水电站全数字式微机励磁系统的通讯规约设计
2016-09-07徐金勇浙江温州珊溪经济发展责任有限公司赵山渡水力发电厂浙江温州325300
徐金勇(浙江温州珊溪经济发展责任有限公司 赵山渡水力发电厂,浙江 温州 325300)
水电站全数字式微机励磁系统的通讯规约设计
徐金勇
(浙江温州珊溪经济发展责任有限公司 赵山渡水力发电厂,浙江 温州 325300)
针对目前全数字式微机励磁系统,主要通过通讯规约的设计,包括串行通讯口的设置、通讯协议的设置等,使得水电站全数字式微机励磁系统能够与计算机监控系统对接,达到比较好的效果。
通讯协议;励磁系统;全数字式;水电站
1 引言
励磁系统与监控系统LCU的接口方式非常灵活,既可以是常规的继电器接点方式,也可以是通讯方式,还可通过现场总线以组网方式接入监控系统。而且,以上几种接口方式还可混用。用户可根据自身的需要选用其中一种或多种接口方式。
2 串行通讯口的设置
励磁系统与监控系统之间的串行通讯采用Modbus通讯规约。通讯协议支持RTU模式。出厂默认设置如下:
电气接口规范:RS485(隔离)
站号:1
通讯模式:RTU
波特率:19 200 bit/s
数据位:8位
停止位:1位
校验位:偶校验
站号、波特率(最大57 600 bit/s)、停止位、校验位可根据现场要求更改。
3 通讯协议
3.1读取励磁系统状态
监控系统可通过下述方式读取励磁系统的基本信息。
(1)命令格式(表1)

表1
(2)响应格式(表2)

表2
(3)读数据表(表3)

表3
继电器状态的定义参见“励磁系统输出状态定义表”的说明。
16进制模拟量数据传送顺序:Hi…Lo先发送高字节,再发送低字节。
3.2以当前工况进入恒无功调节
向00D5寄存器写入1执行命令,再延时100 ms以上写入0复归命令,可以使励磁系统无条件进入恒无功调节状态,无功设定值为当前的无功值。
(1)执行命令(写入1)格式(表4)

表4
(2)执行命令的响应格式(表5)

表5
(3)复归命令(写入0)格式(表6)

表6
(4)复归命令的响应格式(表7)

表7
3.3退出恒无功调节
向00D6寄存器写入1执行命令,再延时100 ms以上写入0复归命令,可以使励磁系统退出恒无功调节。
(1)执行命令(写入1)格式(表8)

表8
(2)执行命令的响应格式(表9)

表9
(3)复归命令(写入0)格式(表10)

表10
(4)复归命令的响应格式(表11)

表11
3.4当前工况进入恒功率因数
向00D7寄存器写入1执行命令,再延时100ms以上写入0复归命令,可以使励磁系统无条件进入恒功率因数调节状态,功率因数给定值为当前的功率因数。
(1)执行命令(写入1)格式(表12)

表12
(2)执行命令的响应格式(表13)

表13
(3)复归命令(写入0)格式(表14)

表14
(4)复归命令的响应格式(表15)

表15
3.5退出恒功率因数
向00D8寄存器写入1执行命令,再延时100 ms以上写入0复归命令,可以使励磁系统退出恒功率因数调节。
(1)执行命令(写入1)格式(表16)

表16
(2)执行命令的响应格式(表17)

表17
(3)复归命令(写入0)格式(表18)

表18
(4)复归命令的响应格式(表19)

表19
3.6系统电压跟踪投入
向00D9寄存器写入1执行命令,再延时100 ms以上写入0复归命令,可以使励磁系统进入系统电压跟踪调节。
(1)执行命令(写入1)格式(表20)

表20
(2)执行命令的响应格式(表21)

表21
(3)复归命令(写入0)格式(表22)

表22
(4)复归命令的响应格式(表23)

表23
3.7退出系统电压跟踪
向00DA寄存器写入1执行命令,再延时100 ms以上写入0复归命令,可以使励磁系统退出系统电压跟踪调节。
(1)执行命令(写入1)格式(表24)

表24
(2)执行命令的响应格式(表25)

表25
(3)复归命令(写入0)格式(表26)

表26
(4)复归命令的响应格式(表27)

表27
3.8PSS投入
向00E1寄存器写入1执行命令,再延时100ms以上写入0复归命令,可以使励磁系统投入PSS功能。
(1)执行命令(写入1)格式(表28)

表28
(2)执行命令的响应格式(表29)

表29
(3)复归命令(写入0)格式(表30)

表2830
(4)复归命令的响应格式(表31)

表31
3.9PSS退出
向00E2寄存器写入1执行命令,再延时100ms以上写入0复归命令,可以使励磁系统退出PSS功能。
(1)执行命令(写入1)格式(表32)

表32
(2)执行命令的响应格式(表33)

表33
(3)复归命令(写入0)格式(表34)

表34
(4)复归命令的响应格式(表35)

表35
3.10命令列表
把上述命令汇总于表36。
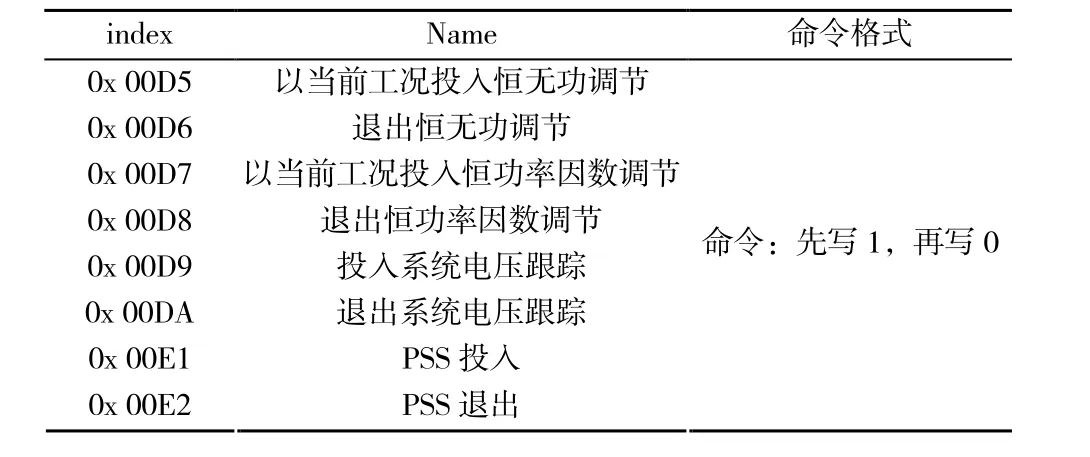
表36
4 励磁系统输出状态定义表
向监控系统提供的R0~R23定义,必须与项目电气图纸“智能IIU板原理图”中各接点的实际定义位置一致。利用专用智能IO定义程序可以灵活修改R0~R23定义。
“智能IIU板原理图”中接点定义位置与R0~R23的对应关系见表37。
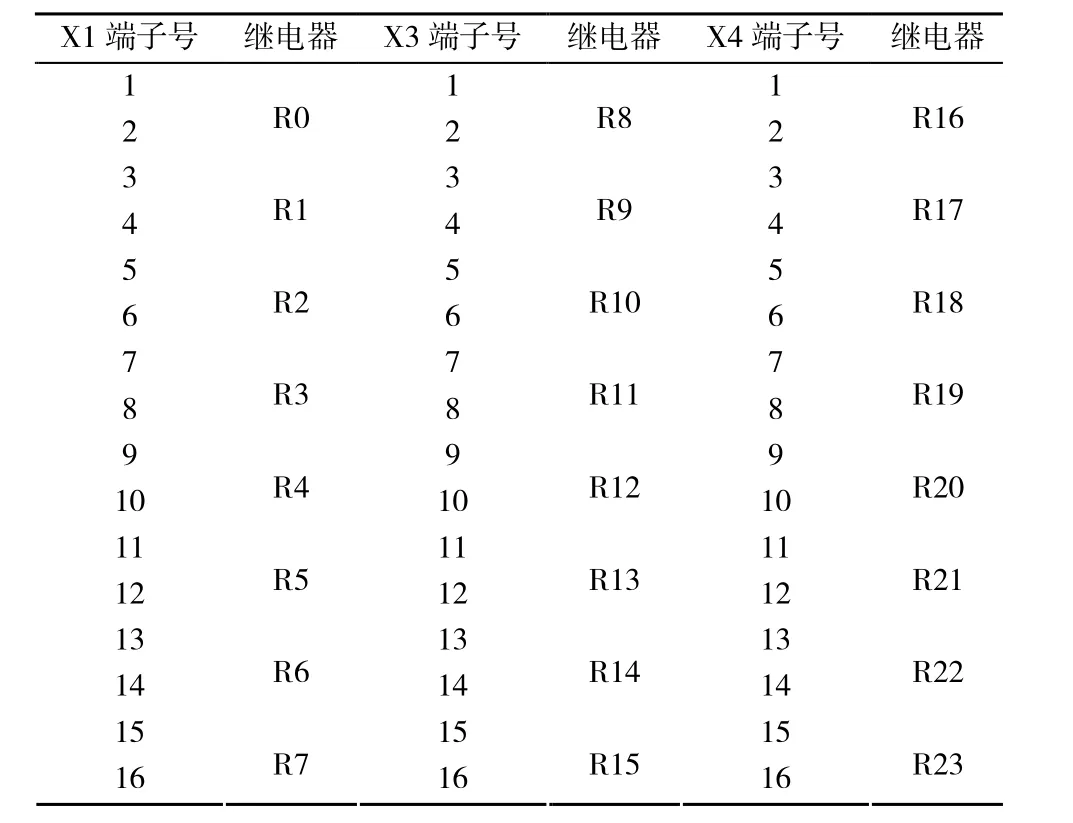
表37 励磁系统输出状态定义表
5 结束语
近几来,随着微机励磁调节器的全面进步,和监控系统LCU的连接已越来越多地采用了串行通讯的连接方式。水电站全数字式微机励磁系统中专门配置了一块智能IIU板,配置了专用的可编程芯片,用于处理与监控系统的串行通讯。根据当前电厂和监控系统的实际需求,笔者开发了MODBUS通讯协议配套的专用程序,可以MODBUS通讯规约和监控系统实现串行通讯。通讯接口硬件方式为性能先进、适用于远距离传输的RS485接口。
TV736
A
1672-5387(2016)05-0026-03
10.13599/j.cnki.11-5130.2016.05.009
2016-03-21
徐金勇(1971-),男,工程师,研究方向:水电站运行与管理。