用于竖直混凝土建筑物检查的遥控车
2016-09-08美国LindbergGuimaraes美国电力研究所
美国·J.Lindberg,M.Guimaraes(美国电力研究所)
用于竖直混凝土建筑物检查的遥控车
美国·J.Lindberg,M.Guimaraes
(美国电力研究所)
长期运行和维护的热电厂和水力发电厂需要定期检查混凝土冷却、密封和蓄水结构,以确保安全和可靠性。目前,大型、竖直混凝土结构的检查通常采用人工方式,耗时、昂贵、且其工作环境使工作人员面临着潜在的危险。为了解决检查技术问题,美国电力研究所对各种类型的机器人技术进行了研究和评估,并开发了一种攀爬装置,可用于执行多种具体的检测任务。攀爬器搭载着先进的无损检测仪器,电脑编码的数据和图像提供了前所未有的探测混凝土内部结构的能力,可以对孔隙、钢筋锈蚀及其他内部缺陷进行定位和定性描述。该混凝土攀爬器不再需要使用脚手架,能对冷却塔、水电站大坝、核反应堆等建筑物进行自动、安全和综合的检查,以此来支持发电设备的长期运行。
竖直混凝土建筑物;检查;攀爬器
1 简介
能源行业的基础设施中包括许多大型、曲面或竖直的建筑物,如冷却塔、核防护建筑及水电大坝等,如图1所示。对这些建筑物的检查通常是采用人工方式,借助脚手架进行。若能将这些检查实现自动化,则可以减少检查时间、降低成本,使检查更有效率,增加检查频次并降低安全风险。
美国电力研究所(The Electric Power Research Institute,ERPI)对不同类型的技术及其成熟度进行了评估,最终选出了一个可以适应各种不同的需求设备。该设备不包括定位系统或无损评价装置(Nondestructive Evaluation,NDE),而是通过对现有技术进行改造,从而融合进了攀爬技术。2012年秋天,结合一映射和定位系统以及一空气耦合无损评价装置,对该攀爬设备进行了使用验证。文章主要强调了寻找合适设备的过程以及对其功能的验证。
2 开发
目前,检测工作需要靠人工接近建筑物,通常是借助脚手架。这个过程十分困难、耗时且蕴藏着危险性。改进的混凝土检查方法对煤电厂、核电厂和水电站混凝土大坝来说均具有实用价值。混凝土自动化检测的应用意味着可对竖直混凝土建筑物进行更快速和更经济的检测,因此可以方便地开展检测,满足电站老化时需要进行更频繁的检测需求。
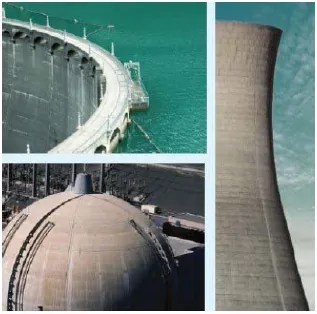
图1 能源行业中常见的大型、曲面或竖直的建筑物Fig.1 Large,curved,vertical structures are common in the energy industry
目前已有技术可以对水平混凝土建筑物(比如桥梁和道路)使用滚轮自动化设备进行检测。但挑战在于竖直和曲面的混凝土建筑物。通过某种粘附机制(如真空),有的自动化设备可以吸附在建筑物表面并能够灵活移动,这些建筑物的检测可通过使用这样的自动化设备来进行,以加快检测过程并降低成本。
理想的设备应该能够用于户外工程现场,带电池或独立电源,可以携带对混凝土进行无损测试的装置,并能够在粗糙的混凝土表面自由移动。
该项目的目标是评估使用自动化设备来对竖直的混凝土建筑物进行无损检测的可行性,并进行小规模的现场测试和制订技术验证的策略。
3 寻找可用的技术
实现大型土木基础设施检测自动化的第一步是在其他领域、美国及国际上寻找可以满足该需求的设备。为达到该目的,发起了一个方案征集活动。
这一征集活动希望得到的是可对大型竖直混凝土建筑物表面进行检查的遥控车设备。另外,理想的技术还要实现下列功能:
(1)能在混凝土表面垂直行走;
(2)能在粗糙的混凝土表面行走;
(3)能在凹凸的表面行走;
(4)能在混凝土表面进行位置控制,包括记录坐标数据;
(5)能搭载进行混凝土无损检测试验的装置;
(6)足够坚固,能适用于野外工程现场,可防雨和防潮;
(7)最好有电池或独立电源,可供使用3~4天的时间。
4 评估的技术
在公开征集期结束后,一共收到了43份回复。其中包含18条来自其他行业的回复和15条来自学术界的回复。图2所示的饼图详细显示了所有回复者的位置分布及这些答案的分布情况。
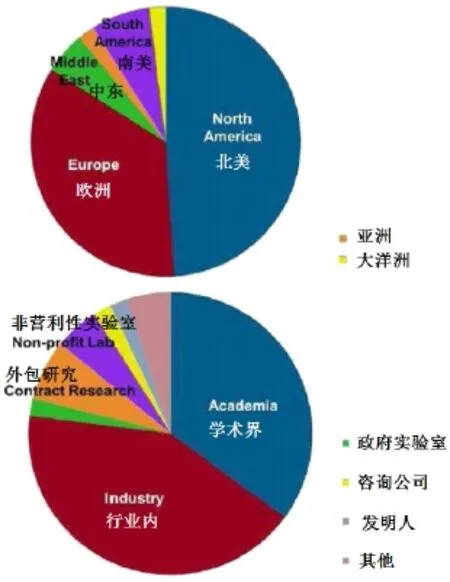
图2 回复的分类及分布Fig.2 Types of responses and geography
方案征集活动要求技术的成熟度是公开的。回复中涉及到的各技术的成熟度差异较大,跨度从概念性的到原型模型都有,有几条回复中涉及的技术已经实现了商业化。
方案征集活动制订了要求,但未具体规定方法。回复者提供了三种基本的方法:(1)飞行器;(2)攀爬器;(3)绳索牵引的或绳索驱动的设备。图3所示为根据用于接触竖直建筑物的基本方法而进行的对各方案的分类回复。
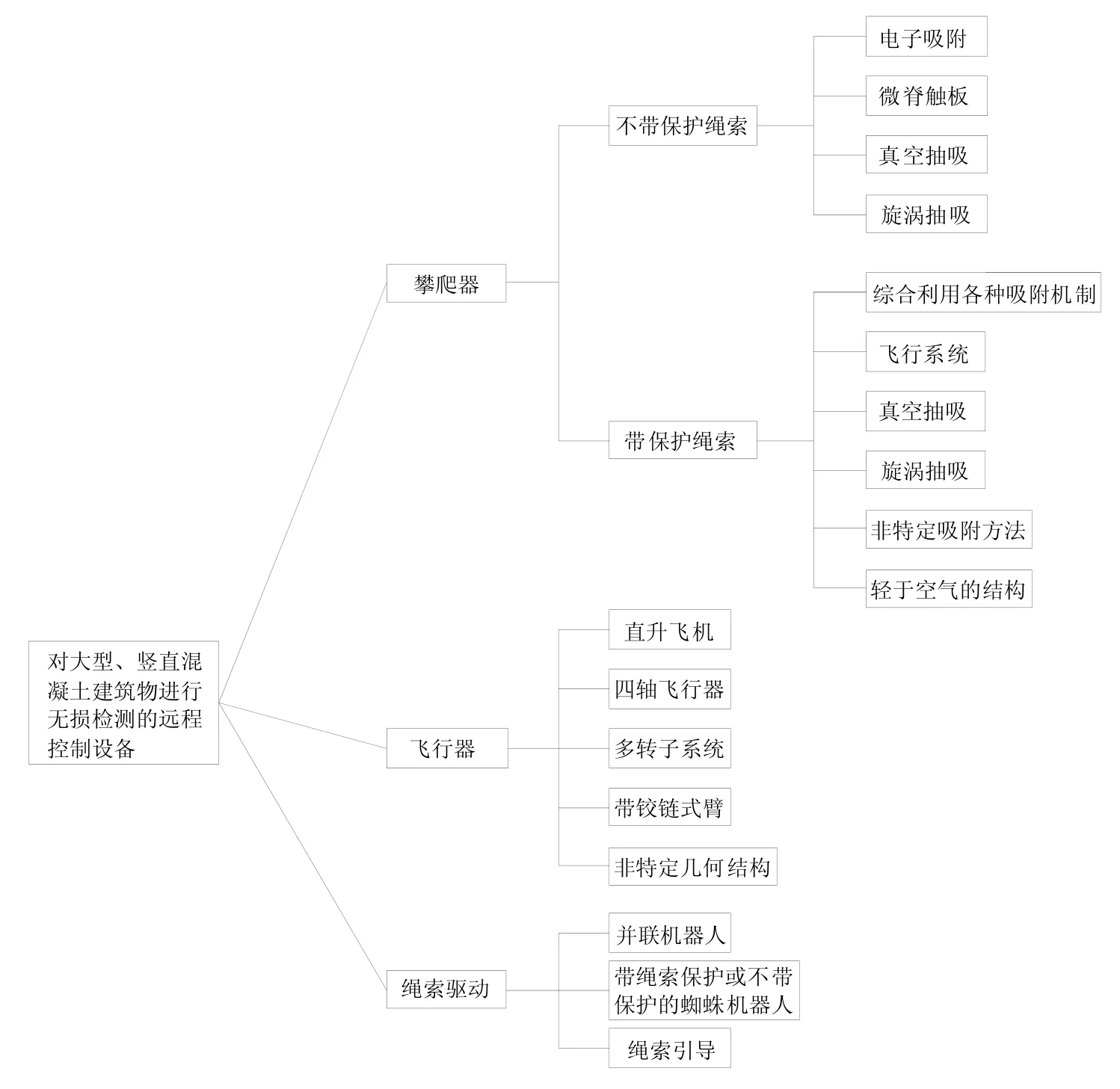
图3 根据方法对回复方案进行分类Fig.3 Types of responses by approach
5 选择的方法
最终从43组回复中选择了由美国西南研究院(SouthWest Research Institute,SWRI)与国际攀爬机器人公司(International Climbing Machines,ICM)提交的方案。被选中的方法满足了方案征集活动提出的大部分要求,选择它的原因还在于其稳健性和潜力。
国际攀爬机器人公司的设备采用真空机理以吸附在混凝土墙上。该专利系统利用一个中央真空腔,周围为滚动的泡沫密封剂,既可以提供密封,又可以提供推进动力。其真空腔可在许多种材料表面产生超过225磅(约102.06 kg)的吸附力。该系统可在大多数材料表面穿行,包括含铁的和不含铁的金属、复合材料、混凝土和砖构建筑物。它可以粘附在凹凸的表面和悬伸出来的表面上,甚至可以通过间隙、缝隙以及表面上的障碍物,如导管等。图4为其应用的几个案例。

图4 被选设备的应用案例Fig.4 Example applications of selected device
国际攀爬机器人公司的攀爬器通过手持的遥控车来操作,要求系上带有坠落保护器的绳索(高度小于10英尺(约3.048 m)时可以不要求带坠落保护器)。国际攀爬机器人公司开发了几个版本的坠落保护器和保护系统,可以自动保持安全绳索上加有合适的拉力。攀爬器实质上是一个遥控车,但对于大规模的检查任务,还需要有准确的位置信息,以标识出位置和设备的行进路径。
6 位置和定位系统
美国西南研究院为国际攀爬机器人公司的攀爬器开发并结合使用了实时定位和地图系统(Simultaneous Localization and Mapping,SLAM),能生成和展示设备的位置及建筑物的二维地图。实时定位和地图系统的编码是由德国达姆施塔特工业大 学(TechnischeUniversität Darmstadt,TUDarmstadt)开发的开放资源编码。
该实时定位和地图系统包括一个惯性测量单元(Inertial Measurement Unit,IMU),还结合进了激光扫描测距仪(LIDAR),可以进行高精度的测量。该系统是模块化的,因此可以装在任意平台上,利用电池供电。
7 验证
验证的目的是核实其关键的移动技术,它能让攀爬器有控制地进入各种混凝土建筑物和几何结构,并验证提供地点信息的定位和追踪系统。
另外,位于奥斯丁的德克萨斯大学(University of Texas,UT)也演示了他们安装在攀爬器里的空气耦合冲击回波检测技术。该系统在攀爬器上的应用相对简单,因为它是非接触型的(除了冲击锤以外),并且只要求将抛物面反射式传声器粘贴在机器上。这次的验证过程中,由人工使用一个小锤制造冲击,通过现有的德克萨斯大学数据接收系统来进行数据收集工作。实时定位和地图系统提供的位置信息可以与检测数据进行关联,以形成缺陷地图。
带有定位装置(实时定位和地图系统)的攀爬器以及空气耦合冲击回波检测装置的示意图如图5所示。
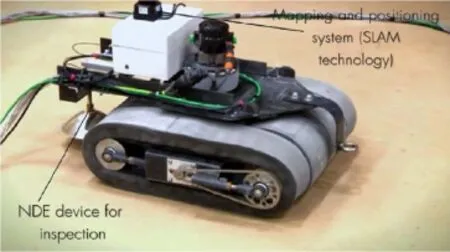
图5 带有定位装置的攀爬器以及安装的空气耦合冲击回波检测设备Fig.5 ICM climber with the positioning system and the air-coupled impact echo device installed
8 结语
经验证的攀爬器和无损评估传感系统看起来可以很好地适用于大型、相对平整的混凝土建筑物的检查。工作平台的移动能力很好,能在粗糙的表面穿行,甚至能跨越小型的障碍物。无损检测传感器可以在移动过程中进行各种定位和操作步骤,对周围噪声和真空噪声都不敏感。定位系统的精度也足够高,可以形成建筑物地图。该综合性的工作平台对大幅提升混凝土建筑物的检查效率、降低检查成本和提高检查安全性有巨大的潜力。
验证的系统被认为是原型可行性论证器,其系统技术成熟度水平(technology readiness level,TRL)约为TRL5。攀爬器已经实现了商业化(TRL9),但定位和传感子系统的技术成熟度水平为TRL4或TRL5。因此,还需要进一步进行测试和开发。
该验证是在可控制的环境中进行的。2014年7月,曾在一座水电站大坝上进行了后续的验证,效果良好,因此美国电力研究所可以向前推进这一概念。
文献来源:Proceedings of the 3rd International Conference on Applied Robotics for the Power Industry
翻译:崔弘毅
校核:许传桂
Title:Remote controlled vehicle for inspection of vertical concrete structures//by
J.Lindberg and M. Guimaraes//Electric Power Research Institute
Long term operation and maintenance of steam and hydropower driven electric power plants requires periodic inspection of the concrete cooling,containment and impoundment structures to assure safety,and reliability.Currently,inspections of large,vertical concrete structures are performed manually which is time-consuming,costly,and exposes workers to potentially dangerous work environments.To address this inspection technology gap,Electric Power Research Institute researched and evaluated various types of robotic technologies;and developed a crawler device that could be adapted to perform a multitude of concrete inspection tasks.Its payload of advanced nondestructive examination instrumentation,computer encoded data and imaging provide unprecedented capabilities to interrogate the interior of concrete structures;and locate and characterize voids,rebar corrosion,and other internal defects.The concrete crawler obviates the need to use scaffolding and supports long-term operation of generating assets by enabling automated,safe,and comprehensive inspections of structures such as cooling towers,hydro dams,and reactor containments.
vertical concrete structure;inspection;climber
TV698.1
A
1671-1092(2016)03-0087-04
2016-04-25
