3-PUPU并联机器人研究现状及未来憧憬
2016-09-13山西中北大学张斌
山西中北大学 张斌
3-PUPU并联机器人研究现状及未来憧憬
山西中北大学张斌
近年来,随着对微控理论和微动平台研究的不断深入,各种针对性强、工作性能突出的专业机构如雨后春笋般不断涌现。3-PUPU并联机构作为其中之一,由于其工作范围大、微调性能好、保险系数高等优点,逐渐走进研究人员的视野。其运动模型也可以通过具有大工作范围柔性铰链的刚性模型和矢量环方程来建立[1]。通过优化设计,还可以实现其工作空间大、运动性能好等优势的强势结合。
微动平台;工作空间;优化设计;运动性能
1 引言
并联机器人具有结构刚度大,承载能力高,动力响应快,结构紧凑等优点[2]。因而,其在工业生产中应用前景极为广阔,现已作为机构学的一个独立分支,进行专项研究。伴随着工业化进程脚步的加快,灵活度高、专项性能突出、制作简便、应用性能强的并联微动平台得到了前所未有的发展契机。Stewart平台作为其中最具代表性的结构一直受到多方学者的研究学习及再开发。
3-PUPU并联机构就是在Stewart工作平台基础上,针对具体工况要求,研究开发而产生的新构型。该构型由两级驱动完成综合运动,第一级线性驱动部分负责大范围长距离的运动转移,二级驱动系统负责微动控制。这样既能实现较高的运动效率,又能兼顾较精确的工作终端运动线路,达到精确与高效相结合。在精密工程很多应用都需要仔细隔离振动源的仪器,本构型采用主动隔振系统实现了非常低的剩余振动水平,尤其是对于频率非常低的10赫兹的振动信号[3]。该机构针对此种工况,被设计为一种宏/微混合机器人。
2 结构分析
3-PUPU机构的结构如图2、图3所示。它是由前期驱动线性导轨,两级大范围柔性铰链,微调线性导轨组合而成。通过两级驱动的相互配合来完成移动平台实现既定运动的任务。第一级驱动通过三个移动副与机架相连,主要实现的是大范围快速移动。通过万向铰与二级驱动部件连接,二级驱动部件主要实现微动运动,进行精确控制,因而其驱动功率及承载能力会有所限制。最终通过三个大范围柔性铰与工作平台相连。既减少了刚性冲击造成的震动对机构的影响,又能保证驱动机构对工作终端的精准控制,还能兼顾工作平台的工作空间,实现了优势方面的多点融合,保证了该构型的优势竞争力。
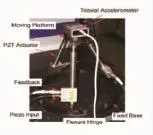
图1 3-PUPU机构的实例图

图2 3-PUPU机构的结构图
3 优缺点分析
3-PUPU并联机构作为一个相对来说针对性较强的构型,有其独特的性质,当然也有其应用范围的限制。首先,我们了解一下它的优点。
(1)安全系数高。3-PUPU机构是一个二级驱动机构,这就给了它较高的安全系数,在某一级驱动发生故障时,其在一定范围内仍有一定的工作能力,从而能继续完成部分任务。
(2)运动效率高。两级驱动各司其职,既有快速移动驱动,又有精准微动驱动,能根据不同的工况做出相应的调整,保证了时间的节约和工作性能达标的兼容。
(3)精确度好。伺服电机驱动,能做到令行禁止。通过微调驱动的精准输出实现工作平台的相应运动,保证了其较高的精确度。
下面我们介绍一下其受限情况。
(1)机构尺寸限制。由于运动链驱动多,二级精准驱动精确性要求较高,现阶段零件材料性能受限,本构型尺寸不宜过大否则可能会由于重力重心等原因导致执行终端稳定性减弱,实际执行端与设计执行端不重合等现象,从而影响其应用性能
(2)工作功率受限。由于伺服电机驱动功率,构型尺寸结构等方面的限制,此构型不适用于承载较大的工作场合。
4 前景展望
随着科学技术的不断进步,材料科学的不断发展,材料性能和零件加工精度的提升,伺服电机的驱动功率也将得到大幅提升,此机构的承载能力和结构尺寸必将取得喜人的改进成果,因而其应用领域也将进一步扩大。同时,由于其效率与工作性能兼顾,工作空间大等优势,其前景必将更为广阔。
[1]Yun,Y(Yun,Yuan)[1];Li,YM(Li,Yangmin)[1].Optimaldesignofa 3-PUPUparallelrobotwithcompliant hinges for micromanipulation in a cubic workspace[J].ROBOTICS AND COMPUTER-INTEGRATEDMANUFACTURING,2011.
[2]车林仙.3-PSS/S三转动并联机器人机构的位置分析[J].机械传动,2008,32 (3):15-18.
[3]Yun,Y(Yun,Y.)[1]Li,Y(Li,Y.)[1,2]. ModelingandControlAnalysiso a3-PUPUDualCompliantParalle ManipulatorforMicroPositioningand Active Vibration Isolation[J].JOURNAL OF DYNAMIC SYSTEMS MEASUREMENT ANDCONTROL-TRANSACTIONS OF THE ASME,2012.
