无人机航空摄影在新农村建设中的应用初探*
2016-09-06陈蓉王博
陈 蓉 王 博
(1.武汉交通职业学院,湖北 武汉 430065; 2.湖北省测绘质量监督检查站,湖北 武汉 430074)
无人机航空摄影在新农村建设中的应用初探*
陈蓉1王博2
(1.武汉交通职业学院,湖北武汉430065; 2.湖北省测绘质量监督检查站,湖北武汉430074)
新农村摄影作业面积小,传统的大飞机加航摄相机作业成本高,且作业窗口时间少,无人机航测系统作业方式灵活、成本低,更适宜于新农村摄影作业中。文章针对无人机航摄系统在新农村建设工作中的实际困难,对无人机航测系统的航线设计、航拍质量管理以及内业作业流程等方面进行了改进,总结出了一套更高效的无人机航摄影像的内业作业流程。
无人机;低空航测;新农村建设;航空摄影
随着科学技术的快速发展,无人飞行器越来越成熟,将无人飞行器作为航空摄影测量平台成为近几年兴起的技术手段。完整的无人机遥感系统主要由无人飞行器、飞控系统、任务传感器、无线通讯系统、地面控制站等六个部分组成。无人机搭载数码相机及其他设备组成的航测系统,相对于有人驾驶飞机来说,具有机动、经济、可云下摄影、可获取高分辨率影像等优点。因此,无人机航测系统在地形图测绘、地质灾害调查、土地利用动态监测、应急测绘、地理国情补充影像等领域可发挥巨大的作用。[1-6]无人机航测技术现已成为国内外研究的热点,逐渐从研究开发阶段发展到了应用阶段。国家测绘地理信息局将无人机航摄系统纳入测绘地理信息科技发展“十二五”规划,近几年在大力推广无人机航摄系统,现在各个直属局和地方局基本上都拥有了自己的无人机航摄队伍。无人机航摄系统在国民经济建设和应急救灾中起着越来越重要的作用。
测绘成果作为国家基础性、公益性、战略性的地理信息资源,在新农村建设中具有迫切的需求,尤其是1∶2000、1∶1000及更大比例尺的4D产品。通过地理信息的及时更新、识别、收集,对规划、决策实施结果进行监督、测量,从而全面保障农业的科学和可持续发展。农村地区缺少高分辨率的遥感影像,使得遥感技术在新农村建设中应用受到限制。由于新农村作业面积在10平方公里到50平方公里不等,使用传统的大飞机加航摄相机作业成本高,且作业窗口时间少。无人机航摄系统相对于传统的大飞机航摄系统和新兴的卫星遥感,具有机动灵活、响应快、使用维护成本低、可获取高分辨率遥感影像等特点。因此,无人机航测系统成为新农村建设应用中更佳的选择。本文系统地阐述了无人机在新农村建设中的获取地理空间信息的应用,主要包括无人机影像获取、内业数据处理与分析等内容。
1 无人机航测系统航片获取
在无人机航测任务下达后,作业人员需要完成任务分析、任务规划、飞行准备、外场作业、数据整理、成果提交这几个任务。综合考虑任务要求、气象、安全、测区地形等各种条件,设计出最优的飞行路线,以保证圆满地完成飞行任务。通过合理的航线设计,可以缩短任务时间、节约燃油、快速获取目标区域数据 ,[7]原始航片获取后,需进行一系列处理才能给后期航测成图使用,具体流程图见图1。

图1 无人机航片获取流程图
1.1起降场的选择
无人机起降场要求地势平坦,场地周围没有明显障碍物、高建筑物或者移动通信塔等。在室内前期资料准备中,可以利用GOOGLE EARTH或者天地图的卫星影像,熟悉整个测区的情况,并且选取一个主要的起降场和几个备用的起降场。最后在实地踏勘的时候,综合各方面因素,选择合适的起降场。
1.2航线设计
如今,不少无人机航测系统的航线规划不考虑测区地形起伏,但是无人机飞行高度低,同时湖北省乡镇区域很多是丘陵或者山区,会导致飞行的数据比例尺差异很大,因此将测区的数字高程模型(DEM)考虑进航线规划是很有必要的。任务下达后,根据任务需要的影像分辨率,可以由公式(1)计算出飞行的最大相对高度。
(1)
其中,p为像素大小,单位为毫米(mm),f为焦距,单位为毫米(mm),GSD为地面分辨率,单位为米(m), H为飞行最大相对高度高度单位为米(m)。
传统的航空摄影测量,要求航向重叠度为不小于60%,旁向重叠度不小于30%,飞机的姿态角控制在±3°内,而无人机姿态不易控制。我们通过多个项目的实施发现,为了保证无人机航摄影像的质量,最好要求其航向重叠度为 70-85%,旁向重叠度为 35-55%。无人机航空摄影惯例做法为等距曝光,但是由于无人机飞行高度低,如果同一个测区内,地势高差大的话,会导致影像的地面分辨率差异较大,可能使得影像的地面分辨率达不到要求。如果通过测区的DEM、影像分辨率确定无人机飞行的大地高,进而确定曝光点位,可在一定程度上解决此问题。
1.3航拍质量管理
获得质量合格的航摄像片,是进行航空摄影测量的重要前提。航片完整覆盖航测区域、航片质量合格,才能进行下一步工序。无人机航拍质量的检查包括三个方面:无人机飞行姿态是否符合标准,相机在预定曝光点是否曝光,航向和旁向重叠度是否满足设计要求。无人机在工作时候会以一定时间间隔(一般为几秒)将飞行的高度、发动机的转速等情况通过通讯系统传输给地面监测系统,地面工作人员通过系统界面时刻注意无人机飞行状况。影像的重叠度则主要由人工检查的方式进行检查,正常情况下如果地面监控站监测数据证实飞机飞行过程中无异常,设计的航向与旁向重叠度足以满足需求。
1.4数据整理
对数据的整理包括GPS/IMU数据整理,影像畸变差改正及影像格式转化。GPS/IMU数据可以辅助空中三角测量,大量减少像控点。[8]无人机影像上一般安装的是普通单反相机,因此需要对相机进行检校,利用获得的检校参数对影像进行改正。影像格式转化则是为了方便后期空三软件的使用。将这些任务完成后,经检查合格,可将成果提交,开始后期的像控工作和数据处理工作。
2 无人机航摄影像处理及应用
无人机航摄影像处理及应用包括影像拼接、空中三角测量、数字高程模型(DEM)和正射影像(DOM)的制作、数字线划图(DLG)的绘制等内容。[9]一般来说,生产单位在获取影像后,利用冲洗的像片在室内选像控点,之后再做外业像控。新农村建设中,航测作业范围在乡镇中心,范围在50平方公里以下。但是由于无人机影像像幅小,即使较小测区,其影像数量也较多。利用单张的影像选取像控点工作比较繁乱,可利用快速拼图软件,快速获得该测区的拼图,然后进行像控点的设计与布设。新农村建设项目有别于灾害应急等快速响应项目,基于众多经验,可将目前的内业作业流程设计如图2:
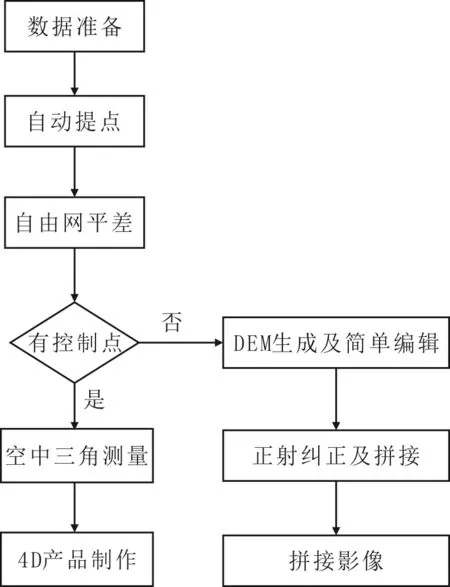
图2 内业作业流程
2.1影像拼接
影像合成是实现拼接影像信息一致性的关键步骤,由于无人机影像辐射信息差异明显,影像存在配准误差,并且没有考虑地形起伏的影响,因此影像合成时存在“融合鬼影”现象,而现有的融合策略难以很好解决,这也是现在研究的一个热点问题。
湖北省丘陵及山地较多,以目前完成的新农村建设项目来说,每个乡镇测区基本上处于丘陵地带,用现有的快速拼图软件获得的全景影像错位在像素级。按照上述流程,在外业像控完成之前,可以得到该区域的拼接影像。拼接影像可用于像控布点、控制测量工作底图、灾害应急救援、普通挂图等。同时,在外业作业期间,内业处理人员可以将空三中提点步骤完成,提高了工作效率。图3、4分别为湖北省某乡镇的全景影像图和局部放大图。可以看到,通过本文的工作流程,可以在保证质量的前提下,更为快速地形成成果,提高了工作效率。

图3 湖北省某乡镇的全景影像图

图4 局部放大图
2.2空中三角测量
非量测相机和像幅较小、影像数量多、影像的倾斜度大、重叠度不规则及相邻影像间的比例尺差异大等问题,这些都是处理无人机影像所要解决的问题。因此,对于无人机航摄影像,传统的空三系统无法自动完成,主要原因是无法完成影像的自动量测。如今众多商业的摄影测量系统都加入了无人机模块,国内和国外比较有代表性的有PixGrid系统、DPGrid系统和Inpho系统。在PixGrid系统无人机模块中,应用了SIFT算子,用于解决部分旋角过大的无人机影像难以寻找同名点的问题;[10]DPGrid系统则可以完成非常规航线的影像处理;[11]Inpho系统的优势则在于可以快速的完成各种影像的自动空三,适合数据的快速处理。通过大量的工程项目表明,采用国产软件的无人机空三模块或者国外摄影测量软件Inpho处理无人机影像,基本可以完成无人机航摄影像的自动量测,其空三结果也可以满足内业作业的要求。
2.34D产品制作
4D产品包括DEM(数字高程模型)、DLG(数字线划图)、DOM(数字正射影像)、DRG(数字栅格图)。本文以DEM和DOM产品为例,说明无人机航测在新农村建设中的应用。一般流程中,经过采集数据、定向建模、构建TIN、接边镶嵌等技术环节生成DEM,在新农村建设项目中,由于无人机影像的大重叠度,制作DOM时可将每张像片的中心区域作为DOM的原始像片源,影像投影差小,更趋近与正射投影。对于为满足DOM快速制作的需要而生成的DEM,除了有高楼或者明显地物的重点区域必须手工编辑,一般可以直接利用软件直接生成。图5为某乡镇的产品成果,我们可以发现,基于无人机影像利用软件自动生成DEM和DOM,在保证精度的条件下,减少了人力消耗。

图5 3D产品成果
3 结语
无人机航摄系统作业方式灵活、成本低,使其在小范围航测作业的应用越来越广泛。经过大量的生产实践表明,无人机航摄系统可满足新农村建设中获取地理空间信息的需要,同时也降低了生产成本,提高了工作效率。但在工作过程中,我们也发现无人机在应用过程中存在一些问题有待解决。例如,即使较小测区,无人机影像像片数量也较多,这为后期的空三和测图带来了不少挑战。笔者针对这些困难,对无人机航测系统的航线设计、航拍质量管理以及内业作业流程等方面进行了改进,总结出了一套更高效、高质量的无人机航摄影像的内业作业流程,且将该无人机内业操作程序应用在湖北省的新农村建设项目中,取得了实际成效。
[1]吕厚谊. 无人机发展与无人机技术[J].世界科技研究与发展,1998(6):113-116.
[2]孙杰,林宗坚,崔红霞.无人机低空遥感检测系统[J].遥感信息,2003(1):49-50.
[3]戴斌. 航空摄影测量在土地利用现状更新调查中的应用[J]. 铁道勘察,2005(6):24-27.
[4]Ming Li, Deren Li, Dengke F. A Study on Automatic UAV Image Mosaic Method for Paroxysmal Disaster[C]// International Society for Photogrammetry and Remote Sensing. Remote Sensing and Spatial Information Sciences .Göttingen:copermius Pubhcations, 2012.
[5]吕书强,晏磊,张兵,等.无人机遥感系统的集成于飞行试验研究[J].测绘科学,2007(1):84-87.
[6]张祖勋,张剑清.数字摄影测量学[M].武汉:武汉测绘科技大学出版社,1997.
[7]陈大平.测绘型无人机系统任务规划与数据处理研究[D].解放军信息工程大学,2011.
[8]袁修孝,高宇,邹小容.GPS辅助空中三角测量在低空航测大比例尺地形测图中的应用[J].武汉大学学报(信息科学版),2012(11):1289-1293.
[9]张剑清,潘励,王树根. 摄影测量学[M].武汉大学出版社,2003.
[10]王琳.高精度、高可靠的无人机影像全自动相对定向及模型连接研究[D].中国测绘科学研究院,2011.
[11]张祖勋,郭大海,柯涛,等.抗震救灾中航空摄影测量的应急响应[J].2008(6):853-857.
2015-11-12
武汉交通职业学院校级项目“工程测量专业专本贯通教学模式研究”(编号:q2015001)
陈蓉(1988-),女,湖北安陆人,武汉交通职业学院交通工程学院教师,主要从事低空摄影测量及工程测量研究。王博(1988-),男,湖北阳新人,湖北省测绘质量监督检验站工程师,主要从事低空摄影测量及测绘产品质量评价研究。
10.3969/j.issn.1672-9846.2016.01.020
P231
A
1672-9846(2016)01-0086-04
