链式静止同步补偿器的设计与仿真研究
2016-09-10邵燕秋邵宜祥简优宗陈董秀朱菲菲
邵燕秋 邵宜祥 简优宗 陈董秀 朱菲菲
(国网电力科学研究院,南京 211000)
链式静止同步补偿器的设计与仿真研究
邵燕秋 邵宜祥 简优宗 陈董秀 朱菲菲
(国网电力科学研究院,南京 211000)
分析了链式静止同步补偿器的主电路拓扑结构和功率单元结构,阐述了双极性PWM调制方法和载波移相角的选取,采用恒无功控制理论搭建了基于 PI控制的控制电路,并且给出了PSCAD|EMTDC仿真结果。仿真结果说明了系统设计的合理性和可靠性,也说明了STATCOM作为新一代FACTS装置具有良好的性能。
链式静止同步补偿器;PWM调制;载波移相角;控制电路
静止无功补偿器是第三代 FACTS技术发展的产物,是提高电力系统电能质量的重要设备之一。链式静止无功补偿器(STATCOM)具有调节系统无功功率和接入点电压的能力,并且具有运行范围广、响应速度快、控制策略灵活、装置损耗低等优点。
早期的 STATCOM,使用的开关器件是开关频率较低的门极可关断晶闸管GTO,主电路一般采用单相桥结构或三相桥结构,并且控制策略比较落后,存在谐波含量高、补偿延时、补偿容量低等问题。随着电力电子技术的快速发展,STATCOM实现了跨越式的发展,在大容量STATCOM的研究中,链式结构的STATCOM是各国研究的热点[1-4]。
STATCOM 的应用可以缓解电力系统对动态无功功率的需求,增强电网的稳定性、灵活性和可靠性,对保证电网节能、高效、稳定运行具有重要的意义。对STATCOM的研究,不仅可以提升在电力系统柔性交流输电方面的科研水平,而且能够提升用户侧电能质量[5]。
1 主电路拓扑结构
链式STATCOM的核心部分是链式结构的逆变器。它的每一相都是由若干个结构相同而输出电压不同的单相H桥逆变器串联而成,每个单相H桥逆变器并联一个独立的直流电容器,通过控制开关器件的导通与关断,每个H桥逆变器都可以产生多种类型的电平电压,将串联的H桥逆变器的输出电压叠加起来,就构成了逆变器的最终输出电压[6]。
从电路拓扑结构来讲,对三相链式 STATCOM而言,有星形联接和三角形联接两种联接型式。对相同的电压等级和容量等级而言,采用星形联接时阀组承受的电压较小,且在工程实践中,星型联接的占地面积通常略小。所以本次仿真采用的是三相换流链按星形连接后,通过连接电抗器接入 10kV电网,并且中性点不接地。其主电路拓扑结构如图1所示。
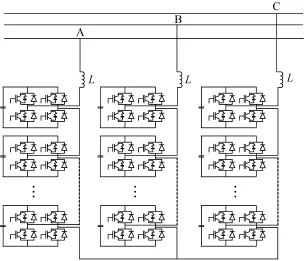
图1 链式STATCOM主电路拓扑结构
2 系统设计
2.1双极性PWM调制
在链式STATCOM的设计中,开关器件为绝缘栅双极晶体管 IGBT,对其通断控制采用载波型PWM控制技术。载波型PWM控制根据载波的不同,分为单极性PWM控制和双极性PWM控制。由于双极性PWM调制原理简单,实现起来相对容易,并且与单极性PWM调制的结果无本质区别,故工程中链式STATCOM一般采用双极性PWM调制方法。
每个H桥逆变器为一个功率单元,设每个功率单元的直流电压为Ud,采用传统的双极性PWM调制得到的输出电压波形只有Ud和-Ud两种电平,因此级联输出电压阶梯波数量较少[7]。为了使级联后输出电压阶梯波数量增加,必须使每个功率单元的输出电压电平数增加[8-10],为此本文采用了改进的双极性PWM调制技术。
在改进的双极性PWM调制技术中,任一功率单元的PWM脉冲均有一个正弦调制波tiao和一对反相的三角载波tri1和tri2比较产生。正弦调制波的频率为工频50Hz,三角载波的频率为1050Hz。
功率单元的结构以及各开关器件的编号如图 2所示。
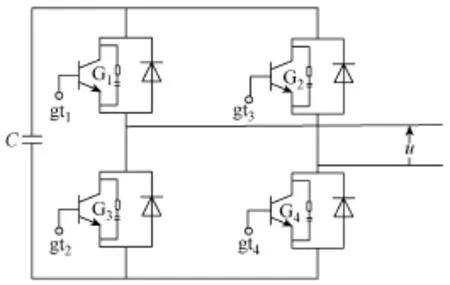
图2 功率单元结构和开关器件编号
调制波 tiao与三角载波 tri1比较,得到开关信号 gt1和 gt2,控制功率单元左半桥臂上下两个开关器件G1和G2的导通与关断。调制波tiao与三角载波tri2比较,得到开关信号gt3和gt4,控制功率单元右半桥臂上下两个开关器件G3和G4的导通与关断。其具体的控制方法见表1。
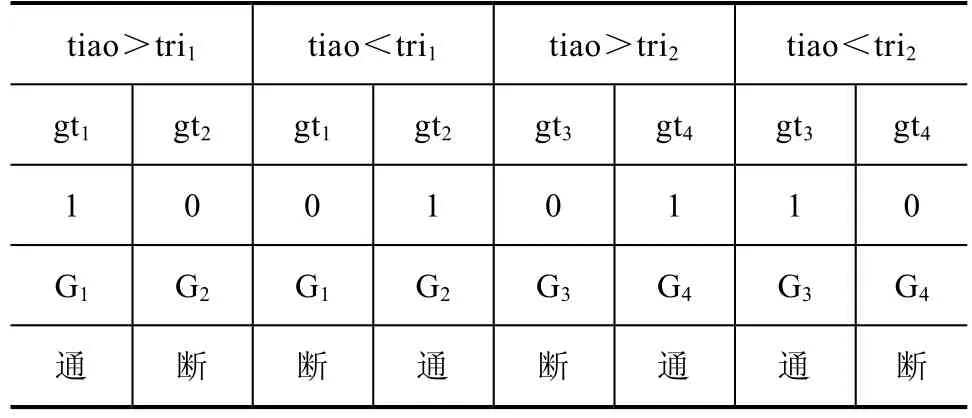
表1 双极性PWM调制方法
由改进的双极性PWM调制方法得到的功率单元输出电压波形如图3所示。
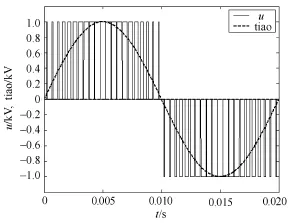
图3 功率单元输出电压波形
由图3可以看出,通过改进的双极性PWM技术得到的单个功率单元的输出电压中含有 Ud、0、-Ud三种电平,并且其波形与正弦波之间满足面积等效原理。
2.2载波移相角的选取
载波移相角cθ与每相串联的功率单元个数N有关。关于载波移相角的选取,传统的方法是采用全波移相方式,全波移相方式的移相角的计算公式为本文链式STATCOM每相采用8个功率单元串联,若采用全波移相方式,则移相角为45°。
采用全波移相方式并将8个功率单元的输出电压串联起来即得到一相的输出电压,其波形如图 4所示。
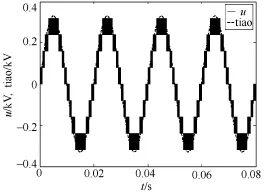
图4 全波移相方式时一相输出电压波形
由图4可以看出,采用全波移相方式得到的一相输出电压波形中含有9种电平电压,即输出电平种类为N+1。
设功率单元的编号为 H1—H8,全波移相方式中,8个功率单元对应的载波角度见表2。

表2 全波移相方式载波角度
从表2中可以看出,H1与H5、H2与H6、H3与H7、H4与 H8是完全等效的,此时相当于只有 4个功率单元串联,极大地浪费了开关器件。
因此,需要对全波移相方式进行优化,优化的方法是采用半波移相方式,在半波移相方式中,载波移相角此时8个功率单元对应的载波角度见表3。
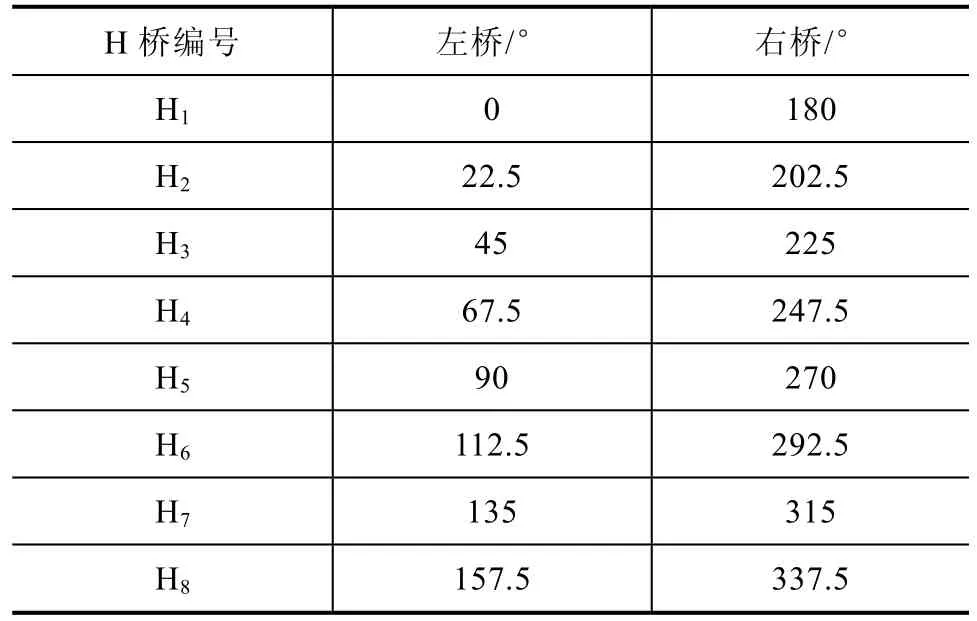
表3 半波移相方式载波角度
从表3可以看出,采用半波移相方式时,任意两个功率单元之间都不存在等效关系,因此不会浪费开关器件。
采用半波移相方式时,一相输出电压波形如图5所示。
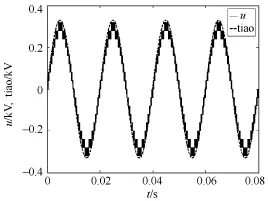
图5 半波移相方式时一相输出电压波形
由图5可以看出,采用半波移相方式得到的一相输出电压波形中含有17种电平电压,即输出电平种类为2N+1,并且输出电压的波形与正弦波相比,已经非常接近。
此时,一相输出电压波形中含有17种电平,而全波移相方式中,每相只含有9种电平。半波移相方式的输出电压电平数明显增加,并且波形更加接近正弦波。
从上面的分析中还可以看出,若链式STATCOM中每相功率单元的个数N为奇数,则不论采用全波移相方式还是半波移相方式,都不会出现某两个功率单元输出电压等效的情况,全波移相方式和半波移相方式没有区别。仅当每相功率单元的个数N为偶数时,采用半波移相方式才明显优于全波移相方式。
2.3控制电路
STATCOM 的控制方式主要有三种:手动开环控制方式、恒无功闭环控制方式和恒电压闭环控制方式[11-12]。在本次STATCOM的仿真中,因为考虑到要实时补偿负载所需的无功功率,因此采用恒无功控制方式,只不过这里的恒无功不是真正意义上的无功功率保持不变,而是实时采集负载所需的无功功率,作为控制电路中无功信号的给定值。
设电网电压与STATCOM输出电压之间的夹角为δ。STATCOM控制器采用δ控制法控制其输出的无功功率,控制方法采用传统的PI控制方法和逆系统控制方法。
PI控制中对δ的控制采用如下算法:

式中, δΔ为δ的调整量,单位为(°);S为拉普拉斯算子;QΔ即无功功率参考值与实际值之差。其中,K1为积分时间常数,K2为比例系数。
逆系统PI控制对δ采用逆PI控制算法,算式如下:

恒无功逆系统PI控制的控制算法框图如图6所示。
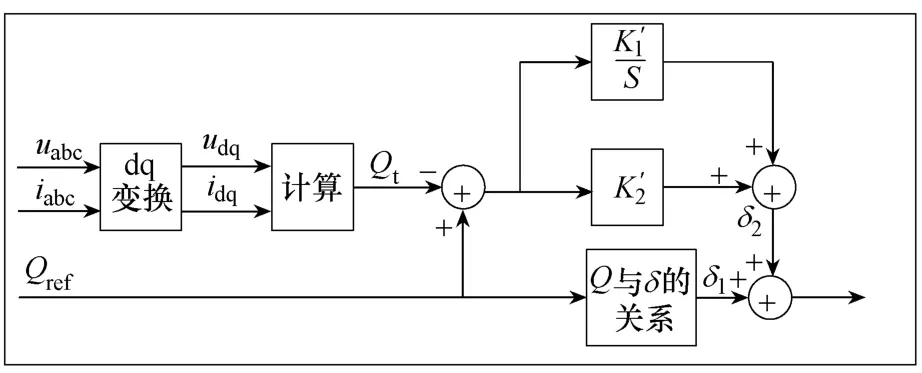
图6 恒无功方式下逆系统PI控制算法框图
3 仿真结果
前述已经建立了八级H桥STATCOM的仿真模型,并且分析了调试原理,该部分对链式STATCOM模型进行仿真并给出相应的仿真结果。
以A相为例,在八级H桥STATCOM未投入电网时,电网的电压电流波形如图7所示。
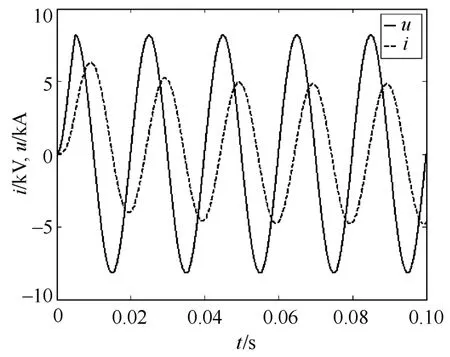
图7 STATCOM投入之前A相电压、电流波形
在t=0.3s时,将链式STATCOM投入电网,此时电网A相电压电流波形如图8所示。
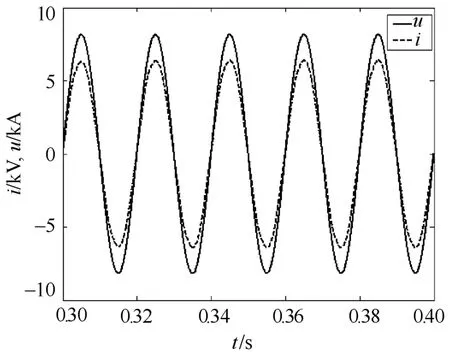
图8 STATCOM投入之后A相电压、电流波形
对比图7和图8可以看出:在链式STATCOM投入之前,电网的电压电流相位差比较大,链式STATCOM 投入之后,电网的电压电流相位基本一致。
图9给出了链式STATCOM接入电网前后电网的功率因数变化情况。
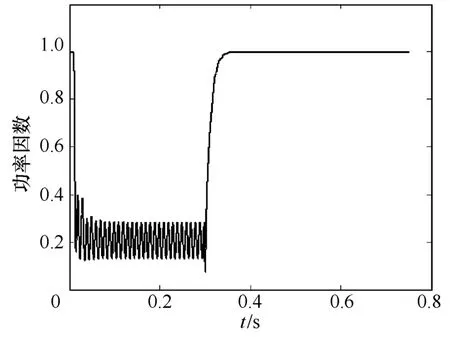
图9 链式STATCOM投入前后电网功率因数对比
由图9可以看出,STATCOM投入之前,电网的功率因数大约为0.2,投入之后的功率因数近似为1,并且补偿的过渡时间较短,说明STATCOM动态无功补偿效果较好。
4 结论
本文分析了八级链式STATCOM的主电路拓扑结构和功率单元结构,并且通过PSCAD|EMTDC仿真,分析了全波移相方式和半波移相方式的异同点,最后给出了控制系统的设计方法和仿真结果。本文对链式STATCOM的研究是对以往文献的补充,并且为后续试验平台的搭建奠定了基础。
[1] 王轩, 林嘉扬, 滕乐天, 等. d-q-0坐标系下链式STATCOM 电流控制策略[J]. 中国电机工程学报,2012, 32(15): 48-54.
[2] 钱叶册, 时国平, 钱叶旺. 三相四桥臂STATCOM的研究[J]. 自动化与仪器仪表, 2012(4): 36-37, 40.
[3] 丁留宝. 基于 DSP的 STATCOM的研究与设计[D].南京: 南京理工大学, 2008.
[4] 丁理杰, 杜新伟, 周惟婧. SVC与STATCOM在大容量输电通道上的应用比较[J]. 电力系统保护与控制,2010(24): 77-81, 87.
[5] HASON D J, HORWILL C, GEMMELL B D, et al. A STATCOM-based relocatable SVC project in the UK for national grid[C]//Winter Meeting of the IEEEPower-Engineering-Society. New York, 2002: 532-537.
[6] 王伟. 基于IGCT的静止同步补偿器(STATCOM)主电路的研究[D]. 镇江: 江苏大学, 2007.
[7] 何大清. H桥串联型静止无功发生器(SVG)研究[D].长沙: 中南大学, 2006.
[8] 祝军. 10kV 5Mvar链式STATCOM装置的研发[D].哈尔滨: 哈尔滨理工大学, 2013.
[9] Akagi H. Classification terminology and application of the modular multilevel cascade converter (MMCC)[C]// The 2010 International Power Electronics Conference,2010: 508-515.
[10] 宫力. 级联H-桥多电平STATCOM关键技术研究[D].武汉: 华中科技大学, 2012.
[11] Peng F Z, Wang J. A universal STATCOM with delta-connected cascade multilevel inverter[C]//PESC 04: 2004 IEEE 35th annual power electronics specialists conference, VOLS 1-6, CONFERENCE PROCEEDINGS, 2004: 3529-3533.
[12] 罗承廉, 纪勇. 静止同步补偿器的原理与实现[M].北京: 中国电力出版社, 2005.
Design and Simulation Study on Cascade Static Synchronous Compensator
Shao Yanqiu Shao Yixiang Jian Youzong Chen Dongxiu Zhu Feifei
(State Grid Electric Power Research Institute, Nanjing 211000)
This paper analyzed the main circuit topology and power unit structure of the cascade static synchronous compensator. This paper analyzed the bipolar PWM modulation method and how to select the carrier phase-shifting angle, then constructed the control circuit according to the constant reactive power control theory based on PI control and presented the PSCAD/EMTDC simulation results. The simulation results validated the rationality and reliability of the system, and proved that STATCOM as a new generation of FACTS device has a good performance.
cascade static synchronous compensator; PWM modulation; carrier phase-shifting angle; control circuit
邵燕秋(1987-),女,硕士研究生,主要研究方向为静止无功补偿器和静止变频启动器。
