散货料场智能化信息化可视化的研究和应用*
2016-09-08杨天龙杨天宇
黄 欢 周 泉 杨天龙 杨天宇
泰富重装集团有限公司
散货料场智能化信息化可视化的研究和应用*
黄欢周泉杨天龙杨天宇
泰富重装集团有限公司
介绍了集料场可视化管理、作业智能化调度、物料和料堆信息化管理、设备自动化作业等多种先进技术于一体的可视化、信息化、智能化料场管理控制平台的硬、软件构成及其在堆取料机的自动堆取料控制中的应用。该系统主要是利用激光扫描技术,对料堆进行实时扫描,形成2D/3D可视化图像、料场及料堆管理信息,同时通过智能化控制将这些信息转化为PLC的控制指令,控制堆取料机自动完成堆取料作业。
散货料场;智能调度;信息管理;3D可视化
1 前言
目前,在散货料场中,堆取料机主要负责物料的堆取作业,是整个原料场中非常重要的生产环节,其堆取作业通常依靠现场操作人员进行,堆取料设备操作人员根据散料输送中控室的指令和个人的经验,将堆取料机开到指定的料堆点进行堆取料作业。一方面由于原料场现场往往是露天的,受风、雨等自然条件影响很大,且在设备运转的过程中产生了大量的可吸入性粉尘,漫天的粉尘严重影响到操作人员的健康;另一方面由于人工操作,物料的信息完全是人手工编写,不利于料场物料的信息化管理,同时料场料堆的分布、物料种类、设备状态等相关信息无法实时显示。因此,如何有效地减少人为因素,改善劳动环境,降低劳动强度,降低劳动成本,加强物料信息的管理以及实现料场可视化,成了散货料场面临的共同问题。
2 系统组成
2.1硬件系统组成
散货料场智能化、信息化、可视化硬件系统主要由斗轮堆取料机控制系统和中控室中央控制系统两部分组成,见图1。
(1)堆取料机控制系统主要完成本地堆取料控制、各机构状态、故障采集、激光扫描及数据处理。堆取料机设有本地PLC可编程逻辑控制系统,用于实现本地的堆取料机的逻辑控制和堆取料机各个机构状态及故障的数据采集。堆取料机上设有一台高性能的机上堆取料自动作业工控机操作站,用于实现与PLC的通信控制、局部堆型的数据处理以及自动堆取料作业。在堆取料机的立柱顶端安装三维激光扫描系统,用于扫描料堆数据,操作站把扫描的堆型数据进行处理,通过以太网传送给中控室中央服务器。堆取料机的臂架上设RTK-GPS系统,用于实现堆取料机的回转、俯仰、走行的精确定位。
(2)中央控制系统主要完成堆取料机设备调度作业计划的生成、自动堆取料机作业系统控制及料场料堆及物料管理。中控室设有冗余的服务器,用于料场料堆的三维处理、料堆堆取料作业控制以及与堆取料机控制系统的实时通信。该服务器安装了oracle数据库,用于保存堆取料机的状态、料场信息以及料堆信息等。中控室还设有远程操作手柄,必要时可以通过中控室的中央控制系统进行人工干预。

图1 硬件系统组成
2.2软件平台组成
散货料场智能化、信息化、可视化系统软件平台主要由如图2所示的7个部分组成。

图2 软件平台组成
堆取料机自动作业系统主要实现料堆扫描及堆取料机高精度定位、激光将扫描后的料堆数据以及定位数据,以指定料场为原点,实现料场料堆及设备的空间坐标转换、作业参数设定和修改、各个设备操作权限的管理、自动规划作业路径可视化与堆取料自动化控制、作业状态监控和进度管理以及作业设备姿态和对象料堆实时可视化。
料堆可视化软件系统主要负责由各个区域扫描的料堆数据进行网格化处理,实现整个料场料堆数据的拼接、全料场料堆的2D或3D模式的可视化并具有视角转变、局部放大等功能;实现料堆区域范围的智能化识别。
料场料堆及物料管理软件系统主要负责实现物料信息追踪,包括物料的种类、运输的批次、客户名称等信息;实现料堆分布管理和可视化,包括料堆的编号、料堆的分布、设备的分布等信息;实现物料信息管理,包括物料编号、料堆位置、料堆体积、料堆重量、作业设备等信息;实现料堆物料盘库。
堆取料作业设备调度软件系统,主要是负责堆料作业时作业区域自动寻优,当收到中央调度计算机的作业计划后,根据物料种类、作业吨位等进行场地选择;当料场没有此物料时,自动进入新堆模式,计算相应的起始位置后,推荐合适的空地给操作人员;如果料场有此物种时,则进入空地堆新堆、续堆或者补堆模式,计算相应的起始位置后,推荐合适的位置给操作人员;取料作业时,判断最合适料堆,计算取料的起始位置和终止位置,自动寻优;实现单个作业计划的多种作业方案推荐;作业结果提前可视化预览。
料场设备防碰撞软件系统主要负责作业过程中的动态防碰撞、防碰撞区域范围和等级可设定、设备防碰撞的动态2D和3D显示。
堆取料设备远程管理软件系统主要负责堆取料设备的运行状态监控;堆取料设备作业数据记录与统计;堆取料设备维护保养管理;设备故障、报警显示与处理。
3 技术实现
3.1三维激光扫描与坐标系转换及高度定位
3D激光扫描仪(替代人工操作过程中的人眼)利用TOF飞行时间原理,对堆取料机周边的料堆进行扫描测距,并进行一系列的滤波、去振动、去雨雾干扰等数据处理后,进行连续的多维空间坐标系转换,获取料堆表面网格在料场参照坐标系中的绝对坐标。堆取料机的定位精度直接关系到扫描料堆后还原坐标系时数据的准确性,从而对取料时斗轮斗体的切削深度控制、取料流量控制精度、料堆体积计算精度都有很大影响。因此系统采用两点RTK-GPS系统,利用基准站和流动站的差分互校功能实现高精度定位,并采用坐标系矩阵变换计算出走行位置、回转角度、俯仰角度。3D激光扫描仪见图3。

图3 3D激光扫描仪
3.2料场整体海量点云数据的处理与拼接及3D动态显示
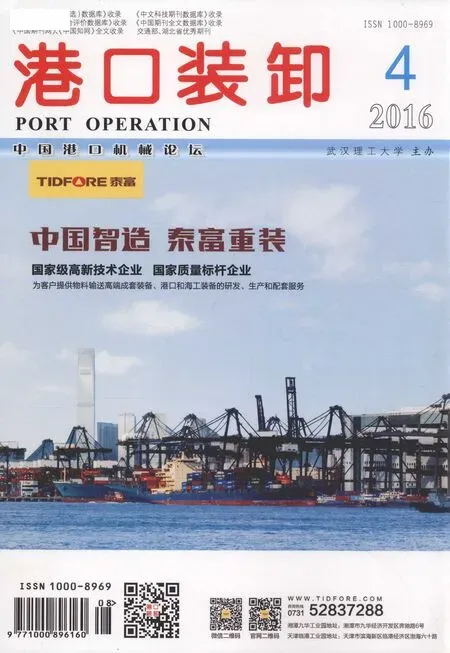
中控可视化计算机需要接收各台设备发回的料堆表面网格坐标数据,并采用特殊并行算法进行处理,提升处理速度,将各个区域的扫描数据进行边缘重合数据处理后进行拼接,实现整个料场点云数据的整合。为便于更加直观地显示料场和设备的状态,可引入3D绘图渲染技术,这就需要采取特殊的图像算法,保证料场和设备3D的实时动态显示,保证3D画面的渲染质量,同时还必须保证图像更新的实时性。料场拼接及3D可视化效果见图4。
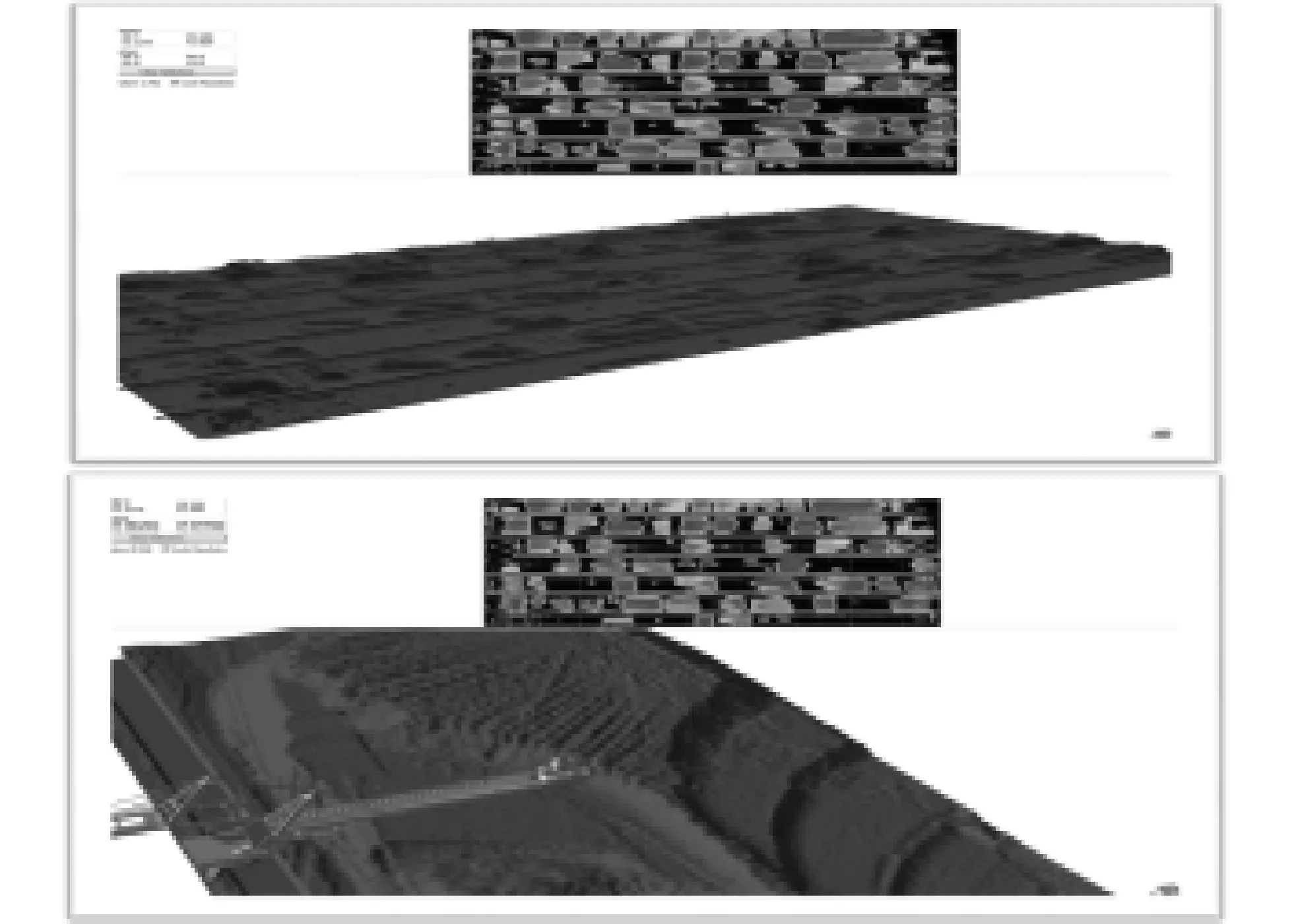
图4 料场拼接及3D可视化效果
3.3取料流量的控制
取料过程中料堆随时可能出现空隙,或者设备回转出了取料作业料堆范围之外,这样易造成物料流量的不恒定,降低取料效率,因此系统采用先进机器视觉PID预估控制算法,通过实时分析料堆的形状来调整回转的方向和速度。同时还实时监测斗轮电机电流或液压系统压力,通过数学模型估算来调整回转速度,保证流量处于较为稳定的范围内。取料流量控制如图5所示。

图5 取料流量控制
3.4料场料堆识别、数据管理和设备的智能化调度
为了便于计划管理人员操作便利,需要采用图像识别算法对料场的料堆进行识别,判别每个料堆的范围和起始位置,从而将其与作业参数(如物料种类、作业量、作业时间、作业设备等)进行整合后,以直观分布图的方式进行显示。可以在可视化界面上查看到每个料堆的各种详细信息,也可在利用此数据的基础上,引入智能调度算法,完成堆取料作业设备的智能化调度。
4 结语
本系统结合了激光扫描技术、GPS技术、料场三维成像技术、PLC控制技术,实现了料场可视化、信息化、智能化管理控制,大大地改善了劳动环境,降低了劳动强度,提升了料场管理和调度水平。
Research and Application of the Intelligence,Informatization &Visualization Technology on Bulk Material Field
Huang HuanZhou QuanYang TianlongYang Tianyu
Tidfore Heavy Equipment Group Co., Ltd.
The paper mainly introduces the hardware and software constitutes of the visualization , informatization and intelligence stockyard management and control platform, which contains a variety of advanced technologies such as stockyard visualization, intelligent job scheduling, information management of material and stockpile, and automation jobs. The platform is developed to achieve the real-time scanning of the stockpile by utilizing the laser scanning technique. Through this method, it can generate the 2D/3D visualization pictures as well as management information of stockyard and stockpile. Furthermore, the system can also convert the management information into the PLC Control commands by intelligent control system and further control the Stacker/Reclaimer to complete stacking/reclaiming operation automatically.
bulk material stockyard; intelligent job scheduling; information management; 3D visualization
2016-05-20
10.3963/j.issn.1000-8969.2016.04.015
*科技计划项目:湖南省科技成果转化及产业化,项目编号:2014CK1001
黄欢: 411201,湖南省湘潭市九华经济技术开发区奔驰路6号