一种重型卡车驾驶训练模拟器的设计与开发
2016-09-10申金星
郑 铮,冯 柯,王 朴,申金星
(解放军理工大学野战工程学院,江苏南京210007)
一种重型卡车驾驶训练模拟器的设计与开发
郑铮,冯柯,王朴,申金星
(解放军理工大学野战工程学院,江苏南京210007)
随着仿真技术的进步,驾驶训练模拟器在驾驶培训中能够发挥更加重要的作用。主要完成了驾驶训练模拟器的整体设计、操纵机构设计、基于CAN总线的数据采集系统设计和软件系统设计。驾驶训练模拟器基于半实物仿真技术和虚拟现实技术,模拟了卡车驾驶的全过程,给受训人员提供了一个逼真的操纵环境和视觉场景,能够达到提高驾驶训练水平的目的。
训练模拟器;操控机构;CAN;视景仿真
随着国民经济的飞速发展和部队遂行任务日趋多样化,对重型卡车及卡车驾驶人员的需求越来越大。以重庆某公司生产的底盘车为例,其已经广泛应用于粉粒物料运输车、混凝土搅拌车、军用特种车、油罐车、自卸车、危化品运输车等工程车辆上。这些重型车特别是军用特种车辆、危化品运输车等对其驾驶员的技术要求很高,通过专用的驾驶模拟训练器对驾驶员进行驾驶训练,可以降低实车训练安全风险、节约培训经费、提高培训效益。
驾驶模拟器可以完成驾驶训练中的所有科目和内容,有利于驾驶培训的正规化、科学化和规范化,并具有节能、安全、经济、全天候和培训效率高等优点[1]。本文针对重庆某公司生产的军民两用型重型卡车进行了研究,设计开发了该型卡车的驾驶训练模拟器,解决了特种车辆驾驶训练难以有效开展的问题。
1 总体设计
驾驶训练模拟器主要由操纵模拟机构、显示仪表、信号数据采集系统和视景软件组成,如图1所示。该驾驶训练模拟器的工作原理是:在固定的台架中,布置与实车完全一致的驾驶操纵机构,为学员提供一个逼真的操作环境。在驾驶席位正前方的液晶显示器上,显示视景计算机生成的动态交通场景。学员坐在驾驶座椅上,通过方向盘及各种操纵机构发出操纵指令,经由调理电路后,通过CAN总线传输给视景计算机,实现模拟驾驶训练。视景计算机中的软件系统根据视景模型中车辆的实时车况,包括加速度、速度、油温和气压等信号一并发送给虚拟仪表盘,虚拟仪表盘采用LabVIEW语言进行开发,学员可以通过虚拟仪表盘了解车辆的性能、动态,从而做出相应的判断。
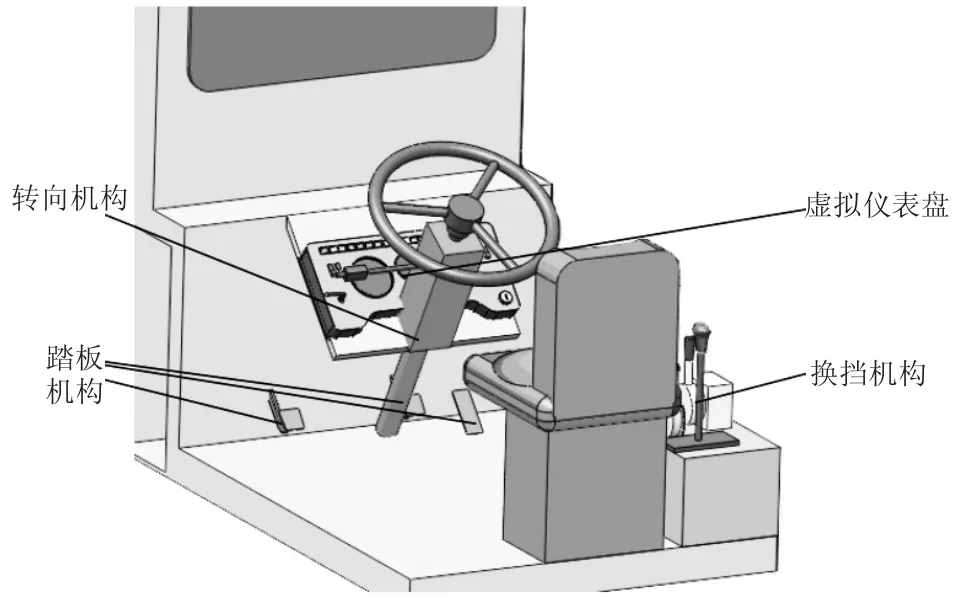
图1 驾驶席总体布局
2 操纵机构设计
驾驶系统操纵机构主要包括了方向盘、变速档、离合器、刹车、油门以及其他的翘板开关等。其中方向盘、踏板机构、换挡机构是操纵机构设计的重点,其逼真程度直接影响到模拟器的训练效果。
2.1模拟方向盘设计
操控系统通过检测方向盘的转动信号,实现行驶转向。转向机构在方向盘中心轴加工传动螺纹,带动磁钢上下移动,将方向盘的转动信号转化为磁钢的直线位移信号,提高了系统测量精度。实车方向盘双向转动角度不超过900°,转向机构采用齿轮齿条与限位块控制方向盘的转角范围,将AH49E高精度线性霍尔传感器成对安装于滑块两端,构成差分检测,以信号幅值之差作为输出,驱动虚拟视景中布雷车的转向动作,进一步提高了测量精度与灵敏度。转向机构原理如图2所示。

图2 转向机构原理图
AH49E线性霍尔传感器内部集成了电压发生器、电压调整器、射极跟随器和线性放大器,根据输入磁感应强度,输出与磁场强度成正比的连续电压信号,具有精度高,体积小,线性度、灵敏性以及可靠性高的优点。其电特性,见表1.

表1 AH49E线性霍尔传感器电特性(TA=25℃,1m T=10Gs)
2.2踏板机构设计
油门踏板、制动踏板与离合器踏板的输出信号为连续变化的模拟量。踏板机构利用WDD35-D导电塑料角度传感器采集转动信号,将踏板的转动量转换为角度传感器的输出信号。踏板与一个扇形齿弧固定连接,齿弧与角度传感器转轴啮合,放大了转轴的转动角度,提高了信号检测精度,踏板安装在同一根转动轴上,利用回位弹簧产生反馈力。以油门踏板为例,根据实车测量结果,其行程约为37°,在踏板扇形齿弧侧面加工导向槽,由固定在机架上的限位销限制其行程。如图3所示。

图3 踏板机构结构图
WDD35-D角度传感器本质上是一个可调电阻,其阻值随着中心轴的的转动而改变。数据采集系统提供+5 V的供电电压,分压后的输出信号与中心轴转动角度呈线性关系,根据电压大小可以计算踏板机构的转动角度[2-3]。其电特性,见表2.

表2 WDD35-D角度传感器电特性
2.3换挡机构设计
该型特种车辆具有八个前进挡,一个爬坡挡,一个倒退挡,换挡机构要为操纵杆提供十个驻留位置,当操纵杆到达某一挡位时产生一定闭锁力,阻止其继续前进;在换挡过程中还要有一定反馈力,使其产生回位的趋势。换挡机构操纵杆端部内嵌了钢珠和弹性体,正常情况下钢珠被弹性体压紧并卡在导向凹槽内,满足了闭锁力要求;前后换挡时,与操纵杆相连接的两个弹簧分别压缩与拉紧,提供回位的反馈力。
换挡机构将十个OH137开关型霍尔传感器布置于各挡位区间,分别检测换挡手柄端部的磁场信号,确定当前的挡位状态,若每一个传感器均无信号变化,则判定换挡手柄置于空挡。其电特性,见表3.
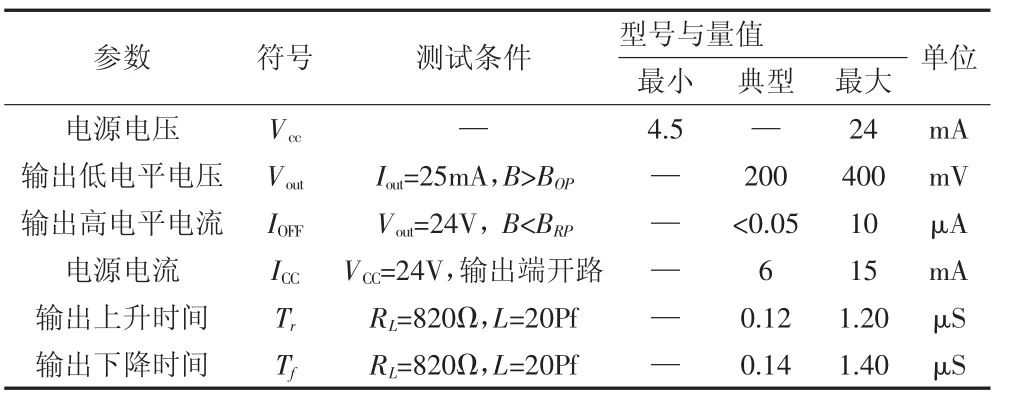
表3 OH137开关型霍尔传感器电特性(TA=25℃)
OH137霍尔开关传感器由反压保护器、电压调整器、电压发生器、施密特触发器、差分放大器以及集电极开路输出级组成,拥有较大的工作范围,可在4.5~24 V内正常工作,将磁场信号转换为阶跃输出信号。无外部磁场激励的情况下,电路输出高电平,当换挡机构切换到某一挡位时,嵌在手柄端部的圆柱形磁钢逐渐靠近电路板上的传感器,磁场强度逐渐上升至BOP,传感器输出低电平;磁钢远离传感器过程中,当磁场减弱至BRP时,传感器信号恢复高电平;如果换挡手柄处于某一位置不变,传感器将输出持续的低电平。单排挡位检测电路如图4所示。OH137磁电转换特性如图5所示。

图4 单排挡位检测电路

图5 OH137磁电转换特性图
3 基于CAN总线的数据采集系统设计
3.1数据采集系统硬件设计
模拟训练系统操作特性的逼真度取决于两个方面:一是正确选择传感器,将其精确安装,减少偏心、间隙以及定位误差,保证传感器检测精度;二是开发高精度的数据采集系统,对传感器输出信号进行整流、滤波与降噪处理,还原真实、准确的操纵信息[4]。
该重型卡车驾驶训练模拟器数据采集系统各部件的微处理器、CAN控制器、CAN收发器以及相应的调理电路组成。系统根据信号类型选用相应的传感器检测操纵部件的动作,将位置、速度、加速度等物理量转换为电信号,并经过调理电路、A/D转换电路、CAN通信接口,由微处理器识别、采集,通过CAN总线发送相应的信号,以驱动虚拟三维场景,实现驾驶场景的输出,其组成包括模拟操作部件—传感器—调理电路—节点微处理器(MCU)—CAN控制器—CAN收发器—CAN总线,采集各路数字量、模拟量输入信号。数据采集系统结构如图6所示。
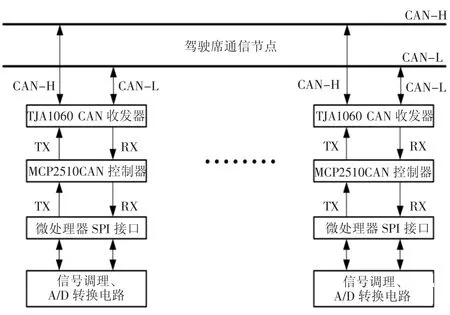
图6 CAN通信原理图
数据采集任务表如表4所示。

表4 数据采集任务表
3.2数据通信协议设计
根据系统总线的通信需求与控制策略,统计网络节点的数目与类型;根据系统设计需求,明确所有通信节点的信号通道数、数据类型、字节长度及其传输速率;根据节点数目与数据特点,确定报文帧类型以及标识符分配方案,包括报文优先级的定义、报文源地址与目标地址的编码、数据保留位制定等,以优化数据传输进程,缩短数据发送、读取与延迟时间,提高数据传输的实时性与可靠性;根据系统通信需求,对8字节的数据域进行空间分配[5]。
表5所示的5个数据帧为驾驶操作信号(离合器踏板、制动踏板、油门踏板、方向盘、手油门)向视景计算机节点发送的数据,根据应用层协议,源设备地址编码为B0,目标设备地址为E4,优先级为00110,通信方式为点对点,所以帧类型为01,标识符的所有元素组成了数据帧的ID:0x06 01 E4B0,DLC含义是数据长度码,一般为四位,定义的应用层协议使用的数据场长度为8字节,所以DLC编码为0x08.

表5 驾驶席MCU节点发送数据帧示例
4 软件系统设计
4.1基于LabVIEW的虚拟仪表盘设计
该重型卡车仪表盘包括指示灯、按键开关以及双针气压表、转速表、车速里程表等指针式仪表,涉及到开关量、模拟量、脉冲量信号的输入与输出。如采用实装仪表盘,会造成系统成本过高、驱动电路复杂、开发周期长的问题,影响模拟训练的经济性。
LabVIEW软件具有强大的界面修饰控件库与功能完善的函数工具包,可以自定义应用软件前面板,因此被称作“仪器仪表界面”[6]。操控系统选用工控机作为硬件平台,利用计算机便捷的图形编程环境开发基于LabVIEW语言的虚拟仪表盘,设计逼真的仪表显示界面(见图7),利用VISA通信模块读取串口字节数据,截取驾驶席处理单元发送的操纵信号字符串,按照通信协议进行解析与处理,利用数据处理函数进行分析,计算踏板踩下行程、方向盘转动角度等操作数据以及发动机转速、底盘车行驶速度、气动系统工作压力等技术状态,将运算结果作为输入端,驱动前面板指示灯、仪表等显示控件[7],虚拟仪表盘程序框图如图8所示。
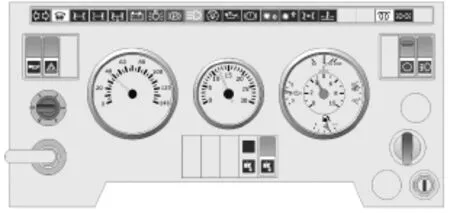
图7 虚拟仪表盘前面板
根据重型卡车的训练标准我们设置了车辆起步和停车、百米换挡驾驶、坡道起步、8子路驾驶、直角转向限制路、进出车库、蝶形移位、公路掉头、限制路驾驶等科目,根据车辆行驶经常遇到的状况,设计了超车、会车、倒车、多车编队、定点停靠、城市道路驾驶、高速公路驾驶等模拟场景,具备各种训练科目、道路条件、天候条件选择功能。同时,模拟器具备考核评判功能,能够及时正确的评定成绩,考核与训练过程可以全程回放,能够复现训练全景。如图9所示。
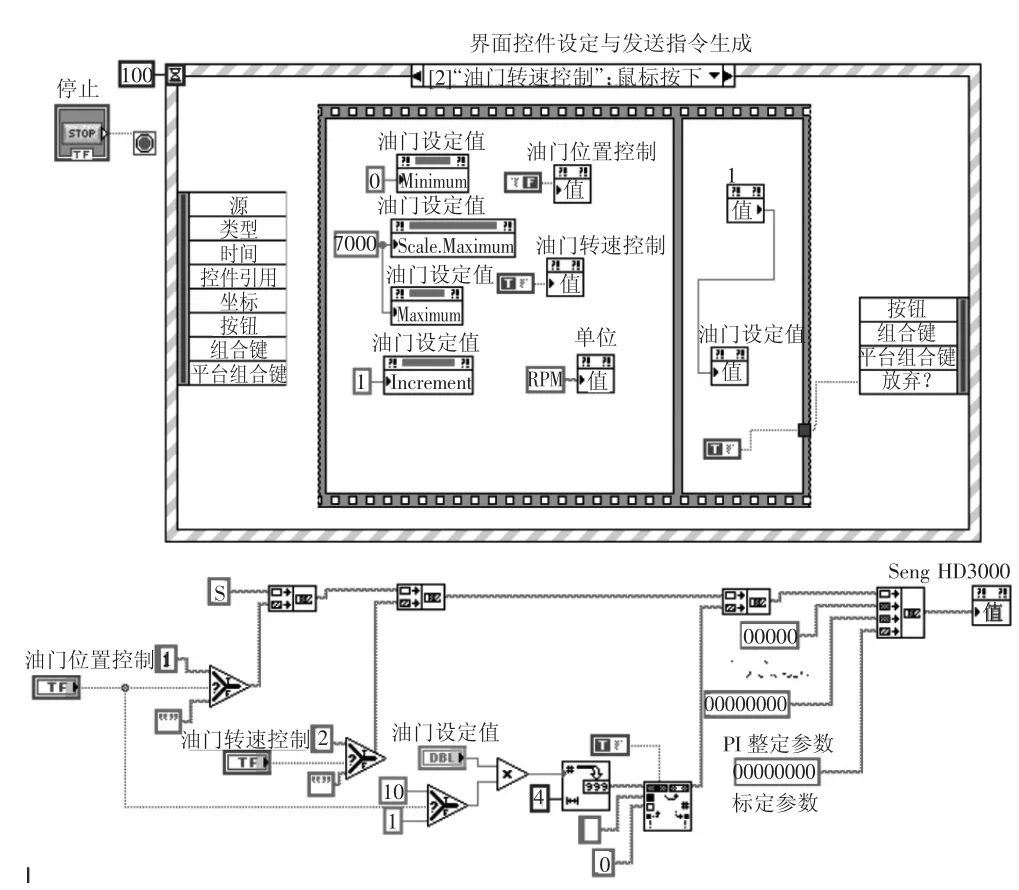
图8 虚拟仪表盘程序框图
仪表盘的逼真度很大程度上影响了训练效果,LabVIEW官方“封装管理器”(VIPackage Manager,VIPM)是该软件仪器界面编辑的强大工具包[8]。计算机通过安装金属风格控件库,可得到系列化的仪表、按钮、开关、图表等自定义控件,可以对其进一步编辑,也可在应用程序中直接调用。基于LabVIEW的虚拟仪表盘界面逼真、可裁剪,避免了仪表盘驱动电路的设计工作,并显著提高了人机交互效果。
4.2视景仿真软件系统设计
该重型卡车驾驶训练模拟器软件系统主要采用Unity引擎开发。根据仿真需求,选择了3D max和Unity进行相应的场景建模和实时驱动渲染。针对系统实时性要求,提出了地表渲染以及景物建模的优化技术[9]。通过分析车辆驾驶模拟器的实时驱动渲染系统,针对其中的碰撞检测和环境特效,做了深入的研究和分析,分别提出了基于自定义包围盒和Tripod法的碰撞检测方法,并且构造了基于粒子系统的降雨系统和实时控制模型。整个软件系统基于先进的车辆动力学模型设计开发,方向盘的转动力变化、车辆操控反应、道路反馈信息和车辆的技术性能仿真度较高。

图9 驾驶训练视景图
5 结束语
通过实践证明,基于半实物仿真技术和虚拟现实技术构筑的某重型卡车驾驶训练模拟器能够真实地模拟卡车驾驶的全过程,给受训人员一个逼真的操纵环境和视觉场景,具备与实际车辆基本一致的现场感觉。其既考虑了模拟器开发设计的成本,又充分考虑了模拟器与实车操作的差异性,平衡了开发成本与逼真程度这一矛盾,取得了较好的效果。
[1]魏明,曹正清,龚家伟,等.驾驶训练模拟器的设计与开发[J].计算机仿真,2004,(03):157-160,9.
[2]陈振生.现代新型传感器技术及应用[J].华通技术,2003,(04):7-15.
[3]贾伯年.传感器技术[M].南京:东南大学出版社,2000:179.
[4]张锡富.传感器[M].北京:机械工业出版社,1993:208-209.
[5]金有娟.基于虚拟仪器技术的汽车仪表盘设计[J].机械研究与应用,2012,(06):135-137.
[6]李军.检测技术与仪表[M].北京:中国轻工业出版社,2000:29-31.
[7]张琦,周祖安.履带式工程车模拟器数据采集与传输的设计与实现[J].中国工程机械学报,2006,(03):9-13.
[8]崔世辉.汽车CAN网络应用层协议的研究与实现[D].合肥:合肥工业大学,2011.
[9]魏明.汽车驾驶训练模拟器视景系统软件的研究与开发[D].北京:中国农业大学,2002.
Design and Developmentof Heavy Trucks'Driving Training Simulator
ZHENG Zheng,FENG Ke,WANG Pu,SHEN Jin-xin
(Field Engineering College,PLA University of Science and Technology,Nanjing Jiangsu 210007,China)
With the development of the simulation technology,driving training simulator can play amore important role in driving training.This paparmainly completed the overall design of driving training simulator,the design of operatingmechanism,data acquisition system based on CAN bus and software system.Based on hardware-in-theloop simulation technology and virtual reality technology,the driving training simulator simulates the whole process of truck driving,provides a realistic manipulation environment and visual scene to the trainees,so that it can achieve the purpose of raise the level of driving training.
training simulator;operatingmechanism;CAN;visual simulation
TP391.9
A
1672-545X(2016)05-0052-04
2016-02-01
郑铮(1988-),男,山东济南人,硕士研究生,研究方向:装备训练与指挥。