基于SolidWorks的3-RPR球面机构的工作空间研究
2016-09-13随磊贺政军山西中北大学湖北红林探控有限公司
随磊 贺政军、山西中北大学 、湖北红林探控有限公司
基于SolidWorks的3-RPR球面机构的工作空间研究
随磊1贺政军2
1、山西中北大学2、湖北红林探控有限公司
本文利用SolidWorks对3-RPR球面并联机构建模,根据该模型对影响该机构工作空间的因素进行分析,然后添加相应的约束和驱动,利用SolidWorks的算例分析功能对机构的运动轨迹进行仿真并记录轨迹数据,最后将得到的数据利用MATLAB编程绘制机构的工作空间三维图。
球面并联机构;工作空间;SolidWorks算例分析;MATLAB
引言
球面并联机构是一种特殊的空间并联机构,在工程上具有重要的应用价值。在宇航、医疗、机械等部门具有广阔的应用前景,如用作机器人的腕、髋、肩关节,卫星定向装置,机械加工的回转工作台[1]与零件定位装置等。球面并联机构的运动特点是:其末端执行器上的所有点都绕着一个固定点做距离不变的转动,即所有点的轨迹都在一个固定的球面上。基于该机构的运动特点,可利用其设计一种特殊的加工机械,用于球面上的加工、雕刻或者加工成球面。工作空间是指机构操作末端执行器或参考点所能达到的工作区域,它的大小是衡量机构性能的重要指标[2]。本文研究3-RPR球面并联机构的工作空间,找出执行机构的工作区域,为机构在工程上的应用提供理论支持。
1 模型建立
一般的空间机构都是由固定平台、动平台(末端执行器)和多个支链构成。本文提出的3-RPR球面并联机构是由1个三角形的固定平台、类似于球面的动平台、3条完全对称的支链组成,用SolidWorks做出的三维模型如图1所示。

图1 机构的模型
该机构的动平台和固定平台全部由低副(转动副、移动副)连接,每条支链上有2个转动副和1个移动副,移动副的轨迹线均是圆弧线,动平台的3个分支也均是圆弧形且在1个球面上对称分布。该机构最大的一个结构特点是各个转动副的轴线交于一点(记为O点),3个运动副轨迹线的圆心重合于一点,且转动副的交点、运动副轨迹线的重合点以及动平台的球心三点重合,如图1所示。该点就是上述的机构末端执行点运动球面的球心,也叫做机构的中心。可以证明,该机构的自由度是3,且3个自由度均是转动自由度[3]。
2 影响工作空间因素的分析
杆长的影响。一般的并联机构都是由支链连接静动平台,杆长都会影响机构的工作空间,本文研究工作空间设定杆长为单位长度。
转动副的转角。由于受到相邻连杆干涉的影响,转动副在转动时一般都有转动范围(能转动360°的转动副称为整转副),其运动范围由并联机构的具体结构决定。对于本文研究的3-RPR球面并联机构,设定与静平台连接的3个转动副为驱动副,基于其结构特点设定转动副的转角范围是(131°,31°)。
连杆之间的干涉。由于连接静动平台的连杆都有一定的长度,因此在机构的运动过程中会产生一定的干涉。该球面机构在建模时选用弧形连杆,一定程度上可以避免连杆的干涉。在进行算例分析时,设定运动副移动的范围是(0~31)。
3 工作空间求解
3.1SolidWorks路径跟踪
利用SolidWorks的算例分析功能[4],给上述的模型加上适当的驱动,对模型的运动轨迹进行跟踪并记录数据点,上面所述的参数添加到模型约束中,加在3个转动副上的驱动分别为 fx=31*sin(time),fx=31*sin(time),fx=31*sin(1.01*time)。该机构的运动过程如图2所示。

图2 机构的运动过程
3.2 MATLAB绘制工作空间图形
在机构的运动过程中,给其足够的时间,直至其运动轨迹开始重复,以保证机构末端执行器能够到达全部的工作空间。在机构运动的过程中记录其运动路径的数据,导出.csv文件,然后转为.txt文本文档。在MATLAB中通过编程调用.txt文档中的数据,绘制出3-RPR球面并联机构。在本文给定的约束条件下的工作空间如图3所示。
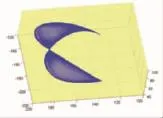
图3 机构的工作空间三维图
4 小结
(1)本文通过运用 SolidWorks和MATLAB软件做3-RPR球面并联机构的工作空间研究,提出一种求空间并联机构工作空间的方法,可与数值法求工作空间相互验证。
(2)通过本文的研究发现,3-RPR球面并联机构的运动轨迹是比较规律的,机构的路径规划相对简单,为机构在工程中的应用提供参考。
[1]曾宪菁,黄田,曾子平.3-RRR型数控回转台的精度分析 [J].机械工程学报,2001,37(11):42-45.
[2]黄真,赵永生,赵铁石.高等空间机构学[M].北京:机械工业出版社,2008.
[3]随磊,李瑞琴,王明亚等.基于螺旋理论的球面并联机构构型分析[J].机械管理开发,2015,30(8):37-39.
[4]李大海,宋胜涛,李瑞琴等.对称型平面3-RRR并联机构可达工作空间研究[J].机械传动,2015,39(9):29-31.
随磊,1991年出生,安徽阜阳人,硕士研究生,研究方向:机械与机构的动态设计与优化。
