基于光学技术的水下气泡探测实验研究
2016-09-08秦华伟陶辰超范相会
秦华伟, 陶辰超, 蔡 真, 范相会
基于光学技术的水下气泡探测实验研究
秦华伟1, 陶辰超1, 蔡 真2, 范相会1
(1. 杭州电子科技大学, 机械电子工程研究所, 浙江 杭州 310018; 2. 浙江大学, 海洋学院, 浙江 舟山 316021)
热液/冷泉溢出含有硫化氢、甲烷、二氧化碳等化学成分的气泡。实验室模拟海底热液/冷泉资源溢出气泡环境搭建了实验平台, 以甲烷气体为实验气体, 在黑暗环境下用高速光电探测器对气泡后向散射光进行接收, 用拉曼光谱仪实现甲烷气体气泡后向散射光的拉曼检测, 并与计算拉曼光谱比较。由结果可知激光拉曼光谱可以探测到气泡后向散射光, 并识别气泡中含有的气体成分。通过探测气泡成分, 从而判定这些气泡是否来自海底热液/冷泉等甲烷资源溢出。这样的探测方式, 探测准确率高, 缓解探测深度, 同时避免探测设备直接与海底资源直接接触而造成的寿命缩减, 为将来的海洋探测与实际应用打下了良好的基础。
甲烷气体; 气泡后向散射光; 光电探测器; 拉曼光谱; 计算拉曼光谱
热液/冷泉相关领域的研究越来越引起海洋、生命研究领域科学家的广泛关注。深海热液其突出物理特征在于热液喷口上方形成的热液羽状流[1], 在部分热液喷口, 伴随有大量的气泡存在, 热液气体成分主要包括硫化氢、甲烷和二氧化碳等。对于大洋底部热液的调查手段而言, 主要利用热液区域和上覆水体的物理以及化学异常, 通过对大洋中热流的测量、热液周围及其喷口甲烷、锰等化学物质的异常观测、热液柱海水温度、盐度、密度等的观测、海底照相、声呐侧扫、深海潜水艇直接调查等实现对热液地带的分布调查以及具体探测[2-3]。所谓冷泉, 是指从洋底缓缓渗出的冰凉液体, 对于深海冷泉, 其突出物理特征在于冷泉上方大量气泡形成的气泡羽柱或气泡幕, 冷泉气体成分以CH4和CO2为主[4]。其富含的天然气水合物具有巨大的发展前景同时也可能引发环境灾害[5], 并孕育着围绕其生存的特异生物群。相对于热液地带的关注度以及探测研究技术方法, 对冷泉活动区的探测研究手段还略显单薄。目前, 主要集中于应用声纳技术对海底地形以及地貌进行探测、地震波的测量、大洋化学成分分析及海底拍照摄像等手段对冷泉活动区实现识别和分布调查[6-7]。这些传统水下探测手段在水下探测领域运用广泛。各类化学传感器、温度传感器、密度传感器等由于直接与探测源接触, 导致故障率高使用寿命短的缺陷。地貌、地震波探测手段也会存在精确度不高、周期性长的问题。对散射光测量方法主要有CDD相机拍摄成像, 再用图像处理获取图片灰度与散射光强关系, 用光电探测器接收散射光, 将光信号转换成电信号获取数据, 用光谱仪探测散射光, 获取光谱图等。散射方向在90°~180°方向的散射叫后向散射。后向散射光是在介质内部多次散射后逃逸出入射表面的光, 因此它必然携带了介质内部异常物体的情况信息。这样我们就可以通过对后向散射光的研究,达到研究散射介质的目的。在海水、大气、医疗等检测中后向散射探测运用广泛。而在水下拉曼技术方面, 欧美等海洋发达国家取得了一定进展[8-11]。其中具有代表性的是美国研发并制造的已在海底探测领域获得较得理想结果的DORISS系统。与西方发达国家相比, 我国将水下拉曼技术运用于海底勘探领域的发展相对缓慢, 存在一定的距离。我国在2006年底启动了国家863课题研究用以填补深海原位探测领域的空白并于2009年3月首试成功进行海试[12-13]。对于大洋底部热液/冷泉, 本文提出一种新的探测方法: 用激光拉曼光谱技术对深海热液/冷泉的气泡进行后向散射光的探测, 对含有上述气体成分的气泡进行识别, 从而判断该区域下方是否存在热液冷泉。这样的一种间接式探测深海热液/冷泉的方法, 具有准确率高, 缓解探测深度的优势, 同时也避免设备长期过近与热液/冷泉接触造成设备使用寿命缩短。陆地能源日趋紧张, 迫切需要发展深海探测与资源开发技术, 激光拉曼光谱技术在深海探测领域的运用有利于推进开发利用海洋资源, 加快了解海洋环境和利用深海资源的进程, 为国家能源安全, 资源安全分忧解难, 加快实践社会和经济可持续发展的战略目标。
1 水下激光与激光拉曼技术简介
激光在海水中传输时将被海水中的水分子、溶解物质、固体悬浮物或者海水中的气泡吸收和散射, 他会限制光波在海水中的传输距离。海水中光的消光特性与光的波长、海水所含的物质、海水的深度等因素密切相关。海水的吸光表现为入射到海水中的部分光子能量转化为其他形式的能量, 如热动能和化学势能, 同时激光在海水中也会产生不同方向的散射光, 所以激光在水下传输时表现出衰弱机制[14]。在散射光中典型的有前向散射和后向散射, 针对激光在水下的后向散射主要表现为水的后向散射和气泡的后向散射。后向散射光是在介质内部多次散射后逃逸出入射表面的光, 因此它必然携带了介质内部的情况信息。
拉曼散射现象由印度科学家拉曼于1928年发现。其阐述了光照射到特定物质上时, 入射光的光子与分子发生的不同碰撞以及相互之间能量和频率的变化; 光子与分子之间没有能量交换, 光子只改变运动方向而不改变频率, 这种散射过程称为瑞利散射; 光子改变运动方向且与分子间有能量交换, 光子频率得到相应改变, 这种散射过程称为拉曼散射; 拉曼散射又分为斯托克斯散射和反斯托克斯散射[15]。根据光照射到特定物质上散射光发生的频率变化, 被运用于物质结构的分析, 实际运用中拉曼实验一般监测到的是斯托克斯散射。拉曼谱线的数量, 频移取决于分子本身固有的振动和转动能级的结构, 反映的是分子内部各种简正振动及有关振动能级的情况。激光拉曼光谱技术运用在海底热液/冷泉等甲烷资源的探测, 探测的是激光穿过含有化学成分的气泡产生的后向散射光, 这是本项目的创新之处, 不直接接触热液/冷泉, 准确率高, 检测的长期稳定性好。
需要说明的是, 光在水中传播其衰减严重, 且在拉曼光谱中, 瑞利散射线的强度只有入射光强度的10–6, 拉曼光谱强度又只有瑞利线的10–6左右, 常规水下拉曼光谱强度太弱, 因此其不能直接进行远距离探测, 只能用于近距离化学成分识别。
2 对气泡后向散射光的探测研究实验
2.1 实验装置
第一部分实验装置示意图如图1所示。由于实验中所模拟的气泡尺寸及范围较小, 故选取长宽高为40 cm×50 cm×40 cm的玻璃水箱作为模拟容器, 并将水箱放置在光学平台上以隔绝外界震动。
实验装置的主要部件包括: 激光光源及光学接收部分。
其中, 激光发射部分有激光光源和扩束准直镜构成。本次实验采用DPSS激光器, 即二极管泵浦固体激光器作为激光光源, 型号为FRANKFURT公司的FPYL-532-30T。该激光器工作模式为连续波长, 其输出波长为532 nm, 输出功率为0~30 mw可调, 其出射光束半径约为2.0 mm, 发散角度小于1.2 mrad。为了减小激光光束的发散角, 并使光束传递回更多的有用信息, 实验中需要在光源后添加扩束准直装置, 本实验采用开普勒扩束镜, 该类扩束镜将一个凸透镜作为输入, 激光通过该透镜后, 束腰半径被缩小且最小点与该透镜焦点重合。之后使光束通过另一个焦距较大的凸透镜, 扩大光束半径、减小发散角。
本次实验采用10倍、20倍物镜及焦距为60 mm的双凸透镜组成扩束准直镜, 其扩束倍数为3倍或6倍, 扩束准直后发散角为0.4 mrad和0.2 mrad。
实验中采用的散射光接收装置为Thorlabs公司的DET36A高速光电探测器, 其光谱响应范围为350~1 100 nm, 峰值波长为970 nm, 响应时间为14 ns, 响应度0.65 A/W。
由于在实验中不能完全保证环境的黑暗, 为避免其他波长的光对实验产生影响, 故在探测器前放置滤光片, 在保证气泡后向散射光尽可能多的进入光电探测器之外、最大限度的阻止太阳光、灯光等其他背景噪声, 实验中复合滤光部分采用直径为25 mm、厚度为0.6 mm的532 nm带通滤光片。
实验中分别利用扎了不同孔径大小的软管、带流量控制的输液管和气泵作为气泡发生装置, 产生尺寸大小不一的气泡群; 而带有流量控制的输液管用于产生单个气泡, 通过流量控制可对气泡产生速度进行调节。
激光器发射出的光束经过扩束准直系统后, 经一个与光束成45°的反射镜从水箱侧面进入, 再通过在水箱中45°放置的反射镜照射到气泡上, 水箱中放置吸光装置对出射光进行吸收, 消除水箱玻璃上存在的光斑。针对激光在水中会发生散射现象, 还需要将遮光黑布放置在水箱底部及右侧, 用来减少折射光对实验的影响。
对气泡后向散射光的反射是利用收发合置装置进行实现的, 该装置即为一块中心带小孔的反射镜, 激光从反射镜中心小孔通过后照射到气泡上, 由于气泡会对激光产生散射, 其后向散射光沿着入射方向返回到反射镜上, 并最终反射出水箱, 由高速光电探测器进行接收。同时, 由于散射光强度很弱且较发散, 直接探测会存在一定困难, 在水箱与探测器前放置一凸透镜对散射光进行聚焦, 以尽可能地获得更多散射光。实验装置实物图如图2所示。
第二部分实验装置示意图如图3所示, 这一实验采用显微光谱仪, 型号为英国Renishaw公司的inVia, 实现气泡后向散射光的拉曼检测, 配有高稳定性研究级德国Leica显微镜, 光谱分辨率为1 cm–1, 空间纵向分辨率为2 µm。实验过程和上一实验类似, 不过多阐述, 最后用计算机采集数据。气体上我们选择天然气为实验气体。不同的是最后用光谱仪来探测散射光, 从而获取拉曼散射光谱。
2.2 实验结果及分析
在开始探测前首先对该实验装置进行了测试。然后依顺序打开光电探测器、激光器及气泡发生器, 间隔一段时间后, 再依次关闭气泡发生器、激光器及光电探测器, 光电探测器所接收到的信号用示波器记录, 最终结果见图4。
从图4中可以看到, 当气泡发生器打开后, 探测器所接收到的信号开始有大范围的上下波动, 出现了许多不同间距、不同幅值及宽度的脉冲信号; 当气泡发生器关闭后, 这些信号出现了明显的减弱, 最后信号又恢复到最初值。可以发现在此过程中信号的变化与水中气泡的数量及运动特性有直接的关系:
当气泡刚产生时, 探测器所接收到脉冲信号的振幅和宽度都较小; 当气泡发生器开始稳定工作后, 脉冲信号的振幅及宽度都有所增加; 在最后当关闭气泡发生器时, 由于水中气泡并没有马上消失, 同时在水中还存在着各种悬浮颗粒, 所以使得接收到的光散射信号也存在平缓的过度。
为了获得所需要的气泡动态信息, 我们对所测得信号进行适当的处理。由于探测器所接收到的是在不同时间范围内的光强, 我们对该图像中10~ 11.8 s的部分放大, 如图5所示, 可以发现气泡的散射信号在图中表示为一系列的脉冲信号, 其振幅和宽度并无明显的规律性。
对图5中数据进行快速傅里叶变化(FFT), 将信号变换到频域, 获取其频率信息, 其计算结果如图6所示, 该计算过程由Matlab实现。
由图6可知, 低频在所有能量中占据了大部分, 这是由于在所接收到的散射光中水体的后向散射光所占的比重很大; 但同时也可以发现, 图中存在着2种振幅较大的频率信号, 分别为35 Hz、80 Hz左右, 这些频率就是由气泡散射光所引起的。
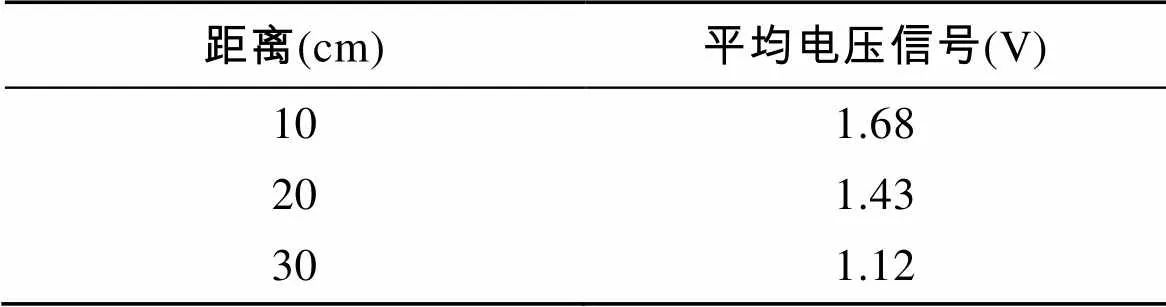
其他条件不变, 通过改变气泡源的位置来改变探测的距离, 得到不同探测距离的电信号。表1为气泡源距离远近与后向散射光强度大小的关系表。