气敏传感器的新应用
——气体源定位
2016-09-07彭倩筠国家知识产局专利局专利审查协作湖北中心湖北武汉430000长飞光纤光缆有限公司湖北武汉430000
彭倩筠,郭 倩,李 灿(.国家知识产局专利局专利审查协作湖北中心,湖北武汉,430000;.长飞光纤光缆有限公司,湖北武汉,430000)
气敏传感器的新应用
——气体源定位
彭倩筠1,郭 倩1,李 灿2
(1.国家知识产局专利局专利审查协作湖北中心,湖北武汉,430000;2.长飞光纤光缆有限公司,湖北武汉,430000)
目前,基于气体敏感材料制备出的气体传感器已经在各个领域得到了成功应用。气体源定位,作为环境领域一项新的应用方向,涉及到多学科的交叉融合,难度很大,目前还处于研究的初步阶段。但是由于其潜在的重大应用需求,必然会得到足够的重视和长足的发展。本文中,主要介绍了气敏传感器在气体源定位中应用的目的及意义,国内外研究现状,并对该领域做了分析和展望。
气体源定位;气敏传感器;移动机器人;搜寻策略
0 引言
目前,气敏传感器已经在各个领域得到了成功应用。近些年,有科学家提出将气敏传感器安装在机器人身上,使之具有嗅觉功能,进而实现对一些气体源的定位。嗅觉机器人的应用面非常广泛,特别是环境监测领域。它可以应用于剧毒和危险的工业和一般服务业等行业,例如进入毒气场,寻找毒气源,火灾源,污染源,寻找管道的泄漏点,寻找未爆炸的地雷等,灾难中搜寻伤员,探测或估算污染气体的扩散区域,甚至可以应用于航天,在其它星球上寻找未知能源等等。
1 研究现状
1.1概况
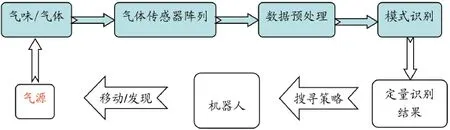
图1 机器人嗅觉定位过程示意图
嗅觉机器人嗅觉定位过程如图1所示,其为了对气体源进行定位需要将模式识别中的定量数据提供给搜寻策略,通过比较和计算告诉机器人如何移动且靠近气体源。该领域涉及到如机器人学、生物学、人工智能、传感器技术、计算机技术、湍流等众多学科,具有以下三个技术难点:(1)高敏感性和选择性的气体传感器及定量识别技术;(2)不同环境下的有效搜寻策略;(3)灵活的机器人。这三点之间是相互影响,相互制约的。高敏感性的传感器可以使机器人感知到更低浓度的气体,提高了机器人的灵敏度。传感器阵列的选择性又可以使机器人区分不同种类的气体,可以使机器人不受非定位气体的干扰。传感模块的性能是整个应用的基础,它是搜寻策略实现定位的保证和前提,也是机器人功能的体现。搜索策略又决定了能否充分利用传感器所得到的数据,在最短的时间和行走距离内找到气体源,当然它的复杂性又考验了机器人的灵活性。以下从这三个方面介绍嗅觉机器人的国内外研究现状。
1.2气体源定位传感系统
目前各种各样的气体传感器都在实验中被用于气体源定位的研究。
1.2.1金属氧化物传感器
金属氧化物传感器是一种最常用的传感器类型。Lilienthal等采用Figaro公司的金属氧化物传感器TGS 2600、TGS 2610和TGS 2620研制的MarkⅢ型移动气体传感器,它由两个“鼻孔”(或称管道)组成,每个鼻孔包括六个金属氧化物气体传感器,每三个一组分别放在管道里,每个管道还包括一个吸力风扇,用来降低传感器的恢复时间;两个管道中间安放隔板,可以保持移动鼻到浓度梯度的灵敏性。Ishida和他的同事也使用相似的传感器构造了用以指明气体源方位的气体指南针。
1.2.2石英晶体微量天平传感器
石英晶体用来充当测量气体分子重量的敏感天平。为了称重某一种气体分子,在石英表面涂一层可以“捕获”此种分子的化学涂层,例如文献[11,12]使用聚硅酮OV—17用于测量樟脑的气味。捕获的气体分子增加了石英晶体的质量从而降低它的共振频率,可用下式描述增加的质量对频率的影响:

其中,Δf代表石英共振频率的改变;f为石英共振频率;Δm代表石英晶体每单位面积增加的质量;ρ表示石英材料的密度;v代表声音在石英材料中的速度。
受到蜜蜂采蜜方式的启发,Russell等研制了基于石英晶体微量天平的气体传感系统,使用真空泵将空气与气体混合物吸入管道,增加气体与传感器的接触速度,同时在吸入管道的外面加一层出气管道作为空气窗帘向外吹气,这样传感器就避免了远距离气体的干扰。Russell还独创性的基于标签笔的原理发明了气体涂抹器,机器人携带有涂抹器就可以将气体涂抹到地面上,让其它机器人进行跟踪。
1.2.3生物传感器
蚕蛾触角的灵敏度可达到10-4ppm,比人造气体传感器高10000倍。Kuwana就发明了模拟蚕蛾触角的生物传感器(I型和II型)。Ⅰ型传感器触角的神经活动通过套环的溶液和导线提取出来,套环的溶液作为电极从触角传导电信号,溶液也可以保持触角的湿度。Ⅱ型传感器使用银电极直接插入触角的两端而不用套环。Ⅱ型传感器比Ⅰ型灵敏的多。
另外,也有少量研究者尝试使用了导电聚合物传感器和电解质传感器。但比较而言,科学家大多数还是使用金属氧化物传感器进行研究。
1.3搜寻策略
搜寻策略主要分为有风和无风两种情况,主要是通过对一些生物行为进行学习和模拟而得来的。在算法的使用上汲取了生物的化学趋向性(Chemotactic)、风趋向性(Anemotactic)及其它一些启发式搜索方法。所谓化学趋向性,是指生物依靠所获信息素的浓度梯度到达气体源,例如粘液菌(slime mold)就是采用此种方法。蚕蛾和蓝蟹则使用另一种机制,这些生物感知到气体时逆流而上,通过逆风或逆流的方向到达气体源,这就是所谓的风趋向性。
这里介绍两种典型的搜寻策略。
1.3.1六边形路径算法
它由Russell提出的真涡虫算法(Planarian algorithm)演变而来。该算法示意图如图2所示。

图2 六边形算法示意图
它通过很简单的判断程序就可以实现。
1.3.2螺旋波动定位算法
螺旋波动定位算法是由最早的蚕蛾算法演变而来。首先通过初始的向外螺旋搜索模式来发现气体源,当一个“气味包”被检测到后,机器人沿逆风向运动(波动)一段给定的距离,随后继续螺旋搜索来检测其它气味包。螺旋波动算法趋向于向一个低浓度区域波动,然后在接收另外一个气味包以前盘旋回波动的原点。当机器人在一系列相距较短的位置连续地检测到气味包,一般可判定气体源就在附近。此法的两个缺陷是:在离气体源很远的位置也可出现类似的情况;依赖强而恒定的风流信息。
1.4机器人
下面了解主要两个研究团体的成果。
1.4.1东京工业大学
1992年,Ishida和同事开始从事机器人嗅觉的研究,他们从飞蛾的行为中获得灵感,在气体搜索过程中增加了风向的信息,最初采用一个带有四个半导体气体传感器和四个电热调节器气流传感器的移动机器人。2002年,为了适应新的算法的需要,Ishida采用了第二代的烟羽跟踪机器人—GaPTR-Ⅱ,虽然它仍然采用半导体气体传感器和电热调节器气流传感器,但是他们的摆放位置发生了变化。Ishida近两年所采用的最新一代的烟羽跟踪机器人,在原有传感器的基础上又添加了CMOS数字摄像机的信息来搜索气体源。机载的处理器可以实现所有信号的采集、数据处理和电机控制等功能。
1.4.2澳大利亚莫纳西大学
Russell早期主要从事蜜蜂、蚂蚁和老鼠等动物的嗅觉定位方法的研究;2003年以来,他开始研究可以通过挖掘洞穴从而找到化学源头的机器人系统。他们采用MOLEⅠ移动机器人结合hex-path算法以一定的次序往地下插入探头,读取地下物质化学浓度,搜索位于地下的气体源。为了不陷入散沙中,MOLE移动机器人没有采用常规的轮式或履带运动方式,而是采用了独特的“腿”的设计。整个机器人由三条腿实现运动功能,一个位于底部的气体传感器探头探测沙子下面的酒精。探头所使用的传感器是Figaro公司的TGS2600,它可以响应低于1ppm的酒精,探头可探测到地下2cm的位置。
2 展望
对于金属氧化物半导体( MOS)气 体传感器:目前的金属氧化物传感器不能区别相似的气体(如TGS822对乙醇、甲烷、苯、一氧化碳和丙酮等均具有相似的输出),因此很难跟踪一种指定的气体。此外,:金属氧化物传感器的反应及恢复时间较长,因此在实时操作过程中,很难假设先后的各个传感器读数是条件独立的,对搜索策略会造成影响。所以建立新的动力学模型来提取特征和快速识别的研究将具有重大的价值。
搜寻策略方面,目前很少有科学家在静态无风或微风的环境下开展研究。在此种情况下,由于气体分子的分布主要受空气湍流的影响,烟羽分布没有固定的形状,因此相比有风的情况气体定位要困难得多,但此环境显然更具有意义。
基于多机器人群体智能方式,采用分布式搜索策略,能大大提高搜索的能力,降低搜索所需要的时间,这将是主动嗅觉发展的必然趋势。
[1] Ishida H, Nakamoto T, Moriizumi T. Fundamental study of mobile system for smelling-object localization using plural gas sensor.SICE’93, proceedings of the 32nd SICE Annual Conference, International Session. Kanazawa, Japan: IEEE Industrial Electrics Society,1993:767-768.
[2] Hiroshi Ishida, Yukihiko Kagawa, Takamichi Nakamoto,Toyosaka Moriizumi. Odor-source Localization in the Clean Room by an Autonomous Mobile Sensing System. Sensors and Actuators.1996 B 33:115~121
[3] Lino Marques, Anibal T.de Almeida. Electronic Nose-Based Odour Source Localization. IEEE.2000:36~40
[4] Hiroshi Ishida, Takamichi Nakamoto and Toyosaka Moriizumi. Remote Sensing and Localiztion of Gas Source and Distribution Using Mobile Sensing System. IEEE.1997:559~562
[5] Frank W.Grasso,Jelle Atema. Integration of Flow and Chemical Sensing for Guidance of Autonomous Marine Robots in Turbulent Flows. Environmental Fluid Mechanics.2002, 2:95~114
[6] Lilienthal A, Duckett T.A stereo electronic nose for a mobile inspection robot.ROSE'03.1st International Workshop on Robotic Sensing.USA:IEEE, 2003:1~6.
[7] Ishida H, Nakamoto T, Moriizumi T. Study of odor compass. IEEE/SICE/RSJ International Conference on Multisensor Fusion and Integration for Intelligent Systems.Washington, DC, USA: IEEE, 1996.222~226.
[8] Ishida H, Kobayashi A, Nakamoto T,et al. Threedimensional odor compass. IEEE Transactions on Robotics and Automation, 1999, 15(2):251~257.
[9] Russell R A, Kleeman L, Kennedy S. Using volatile chemicals to help locate targets in complex environments. Proceeding of the Australian Conference on Robotics and Automation.Melbourne: ARAA,2000.87~91.
[10] Russell R A, Thiel D, Mackay-Sim A. Sensing odor trails for mobile robot navigation. Proceedings of the IEEE International Conference on Robotics and Automation. USA: IEEE, 1994.2672~2677.
[11] Kuwana Y, Shimoyama I, Miura H. Steering control of a mobile robot using insect antennae. Proceedings of the 1995 IEEE/RSJ International Conference on Intelligent Robots and Systems.USA: IEEE, 1995.530~535.
[12] Kuwana Y, Shimoyama I, Sayama Y. Synthesis of pheromone-oriented emergent behavior of a silkworm moth. Proceeding of the 1996 IEEE/RSJ International Conference on Intelligent Robots and Systems.USA:IEEE, 1996.1722~1729.
[13] Kazadi S, Goodman R, Tsikata D. An autonomous water vapor plume tracking robot using passive resistive polymer sensors. Autonomous Robots, 2000,9(2):175~188.
[14] Hayes A T, Martinoli A, Goodman R M. Swarm robotic odor localization. Proceeding of the IEEE/RSJ International Conference on Intelligent Robots and Systems.USA: IEEE, 2001.1073~1078.
[15] Hayes A T, Martinoli A, Goodman R M. Distributed odor source localization. IEEE Sensors Journal, 2002,2(3):260~271.
[16] Ishida H, Nakayama G, Nakamoto T,et al. Controlling a gas/odor plume-tracking robot based on transient responses of gas sensors. Proceedings of the IEEE International Conference on Sensors.USA: IEEE, 2002:1665~1670.
[17] Ishida H, Tanaka H, Taniguchi H,et al. Mobile robot navigation using vision and olfaction to search for a gas/odor source. Proceeding of the International Conference on Intelligent Robots and Systems.2004,Volume 1,313~318.
[18] Russell R A, A Ground-Penetrating Robot for Underground Chemical Source Location. Proceeding of the international Conference on Intelligent Robots and Systems, 2005, 1879~1884.
The new application of gas sensor——gas-source localization
Peng Qianjun1,Guo Qian1,Li Can2
(1.Patent Examination Cooperation Hubei Center of The Patent Office,Wuhan Hubei,430000;2.Yangtze optical fiber and cable joint stock company limited,Wuhan Hubei,430000)
In this paper,a new application of gas senor for gas/odor source localization is introduced,included its aim and significance.The researching actuality is detailed presentation.The problems of activity olfaction are pointed out at the end.
gas-source localization;gas sensor;mobile robot;localization strategy
注:本文第二作者(郭倩)对文章贡献等同第一作者。
