静止变频起动器低频阶段起动控制方法的研究
2016-09-06邵燕秋邵宜祥王小红杨合民简优宗
邵燕秋 邵宜祥 王小红 杨合民 简优宗
(国网电力科学研究院,南京 211000)
静止变频起动器低频阶段起动控制方法的研究
邵燕秋邵宜祥王小红杨合民简优宗
(国网电力科学研究院,南京 211000)
目前抽水蓄能机组和燃气轮机组一般采用静止变频起动方式。在静止变频起动的低频阶段,机端电压很小且畸变严重的情况,针对这一情况,研究了一种基于机组起动恒加速度的开环控制方法。在理论分析的基础上进行了PSCAD和RTDS仿真,并在动模实验平台上进行了动模实验,证明了该方法在理论上是正确的,在工程上是可行的。
静止变频起动;低频阶段;恒加速度;开环控制;仿真;动模实验
抽水蓄能机组和燃气轮机组的起动方式是电站电气设计时需要考虑的重要问题之一。随着机组向大容量方向发展,传统的电动机起动电流越来越大,会对机组和电网都造成巨大的冲击危害,使得机组本身承受的机械冲击、热冲击以及电网的瞬时电压降都超过限度。在抽水蓄能电站及燃气电站自动控制系统及成套设备中,静止变频器对于保证大型抽水蓄能机组及燃气轮机组的快速起动和稳定运行具有重要的意义[1]。
静止变频起动器的负载是同步电动机,根据机端电压频率的不同,静止变频起动分为初始静止阶段、低频阶段和中高频阶段。其中低频阶段是指定子三相电压的频率低于0.5Hz,即转速低于30r/min。此时转子虽然开始转动,但由于机端电压非常微弱,定、转子电流因转子位置变化而引起的变化量非常小,无法从测量相关电气量方面得到转子位置信号以决定变频器的通电方式和控制模式。低频阶段的起动控制是静止变频起动中的技术难点,制约着静止变频起动技术的发展。传统的方法是在电动机的转子上安装位置传感器,根据转子位置决定变频器的控制模式。但安装位置传感器会增加系统的复杂程度和安装、调试及维护的工作量,降低系统的可靠性,在工作条件恶劣时更为严重。
1 低频阶段起动控制原理
根据转子的运动方程:

式中,J为机组转动惯量;rω为转子角速度;eT为变频器提供的驱动力矩;LT为机组阻力矩。
变频器提供的驱动力矩表达式为

式中,eC为常数;si为定子电流,由变频器提供,选择合适的触发角,可以使其为常数;Φ为转子磁通,由励磁系统提供的励磁电流决定,在此转速范围内,Φ的幅值保持不变,所以eT在此转速范围内为常数。而在频率低于0.5Hz时,可近似认为阻力矩LT为常数[2]。
从而可得式(3)至式(6):
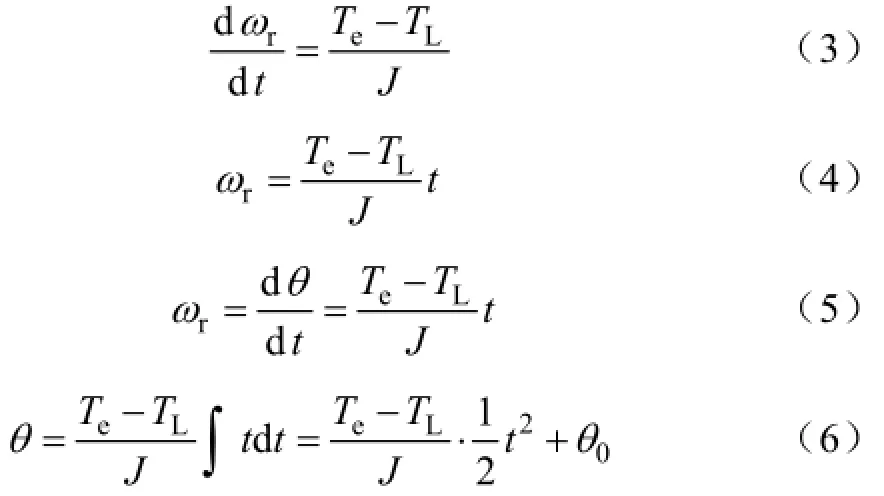
根据式(6),可以估算出电动机定子电压的频率低于0.5Hz时,不同时刻转子的位置。而检测出转子位置的目的是为了确定何时给变频器的逆变桥施加触发脉冲,以及给哪两个逆变桥施加触发脉冲。而在转子初始位置检测结束后,已经能确定给哪两个晶闸管发第一组触发脉冲,而正常情况下,晶闸管的导通顺序是固定的,因此在这个阶段只要计算出给逆变桥施加触发脉冲的时刻,就能步进式地使转子转速平滑上升[3]。这就是静止变频起动器在低频阶段采用的基于机组起动恒加速度的开环控制方法的原理。
2 具体实现
关于给逆变桥晶闸管施加触发脉冲的时刻的计算方法如下。
1)逆变桥第一组触发脉冲的确定:
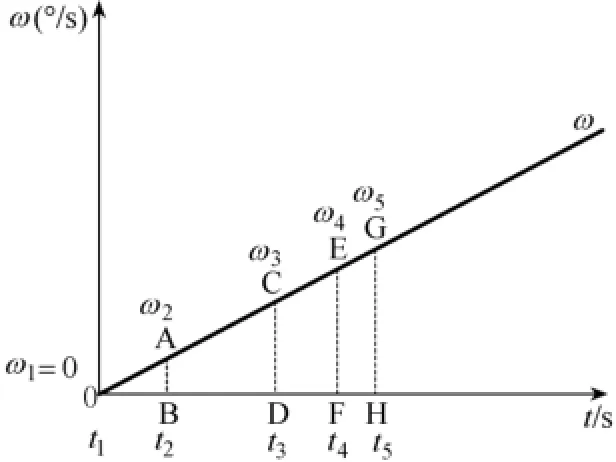
图1 低频阶段电动机角速度曲线示意图
设在t=t0时刻,变频器解锁,转子初始速度ω=ω0=0rad/s ,转子位置为转子静止时的初始位置θ0,可以通过相关电气检测方法计算得到,因此有:θ1=θ0,然后依据使电动机在该初始位置获得最大的起动加速度的原则给逆变桥相应的晶闸管施加触发脉冲,驱动电动机旋转。
2)逆变桥第二组触发脉冲的确定:
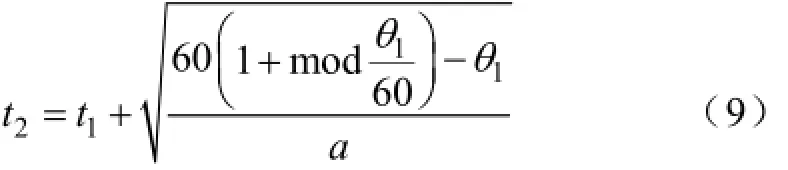
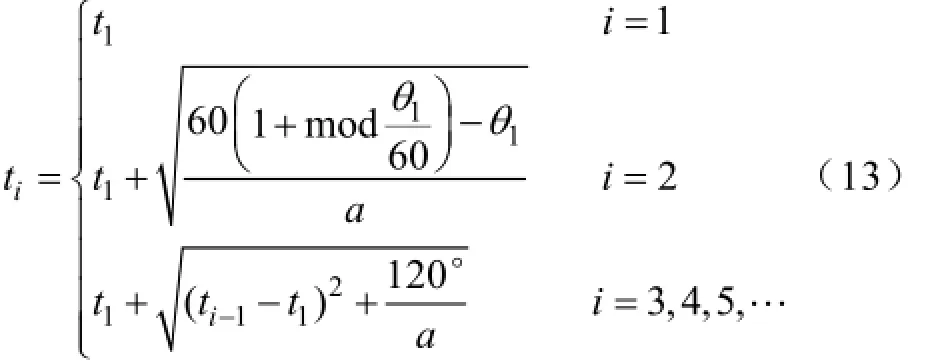
第二组触发脉冲的正确给定是电动机能否在低频阶段成功起动的关键。因为转子初始位置的不确定性,导致第二组触发脉冲与第一组触发脉冲之间,转子扫过的电角度从0°到60°都有可能。而换相时转子电角度为60°的整数倍,因此在已知转子初始位置时,发第二组触发脉冲时,转子位置角2θ可以用式(7)表示:
经常关注《试验方案》下发单位的网站动态信息,下载并仔细阅读《试验方案》,明确本单位承担的试验组别、类型、组数、试验品种数量等相关信息。

式中,mod表示整除所得商的整数部分,1θ为发第一组触发脉冲时的转子位置角,即转子的初始位置角,2θ为发第二组触发脉冲时的转子位置角。
由图1可知三角形AOB的面积AOBS为

由式(7)和式(8)可得逆变桥第二组触发脉冲的时刻为
3)逆变桥第三组触发脉冲的确定:
逆变桥由第二组触发脉冲时刻的转子位置θ2转过60°后,即到达第二次换相点,需要对逆变桥发第三组触发脉冲。由图1可知梯形ABCD的面积SABCD为
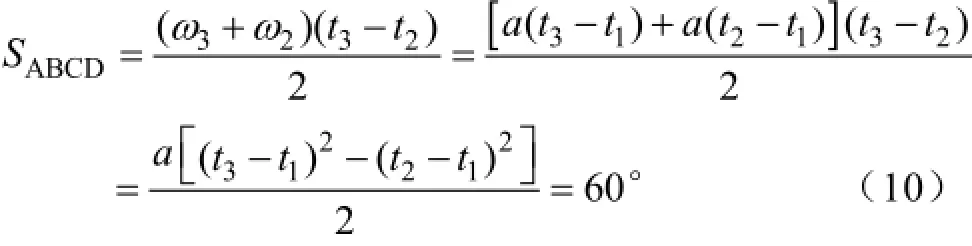
可得逆变桥第三组触发脉冲的时刻为

4)逆变桥第i组触发脉冲的确定:
同理,由前面的推导可得

这样,便确定了低频阶段给逆变桥晶闸管施加触发时刻的时刻,按照预定的顺序给相应的晶闸管施加触发脉冲,便可以完成同步电动机在低频阶段的起动控制。
3 PSCAD和RTDS仿真验证
在PSCAD中搭建的逆变桥和电动机模型如图2所示。若晶闸管按照图2所示来编号,则晶闸管的导通顺序为(T6和T1)→(T1和T2)→(T2和T3)→(T3和T4)→(T4和T5)→(T5和T6)→(T6和T1)…逆变桥通常是两个晶闸管同时导通,只有在换相过程中才会出现3个晶闸管同时导通的现象[4]。
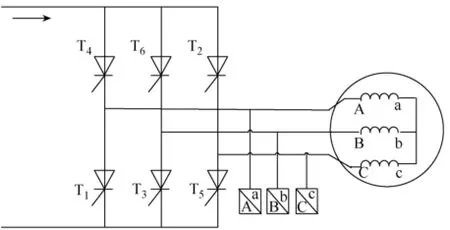
图2 静止变频起动器中的逆变桥和电动机模型
为了便于描述,对于一个晶闸管的开关状态用一个二进制的编码来表示,见表1。这个二进制的第一位表示晶闸管T6的状态,最后一位表示晶闸管T1的状态,其它位代表的晶闸管依次类推。某位为“1”表示该位对应的晶闸管导通,为“0”表示该位对应的晶闸管关断。这个二进制编码直观地表示了6个晶闸管的导通与关断情况。为了便于观察,将6位二进制编码转化为十进制编码。
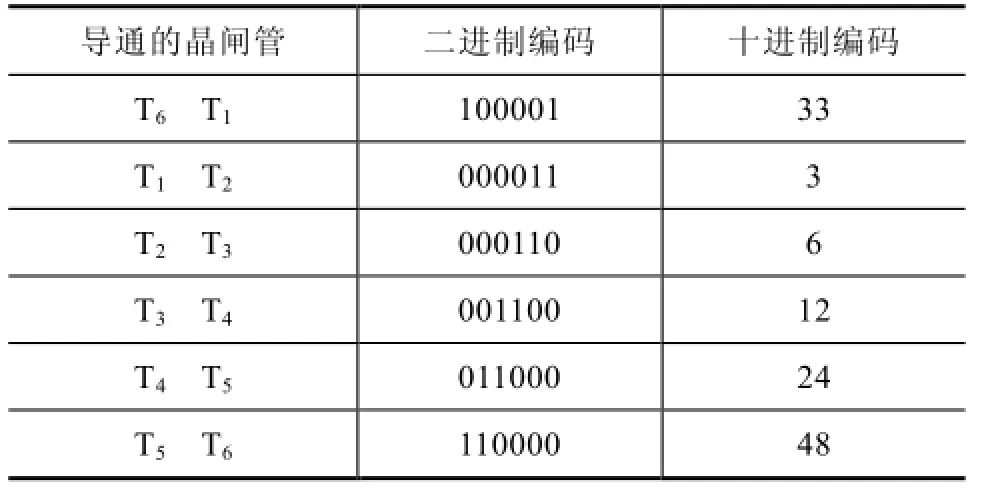
表1 晶闸管的二进制和十进制编码
采用前面介绍的估算逆变桥晶闸管换相时刻的方法,得到转子旋转一周的范围内对应导通的晶闸管,如图3所示。因为在换相过程中会出现三个晶闸管同时导通的现象,为了输出非换相时候导通的晶闸管,需要对逆变桥三相电流进行采样,当某相电流的绝对值小于某一个基准时,说明该相对应的两个晶闸管都没有导通;当某相电流的绝对值大于某一个基准值时,说明该相两个晶闸管中有一个晶闸管导通,至于导通的是上桥臂的晶闸管还是下桥臂的晶闸管,可以根据采样电流的方向来判断。以图2所示的电流方向为例,电流为正表示导通的是上桥臂的晶闸管,电流为负表示导通的是下桥臂的晶闸管。

图3 转子旋转一周的范围内对应导通的晶闸管
从图3中可以看出,逆变桥的晶闸管按照表1所示的顺序轮流导通,且导通间隔越来越短,说明电动机的转速在逐渐升高。
图4为在低频阶段转子旋转一周时的电角度,图5为在此时间段内电动机转速与时间的关系。两条曲线的形状几乎是一样的,都是以一定的加速度上升。
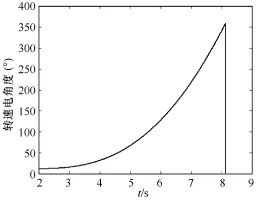
图4 转子旋转一周的范围内转子的实时位置
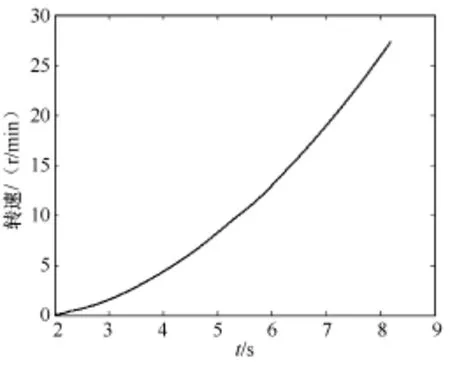
图5 转子旋转一周的范围内电动机转速与时间的关系
图4、图5表明电动机转速在平稳上升,说明采用上述估算换相时刻,给逆变桥应该导通的晶闸管施加触发脉冲的方法在理论上是正确的。
图6为采用上述方法在RTDS仿真中录波得到的转速和转子位置波形。
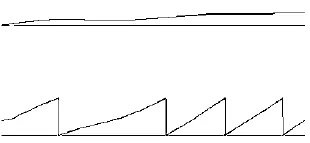
图6 RTDS仿真得到的转速与转子位置波形
图6中,第一条曲线为电动机的转速波形,第二条曲线为转子实时位置波形。转子从145°的初始位置开始旋转,转子位置曲线和转速都比较平滑,说明上述方法能够使电动机转子在低频阶段平稳旋转,也说明该方法在工程上是可行的。
理论分析及PSCAD和RTDS仿真结果都表明:在低频阶段采用的基于机组起动恒加速度的开环控制方法在理论上是正确的,在工程上也是可行的。
4 动态模拟实验验证
低频阶段采用基于机组起动恒加速度的开环控制方法,即前文研究的估算逆变桥晶闸管触发脉冲的时刻,然后按照一定的顺序给逆变桥晶闸管施加触发脉冲,步进式地使电动机升速。低频阶段的动态模拟实验波形如图7所示。

图7 低频阶段实验波形
图7中第一条曲线为转子实时位置波形,第二条曲线为直流电流波形。由第一条曲线发现:在给逆变桥的晶闸管发第三组触发脉冲之前,转子共出现一次停顿和一次抖动现象,该现象是由动态模拟实验室采用的电动机容量较小,而转子剩磁又比较大的原因造成的。工程中的大型同步电动机容量都很大,因此在变频起动的低频阶段不会出现转子停顿和抖动现象。该结论已在潘家口抽水蓄能电站的抽水蓄能机组的变频起动中得到证实。
经过大量的动模实验发现,尽管在低频阶段转子实时位置会受到转子剩磁的影响,但却未出现因剩磁问题导致电动机起动失败的现象,因此可以暂时忽略转子剩磁的影响。当不考虑转子剩磁对前两次换相时转子位置波动的影响时,在低频阶段,转子位置曲线和直流电流曲线都比较平滑,且转子旋转一周所用的时间和相邻两次晶闸管换相的间隔都越来越短,说明电动机在平稳升速,也说明低频阶段采用恒加速度的开环控制方法在机组起动过程中发挥了很好的作用。前述的低频阶段起动控制方法在实际系统中是可行的。
5 结论
对低频阶段的起动控制方法进行了理论分析和仿真验证,最后在动模实验平台上进行了动模实验验证,说明了该方法在理论上是正确的,在工程上也是可行的。关于静止变频起动低频阶段起动控制的相关文献较少,本文是对以往文献的补充,也为变频起动技术的进一步发展提供了技术支撑,同时为变频起动器的国产化制造奠定了基础。
[1] 方军民. 抽水蓄能机组变频启动技术介绍[J]. 水电
站机电技术, 2012, 35(2): 17-19, 64.
[2] 李崇鉴. 交流同步电动机调速系统[M]. 北京: 科学出版社, 2006.
[3] 李志民, 张遇杰. 同步电动机调速系统[M]. 北京:机械工业出版社, 1996.
[4] 黄俊, 王兆安. 电力电子变流技术[M]. 北京: 中国劳动社会保障出版社, 2012.
The Control Method of the Static Frequency Converter in the Low Frequency Period
Shao Yanqiu Shao Yixiang Wang Xiaohong Yang Hemin Jian Youzong
(State Grid Electric Power Research Institute, Nanjing 211000)
At present, static frequency converter is usually used for pump/motor and gas turbine starting. The synchronous machine's voltage is small and distorted seriously in the low frequency period,an open loop control method based on constant acceleration is put forward. PSCAD and RTDS simulation verification test and dynamic simulation experiment has been done based on the theoretical analysis, which verified the theoretical correctness and the engineering feasibility of the method.
static frequency converter; low frequency period; constant acceleration; open loop control method; simulation; dynamic simulation experiment
邵燕秋(1987-),女,硕士研究生,主要研究方向:大型同步电动机静止变频启动技术。
