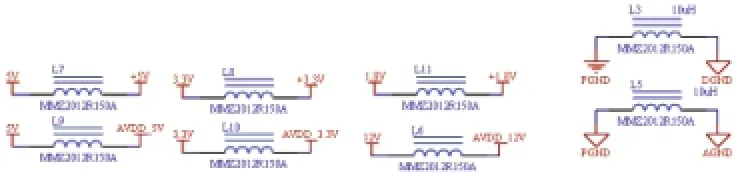
图9 电源隔离
3.2 主控芯片最小系统
主控芯片选用基于Cotex M3内核的控制芯片TM4C123BH6PM,具有丰富的外设和浮点运算功能;采用库函数进行编程设计,简化了开发流程,提高了效率。由于TM4C123BH6PM出色的特性,该系列芯片被广泛用于自动化与过程控制、消费类和便携式电子产品、人机界面、工业、照明等领域。
图10为主控芯片最小系统,分别采用模拟电源和数字电源进行供电,采用MAX809进行上电复位检测,16M外接无源晶振源,采用2.0间距的JTAG下载接口,小巧方便。
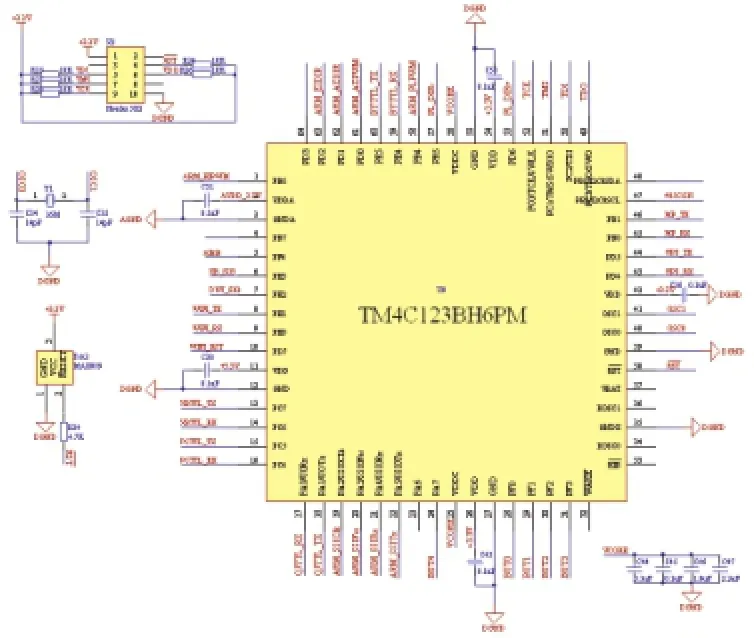
图10 主控芯片最小系统
3.3 A/D转换调理电路
图11为A/D(模拟/数字)转换调理电路,共两路,分别为信标机AGC电压和电位计输出电压调理电路,OPA2353为两路集成运放芯片。A/D调理电路由电压比例电路、电压跟随器和二阶压控电压低通滤波电路组成。电压比例电路通过匹配合适的电阻,将输入信号的模拟电压值降至ARM芯片A/D模块输入电压的范围(0V~3.3V)。当A/D模块的输入阻抗较小时,要求信号源的阻抗更小,这样,A/D采集才会比较精确。运放电路设计成电压跟随器,该电路具有高输入电阻、低输出电阻的特点,能够实现到A/D模块的阻抗匹配。
同时,通过一个电容将运放的输入端接到运放的输出端形成正反馈,构成二阶压控电压源低通滤波电路。以信标电路为例,在该正反馈电路中,C58使相位超前,C40使相位滞后,只要参数选择合适,可以使整个电路在法f=f0附近带有正反馈且不造成自激振荡。这样,就可使滤波电路在f=f0附近的电压增益提高,使f=f0附近的对数幅频特性曲线接近于理想的水平线。
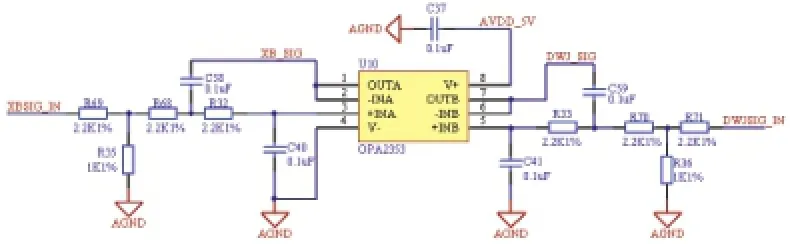
图11 A/D转换调理电路
3.4 俯仰方位电机驱动电路
图12为俯仰方位电机驱动电路,方位电机和俯仰电机的驱动主要由外部驱动器完成,主控板需提供一路开关信号和一路脉冲信号,其中,ARM_AZPWM、ARM_EIPWM 与ARM的PWM模块相连,ARM_AZDIR、ARM_EIDIR连接ARM I/O(输入/输出)口,两路信号均通过光耦隔离输出。
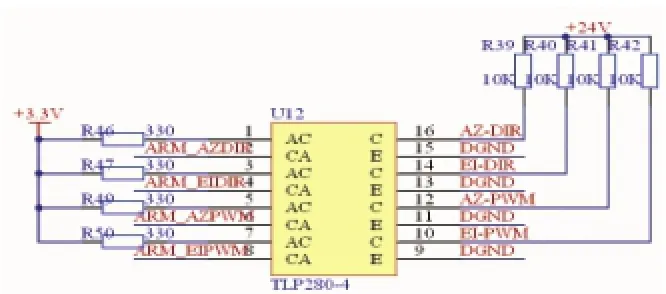
图12 俯仰方位电机驱动电路
3.5 极化电机驱动电路
图13为极化电机驱动电路,采用L298进行驱动,通过参照芯片手册进行外围电路设计,同时布设4个快恢复二极管实现桥式电路,再利用单片机可编程定时器提供脉冲信号,驱动极化电机进行相应动作。

图13 极化电机驱动电路
3.6 Wi-Fi模块
图14为Wi-Fi模块设计电路,Wi-Fi模块选用USRWIFI232-B,使用方便,配置简单,人机界面友好。参照其硬件电路设计要求,设计Reload电路和指示灯电路,并将nlink管脚接到ARM的I/O口,并引出PHY的4个管脚,用于转成以太网接口。
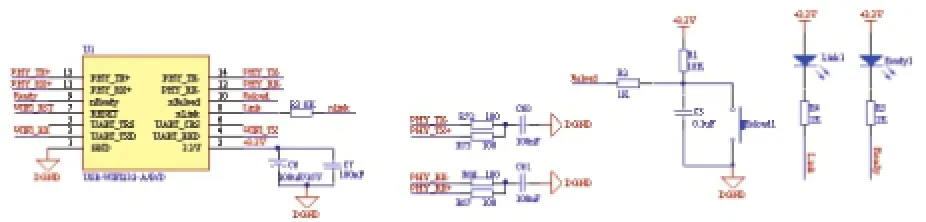
图14 Wi-Fi模块
3.7 GPS模块设计
图15为GPS模块设计。GPS模块采用板上表贴的LEA-5S,应用成熟,外围电路简单易实现,参照技术手册设计电路。
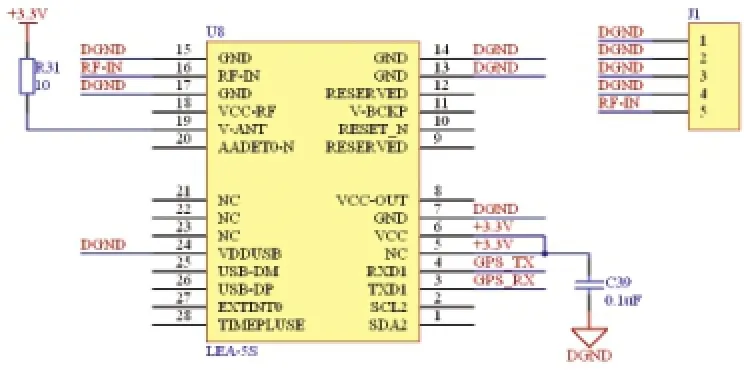
图15 GPS模块
3.8 RS485收发模块
传统的RS485收发模块需要进行系统隔离设计,本电路采用金升阳的RS485隔离收发模块TD301D485H-E,是一款集隔离电源、信号隔离芯片、RS485收发芯片和总线保护器件于一体的RS485协议收发模块。其自带定压隔离电源,可实现2500VDC的电气隔离,并具有ESD保护功能。
考虑到线路的特殊情况(如某台分机的RS485芯片被击穿短路),为防止总线中其它分机的通信受到影响,在RS485信号输出端串联了2个10Ω的电阻R13、R19。这样,本机的硬件故障就不会使整个总线的通信受到影响。在应用系统工程的现场施工中,由于通信载体是双绞线,其特性阻抗为120Ω左右,所以,在线路设计时,在RS485网络传输线的始端和末端各应接1只120Ω的匹配电阻(见图14中的R17),以减少线路上传输信号的反射。
由于RS485芯片的特性,接收器的检测灵敏度为±200mV,即差分输入端VA-VB≥+200mV,输出逻辑1,VA-VB≤-200mV,输出逻辑0;而A、B端电位差的绝对值小于200mV时,输出为不确定。如果在总线上所有发送器被禁止时,接收器输出逻辑0,这会误认为通信帧的起始引起工作不正常。解决这个问题的方法是人为地使A端电位高于B两端电位,这样,RXD的电平在RS485总线不发送期间(总线悬浮时)呈现唯一的高电平,ARM就不会被误中断而收到乱字符。通过在RS485电路的A、B输出端加接上拉、下拉电阻R11、R20,即可很好地解决这个问题。同时,RS485收发器的输出端分别连接稳压管及防雷管进行电路保护,如图16所示。
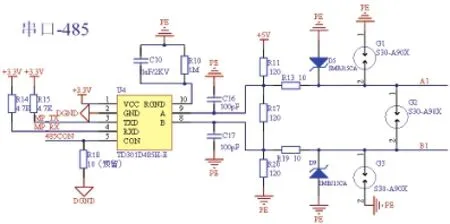
图16 RS485收发模块
3.9 MAX232电平和TTL电平转换
图17为MAX 232电平和TTL电平转换电路,共3路,使用了2个MAX3232芯片,电路成熟,参照设计手册设计即可,其输出加过流过压保护。

图17 232电平和TTL电平转换
3.10 SPI接口设计
SPI接口用于与外围的Tunner模块进行通信,通过ARM自带的SPI模块通过BAT54S进行电压钳位,并通过限流、滤波、ESD、过流保护电路进行保护。电路设计如图18所示。
3.11 限位开关及一键通按钮
限位开关和一键通按钮均直接输入到ARM的GPIO输入引脚,如图19所示,当按钮未按下时,由于电阻的上拉作用(R54~R58),ARM检测到引脚为高电平;当按钮按下时,ARM检测到引脚为低电平。3个限位开关+一键通按钮,并增加了一路输入以作备用。

图19 IO口输入
4 下位机程序设计
天线的控制流程初定为:上电后,天线判断上次断电是否正常,如果上次断电正常,那么,天线转到初始位置(方位0°,俯仰45°,极化0°),如果非正常断电,则天线在上电后保持不动,这主要是考虑到天线在对星完成后遇到突然断电情况,再重新上电后无需再次对星。控制过程中在while循环中使用switch mode进行模式判断,mode=0, break;mode=1,天线转到初始化位置;mode=2,天线对星;mode=3,天线收藏。整体控制流程如图20所示。
5 实 验
通过实际对星试验,验证控制系统的使用效果。实验结果表明,鑫诺5号对星时间为1分40秒以内。静中通天线与7.5m基站语音、视频通信效果良好,语音、视频信号无明显中断现象,接收增益为30dB,发送增益为31dB。图21和图22分别为实验过程图。
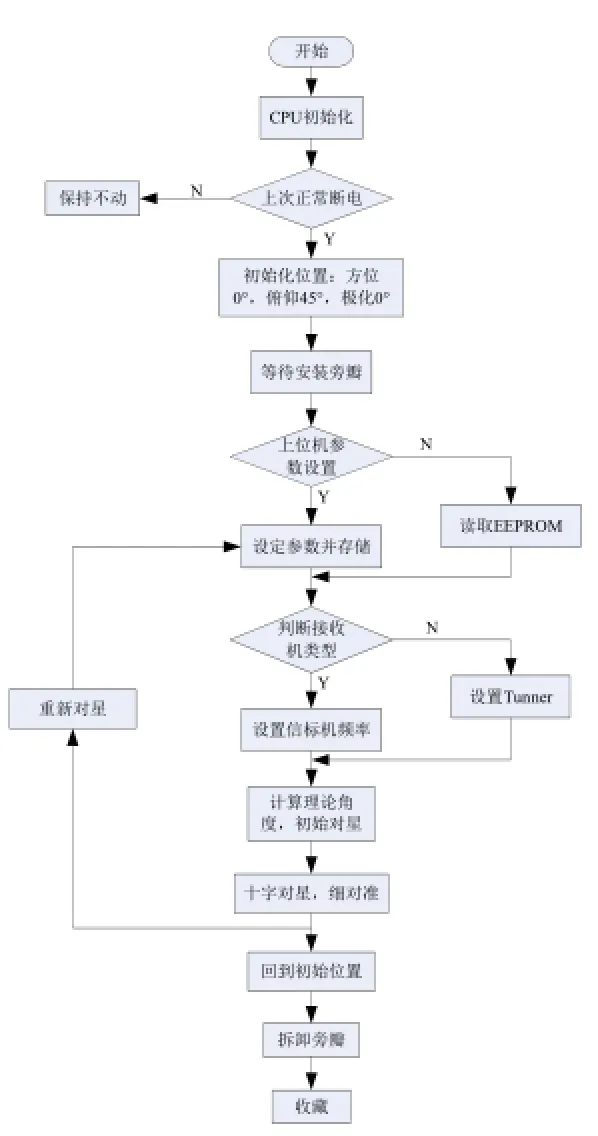
图20 程序流程图
6 结束语
便携式静中通天线控制系统采用模块化设计,便于集成和调试,成本低,控制效果好,能够满足系统使用要求。实际对星实验结果表明,天线与基站通信无明显中断现象,达到了设计要求。
图21 接收极化
图22 接收反极化
1 蒋岳新, 李荣华. 森林防火应急VSAT卫星通信系统应用于管理[J]. 森林防火, 2013, (2): 33~36
2 胡正飞, 谢继东. 便携式卫星通信地球站结构及其控制系统设计[J]. 机电产品开发与创新, 2006, 3(19): 4~6
3 张宇, 秦龙. 基于LM3S615的两相步进电机控制系统[J]. 湖北工业大学学报, 2011, 26(1): 64~65
4 邢攸卿. 一种智能的便携式卫星通信地球站的研究与应用[D]. 南京邮电大学, 2010
5 Stellaris Peripheral Driver Library [M/DK]. Texas Instruments Incorporated, 2011
6 吴红. 基于ARM的便携式卫星通信地球站的研究与设计[D]. 南京邮电大学, 2012
1009-8119(2016)08(1)-0057-04机、电机驱动器供电电压均为24V,OPA2353供电电压为5V,Wi-Fi转以太网口模块供电电压为1.8V,其它供电电压为3.3V。因此,电源模块主要考虑将24V电压转换成12V、5V、3.3V、1.8V。
