CA6150柔性刀架设计及静动特性分析
2016-09-05郭茫茫
徐 彬,杨 静,郭茫茫
(西安理工大学 机械与精密仪器工程学院,陕西 西安 710048)
CA6150柔性刀架设计及静动特性分析
徐彬,杨静,郭茫茫
(西安理工大学 机械与精密仪器工程学院,陕西 西安 710048)
车削振动主动控制中,考虑到车削加工中刀架的受力以及控制执行器的性能特点,刀架设计至关重要。为了减小径向载荷对执行器的作用,本文利用柔性铰链设计了CA6150柔性专用刀架,在此基础上,分析了专用刀架的静、动特性,表明该结构达到设计要求,并通过脉冲激励实验证明了刀架具有较好的动特性,可以满足CA6150车削振动主动控制的要求。
车削振动;柔性铰链;专用刀架;静动特性
高速车削加工中,刀具相对工件的振动,会导致刀具磨损,影响加工精度,严重时甚至引起崩刀[1],因此车削振动的主动控制成了研究热点[2]。振动主动控制的基本原理是通过传感器采集振动信号,通过控制器施加主动控制力抑制振动。对车削振动的主动控制,一般是先通过特殊结构使刀架相对机床床身产生振动,然后通过传感器、执行器对刀架施加主动控制力以抑制车削刀架振动。整个控制系统中,刀架结构的设计至关重要。
然而,现有的研究报道主要关注系统的控制算法以及驱动器设计[1-3],对于刀架设计的研究却很少。李晓舟在铣削振动控制中则采用了延长杆的结构[6];江浩等设计了基于柔性铰链的主动减振铣削平台,对平台进行了仿真分析[5]。车削振动主动控制中常用压电致动器、磁致动器等作为执行器,根据工作原理它们一般不能承受径向力。然而,车削加工中,车刀同时承受背向力、主切削力以及进给力。现有的柔性刀架结构却没有考虑各方向切削力对执行器径向的作用,如文献[4]设计了基于压电致动器的车削振动柔性刀架,就没有考虑进给力Ff给致动器带来的径向负载。柔性铰链具有体积小、无间隙、无机械摩擦、定位精度高、冲击小等优点,在微进给等一些机构中得到广泛应用。本文设计了基于柔性铰链的CA6150柔性刀架,通过结构设计,减小车削力对致动器的径向力作用,并对专用刀架静、动特性进行理论了分析及测试。
1 柔性刀架结构设计
在车削加工中车刀受主切削力Fc、背向力Fp、进给力Ff的作用而产生振动。根据CA6150机床刀座结构,设计了如图1所示的柔性刀架,由12个直圆型柔性铰链和2个直梁型柔性铰链组成,x、y、z为车削加工工作坐标轴,铰链编号如图2所示。

图1 柔性刀架结构示意图Fig.1 The structure diagram of flexible hinge

图2 柔性铰链编号Fig.2 Straight round flexure hinge number
在振动控制中,执行器控制力Fz沿轴向z作用在刀架的“执行器连接部位”,抑制刀架z向振动。为了避免执行器受径向力,图1的柔性刀架结构中,“车刀夹持部位”与“执行器连接部位”之间有4个直圆型柔性铰链单元,在车削背向力Fp的作用下,直圆型柔性铰链1~8和直梁型柔性铰链13、14在x方向上发生扭转变形;在进给力Ff的作用下,直圆型柔性铰链9~12在y方向上发生扭转变形,从而避免执行器受径向变形的作用。
2 刀架静态特性分析
刚度是影响结构振动和变形的主要因素。图1的柔性刀架在z方向上的刚度为直圆型铰链和直梁型铰链的刚度和,图3为两种单元的几何结构示意图。背向切削力Fp作用下,直圆型铰链转动刚度Kαz由文献[7]可得。

图3 柔性铰链的几何结构Fig.3 The flexible hinge of dimensims

(1)
式中,弹性模量E=2.06e11Pa、剪切弹性模量G=E/[2(1+μ)](泊松比μ=0.28)、c =r1/t1( r1为直圆铰链半径、t1为铰链最薄处厚度)、b1为直圆型铰链厚度。Kz1为z方向的等效刚度,l为加载力到铰链中心的距离。


(2)
式中,s =r2/t2( r2为直梁铰链半径、t2为铰链最薄处厚度)、L为直梁长度。同理,Kz2为z方向等效刚度。
根据CA6150机床实际尺寸,设计的柔性刀架结构参数见表1。
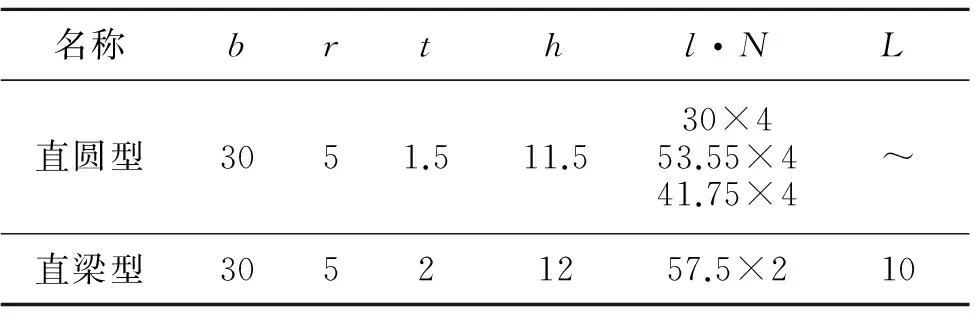
表1 柔性刀架结构参数(单位:mm)
表1中,h为铰链高度,l为作用力到铰链中心的距离,N为铰链单元数量。刀架材料选为45钢,可保证柔性刀架满足良好的抗疲劳性、韧性、塑性和耐磨性等性能。由式(1)和(2)可得直圆型和直梁型铰链z方向的等效刚度分别为1.90×107N/m和1.42×106N/m,柔性铰链总刚度为K=2.042×107N/m 。
将刀架的三维图导入到Workbench 14.5中,对刀架进行静力学分析,得到刀架在z、x、y三个方向上的变形(见图4~6)。由图可见,刀架在三个方向力的作用下,最大变形都发生在夹持刀具部位,同时,主切削力Fc以及进给力Ff对致动器的径向作用最小。图4中当z方向作用力为200 N时刀架变形量为10.022 μm,可得刀架在z方向上的等效刚度K=1.991×107N/m,与理论计算结果的偏差为2.4%。

图4 刀架z向变形Fig.4 The tool rest deformation of z direction

图5 刀架x向变形Fig.5 The tool rest deformation of x direction

图6 刀架y向变形Fig.6 The tool rest deformation of y direction
3 刀架动态特性分析
在车削加工中,为避免刀架产生共振,需要对设计的柔性刀架进行模态分析。在Workbench 14.5中,建立柔性刀架的模型,设定刀架材料为45钢,泊松比μ=0.28,对刀架进行划分网格以及无约束模态分析,得到柔性刀架的前六阶固有频率分别为:579.07 Hz、593.69 Hz、726.16 Hz、913.82 Hz、1 051.4 Hz、1 142.6 Hz。图7为前两阶振动模态。
由于固有频率是在无约束状态下求得的,因此,将刀架用橡皮筋悬挂于空中(见图8),以模拟无约束状态,对柔性刀架进行脉冲激励模态试验。在刀架的“夹持刀具部位”贴上加速度传感器3263M8;刀架保持在静止平衡状态,用脉冲锤(086B20)在图示方向敲击刀架,脉冲敲击锤频率范围为0~1 kHz,输出力范围为0~22 000 N,力传感器为480 B;用M+P数据分析软件对数据进行分析,得到如图9所示的柔性刀架振动频谱,由图可见,前六阶固有频率为:576 Hz、612 Hz、744 Hz、833 Hz、1 320 Hz、1 370 Hz,理论计算的固有频率基本相同。CA6150车削加工的最高转速为1 400 r/min,加工中产生的激振频率均小于450 Hz[9],由此可见,所设计的组合式柔性刀架避免了加工中刀架产生的共振,满足车削振动主动控制的要求。

图7 前两阶振动模态Fig.7 The first two order mode virbration

图8 柔性刀架脉冲激励实验Fig.8 The pulse excitation of flexible tool rest
4 结 语
综合考虑刀架受力以及执行器性能特点,本文利用柔性铰链的无间隙、无机械摩擦等优点,设计了用于CA6150机床车削振动主动控制的专用刀架,从结构上减小执行器受径向载荷的作用。论文对刀架静、动特性进行了理论分析,并与实验结果相比较。结果表明,本文设计的CA6150柔性专用刀架,具有较好的静、动特性,可以满足车削振动主动控制的要求。

图9 柔性刀架前六阶固有频率Fig.9 The first six natural frequencies of flexible tool rest
[1]林君焕,邹祥,李国平.基于压电陶瓷执行器的车削振动控制系统研究[J].计算机测量与控制,2011,19(6):1082-1085.
LIN Junhuan,ZOU Xiang,LI Guoping.Research on a tuming vibration control system based on piezoelectric ceramic actuator[J].Computer Measurement & Control,2011,19(6):1082-1085.
[2]张永亮,李郝林,刘军.外圆车削颤振的半主动模糊控制[J].振动与冲击,2012,31(1):102-105.
ZHANG Yongliang,LI Haolin,LIU Jun.Semi-active fuzzy control for cylindrical turning chatter[J].Journal of Vibration and Shock,2012,31(1):102-105.
[3]邹翔.压电陶瓷执行器在车削振动控制中的应用研究[D].宁波:宁波大学,2008.
ZOU Xiang.Study on piezoelectric actuator applied in turning vibration control[D].Ningbo:Ningbo University,2008.
[4]林海波,林君焕,杨国哲.卧式车床车削振动主动控制系统设计与实验研究[J].制造技术与机床,2011,6:93-96.
LIN Haibo,LIN Junhuan,YANG Guozhe.Design and experimental research on turning vibration active control system on horizontal lathe[J].Manufacturing Technology and Machine Tool,2011,6:93-96.
[5]江浩、龙新华,孟光.铣削主动减振平台设计及控制[J].上海交通大学学报,2008,42(5):725.
JIANG Hao,LONG Xinhua,MENG Guang.Design and control of active stage for vibration cancellation in milling[J].Journal of Shanghai Jiaotong University,2008,42(5):725.
[6]李晓舟,郭欣宾,谭云成,等.磁力跟刀架实验研究[J].组合机床与自动化加工技术,1994,11:31.
LI Xiaozhou,GUO Xinbin,TAN Yuncheng,et al.Experimental study of magnetism with the knife[J].Modular Machine Tool & Automatic Manufacturing Technique,1994,11:31.
[7]吴鹰飞,周兆英.柔性铰链的设计计算[J].工程力学,2002,19(6):136-140.
WU Yingfei,ZHOU Zhaoying.Design of flexure hinges[J].Engineering Mechanics,2002,19(6):136-140.
[8]任宁,耿铁,周峰,等.倒圆角直梁型柔性铰链刚度研究[J].机械强度,2012,34(3):366-370.
REN Ning,GENG Tie,ZHOU Feng,et al.Investigation of round straight beam type flexible hinge stiffness [J].Journal of Mechanical Strength,2012,34(3):366-370.
[9]池维佳,郝维斌.浅谈车削加工中产生的振动及控制方法[J].科学论坛,2011,35:86-87.
CHI Weijia,HAO Weibin.Talk shallowly on the vibration and control method in the turning process [J].Science Forum,2011,35:86-87.
(责任编辑王卫勋)
Design and analysis of flexible tool rest for CA6150
XU Bin,YANG Jing,GUO Mangmang
(School of Mechanical and Precision Instrument Engineering,Xi’an University of Technology,Xi’an 710048,China)
Given the tool rest subject to force in turning processing and the characteristics of control actuator,the design for tool rest plays a vital role in turning vibration active control.Using flexure hinge,a special flexible tool rest for CA6150 is designed to reduce the radial loading on the actuator,on the basis of which this paper analyzes the static and dynamic properties of this special tool rest,whereby showing that the structure can meet the design requirements,and then a pulse excitation experiment is conducted to verify that the holder has a better dynamic properties and can meet the requirements of turning active control for CA6150.
turning vibration; flexure hinge; special tool rest; static and dynamic properties
10.19322/j.cnki.issn.1006-4710.2016.01.021
2015-05-22
陕西省教育厅产业化基金资助项目(2013JC25);陕西省教育厅省级重点实验室科研计划基金资助项目(11JS0720)
徐彬,男,硕士生,研究方向为机电系统检测与控制。E-mail:xbuingoaix@163.com
杨静,女,副教授,博士,研究方向为机电系统检测与控制。E-mail:yjzhd@163.com
TH113.1
A
1006-4710(2016)01-0115-05
