非织造汽车内饰件智能机器人水切割系统研制
2016-09-10施云高冯宝林吕仙阳成士华
杨 慧,施云高,冯宝林,吕仙阳,成士华
(1.常州先进制造技术研究所,江苏常州213164;2.中国科学院合肥物质科学研究院,安徽合肥230031;3.安徽红星机电科技股份有限公司,安徽合肥231135)
非织造汽车内饰件智能机器人水切割系统研制
杨慧1,施云高1,冯宝林2,吕仙阳3,成士华3
(1.常州先进制造技术研究所,江苏常州213164;2.中国科学院合肥物质科学研究院,安徽合肥230031;3.安徽红星机电科技股份有限公司,安徽合肥231135)
非织造材料汽车内饰件由局部平面和不规则的空间曲面组合而构成,在不同的平面和曲面上有定位孔、安装孔的精准切割需求。机器人水切割系统采用6轴机械臂驱动400MPa的超高压射流水刀切割内饰件,集中除尘、废水集中回收;内饰件参数采用数字化录入系统,切割参数一致、轨迹精准、作业效率高,可以满足汽车行业批量化,高效率的要求。
非织造材料;汽车内饰件;机器人;水切割
汽车工业的快速发展促进了汽车内饰材料生产技术水平的提高,非织造材料的汽车内饰零件已超过40种,包括声、热绝缘材料、结构件以及模压成型的非织造门内饰、行李舱盖板、车顶、车厢衬垫、座椅靠背等装饰件,生产一辆轿车已需20 m2非织造材料(约15~20 kg),而且用量还在继续增加。非织造材料所用的纤维[1](包括聚酯纤维、聚丙烯纤维、玻璃纤维、碳纤维和天然纤维)在加工过程中会产生大量的纤维粉尘,严重的影响工人的身心健康;材料的各向异性的特点也影响了工件的加工质量和参数一致性,汽车内饰件生产技术需要突破。
1.系统规划与布局
为了满足生产工艺和生产效率要求,机器人水切割系统主要功能模块包括:六轴工业机器人、水切割系统、双工位工装与定位系统、废水废渣收集系统、真空吸尘系统、工件数据输入系统、信号检测和控制系统。空间布局如图1所示,在工作室内,双工位工装满足生产定位和交替上下料的工作需求,根据工件的设计基准和位姿关系将工件安装在定位工装上;水刀固定于机器人第六轴末端,机器人根据工件的空间曲线和曲面关系进行动态响应,执行工件的精准切割,满足不同工件曲面和曲线的生产切割需求;真空吸附系统对切割产生的非织造材料的飞尘进行吸附收集,废水废渣回收系统对废水和切割下的废料进行收集,避免乱排乱放而引起的环境污染;传感及控制系统对生产过程的中的工件位姿和人员是否在操控区间进行检测,确保工件的生产质量和操作人员的人身安全。

图1 机器人水切割系统空间布置图
2 水切割系统设计
2.1水切割系统规划
高压水射流切割是利用水或水中添加剂的液体经水泵至增压器再经储液蓄能器使高压液体流动平稳,最后由人造宝石喷嘴形成300~900米/秒的高速液体流,喷射到工件表面,到达去除材料的加工目的,水喷射加工系统构成如图2所示,其构成包括:供水器、过滤器、高压泵、增压器、蓄能器、控制器、液压装置、阀、喷嘴等。
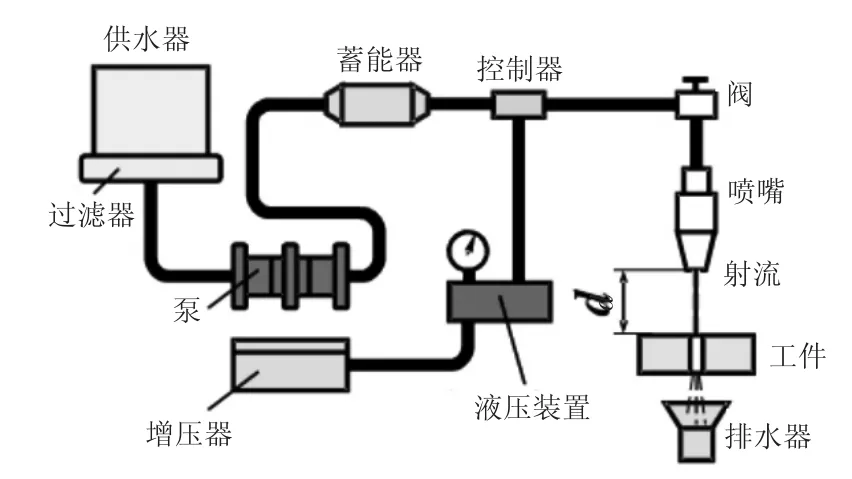
图2 水喷射加工系统示意图
2.2射流水动力计算
图3为非淹没连续自由射流的水动力学结构,它是由射流初始段和主体段构成[2]。初始段包括等速核和混合区,而主体段则为棍合区。混合区是由不同速度的异种流体介质—水和空气混合而成。可见,只有等速核是单一的水介质,而且淹没和消失在混合介质之中。等速核是能量密集的主流,混合介质则通过动量交换,从等速核获得动能,而且占据射流的主要部分,二者都具有对靶体材料冲击加载的破坏作用,而等速核动能更大,是切割最有效的射程区段,因而,切割靶距通常选在这个范围内。图4是射流在靶体表面的流动图形,区段Ⅰ是射流上游,即喷嘴内部的流动;区段Ⅱ是图所表示的射流段区段则是射流与靶面接触后的状态。
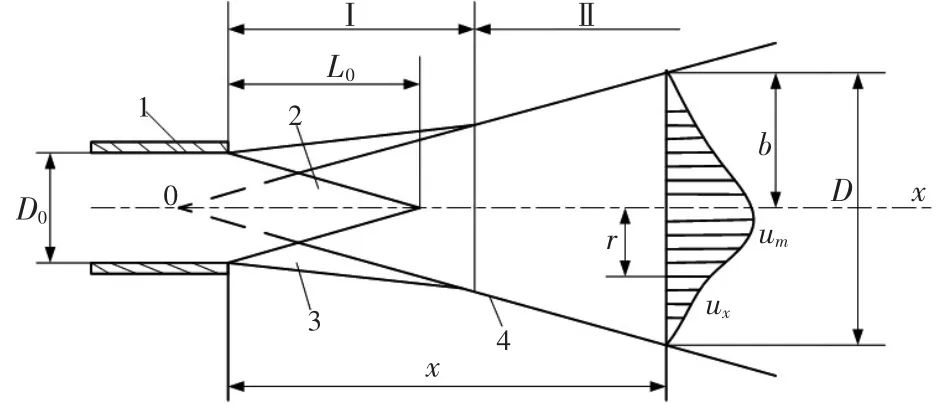
图3 射流的水动力结构
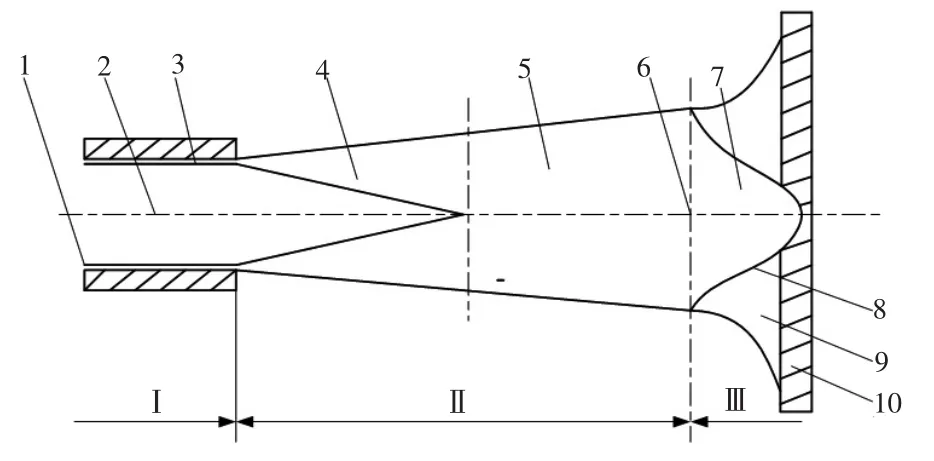
图4 射流在靶体表面的流动图形
几何特性:
(1)初始段长度(近似取等速核长度)L0:L0≈(53~106)D0,式中:D0为喷嘴直径;L0与雷诺数有关。
动力学特性
(3)喷嘴出口平均速度v0:v0=φ(2P0/ρ)1/2,式中:φ为流速系数,约0.97;ρ为介质密度;P0为喷嘴入口压强。
(5)轴心动压Pm:Pm=P0(L0/x)0.27+0.0075(x/L0)2.
(6)平均动压PA:PA=1.14P0(D0/x)0.105
(7)射流的最大打击力Fm(扩散角弯曲处):
(8)射流基本段内的打击力F:F=Fm[1.046-3× 10-4(x/D0/)].
(9)轴向速度分布(见图1):ux/um=(1+r2/ 0.016 x2)-2(淹没射流)
(10)轴心最大速度um:um/u0=1.85[1+0.14(x/ D0)]-1(淹没射流)式中:u0为喷嘴出口速度。
(11)射流功率N:N=P·Q式中:Q为喷嘴流量。
3 机器人选型与参数输入系统
3.1机器人选型
汽车顶棚形状比较复杂,由不规则的空间曲线和曲面构成,并且在工件上往往有多个开孔,开孔形状和孔的分布也不规则。为了适应于水切割高湿度的现场高湿度的环境要求,选用ABBIR1400六轴防水机器人进行水切割,可以满足不同的空间型位切割要求。
3.2汽车内饰件三维重建
在已有汽车内饰件的基础上重建三维数字化模型,对内饰件关键尺寸和工位进行基准设计与界定,综合采用三维扫描、数值拟合、模型重建、数值优化等方法构建已有内饰件的三维数字化模型,构建成机器人可操作的参量化的数字化模型,便于机器人生成轨迹与切割。
3.3基于三维重建的机器人切割轨迹规划
射流水必须时刻垂直于切割工位的表面,根据非织造材料的材料特性,建立切割系统的运动仿真模型,运用计算机建模仿真技术对高压水系统的资源进行设计与规划,在充分考虑有效切割不留飞边和毛刺前提下,动态的模拟切割水压与射流对效率的影响,借鉴三维数字化模型生成切割工位的线与面的法线或法面,找出系统方案可能存在的问题,通过修改和调整参数、反复运算,对不同工位进行轨迹规划,利用干涉分析方法对整个生产线运动部件的执行顺序以及运动轨迹进行优化,进而提高生产节拍。
4 控制系统
4.1控制系统设计
系统选用PLC为总控制器,对水切割机器人、高压泵、真空吸附系统、冷水机、软水机和排水系统进行控制。通过光电检测单元和防碰撞传感器,建立反馈控制,实现水切割轨迹精确定位。控制系统配置液晶触摸屏作为人机交互界面,可以方便快捷地选择控制模式、设置和修改各设备控制参数、监测系统运行状态、实时显示系统故障,系统框图如图5所示。

图5 控制系统框图
4.2故障与安全
故障处理与安全系统至关重要,防范措施如下:
(1)系统运行前,进行设备自检并初始化(如图6),设备回归原始状态,准备执行相应的工艺。
(2)生产线故障处理系统实时监测高压泵、机器人、冷水系统装置、软水处理装置、废水处理系统装置、定位及滑动工作台等设备的工作状态,发现故障及时做出响应,发出报警信号,使出现故障的设备及前面正在运行工序都停止,以供工程师查询,后续工位完成本次操作后,停止等待下次启动;
(3)生产线设有安全门、安全护栏等检测、保护措施,只有在所有安全门关闭的情况下,整个系统才能正常运行,以避免操作人员误入运行现场,造成伤害;
(4)故障处理系统同样对机器人移动是否到位及水压进行检测,若未到位或水压不够则发出报警信号(如图6、图7所示);
(5)机器人与高压泵等其他装置设备之间动作互锁以保证设备安全运行。
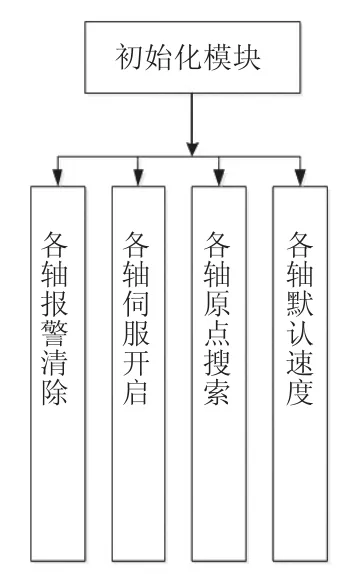
图6 初始化模块
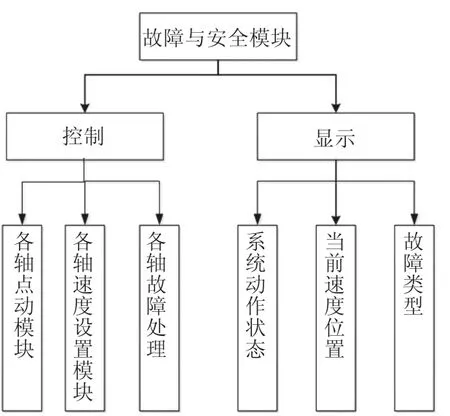
图7 故障与安全模块
4.3生产现场
生产现场如图8所示,根据工件的尺寸范围和非织造材料力学性能,系统最终选用了ABB-IR400机器人和KMT高压泵-50HP高压水系统;最大切割速度可达200mm/sec,切缝约0.2mm;通过真空吸附系统的吸附,切割时粉尘得到了有效控制,切割水经过过滤即可排放。
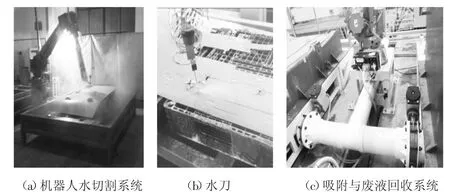
图8 工作现场图
5 结束语
根据某公司非织造汽车内饰件的的现场工艺要求,研究设计了非织造汽车内饰件智能机器人水切割系统。通过系统的智能设计与参数智能输入,规划了机械手的运动空间和运行轨迹,最大切割速度可达200 mm/sec,切缝只有0.2 mm左右,切割过程安全、环保、智能,能有效保障操作人员的安全,特别能适合于自动化流水切割,是非织造汽车内饰件生产技术的一次有效提升和改进。
[1]张运棋.高压水射流切割原理及其应用[J].武汉工业大学学报,1994,16(4):13-16
[2]朱派龙,周锦进,范晓光,等.高压水射流切割技术原理及其应用前景[J].电加工,1997,(6):1-3.
IntelligentRobot System Developmentof Nonwoven Automotive InteriorWater Cut
YANG Hui1,SHIYun-gao1,FENG Bao-lin2,LV Xian-yang3,CHENG Shi-hua3
(1.Institute of advanced manufacturing technology,Changzhou Jiangsu 213164,China;2.Chinese Academy of Sciences,Hefei Institute ofmaterials science,Hefei Anhui 230031,China;3.Anhui Red Star Mechanical&Electrical Polytron Technologies Inc,Hefei Anhui231135,China)
The automotive inner decoration which is in material of nonwoven is a combination of plane and irregular space surface.There is precise cutting demand of positioning hole and mounting holes in different planes and surfaces.6-axis robotic arm is used in the water cutting system to drive ultrahigh-pressure water cutter with pressure of 400 MPa to cut the inner decoration.The robot centralized the function of dedusting and wastewater recycling.As the parameters of inner decoration is recorded by digital input system,the robot has the same cutting parameters and can guarantee precise jectory and work efficiency which can meet the requirements of the mass production and high efficiency of automotive industry.
non-woven material;car inner decoration;robots;water cut
TP27
A
1672-545X(2016)05-0243-04
2016-02-03
国家自然科学基金No.51275505和江苏省产学研合作项目(非织造汽车内饰件机器人水切割系统研制)资助。
杨慧(1960-),男,江苏常州人,高级工程师,本科,主要从事于智能自动化装备方向的研究工作;冯宝林(1972-),男,博士,副研究员,主要从事于机构设计、系统规划与非标系统设计等。