电动摩托车驱动电机系统匹配方法研究
2016-09-05陈学永齐彤彤天津内燃机研究所天津300072
刘 力 陈学永 齐彤彤(天津内燃机研究所 天津 300072)
电动摩托车驱动电机系统匹配方法研究
刘力陈学永齐彤彤
(天津内燃机研究所天津300072)
针对电动摩托车驱动电机系统设计要求,结合电动摩托车行驶阻力计算方法,电动摩托车的最高车速、加速性能、爬坡能力和续行里程4个重要指标的计算方法,设计开发了以电动摩托车整车性能指标作为设计输入,以直流无刷电机设计指标作为设计输出的一套计算方法。研究了电动摩托车行驶阻力对于直流无刷驱动系统设计匹配的影响。
直流无刷电机电动摩托车行驶阻力驱动系统匹配方法
引言
电动摩托车产品是最近几年来的新型产品,其家族中主要包括电动二轮车和电动三轮车,它们是在燃油摩托车和电动自行车相结合的基础上发展起来的,且发展的速度非常快。从技术平台而言,我国的电动摩托车主要是结合了燃油摩托车的外观和车架,以及电动自行车动力平台的大功率化,虽然已经形成了较大的产业化规模,但是其整车与驱动系统的匹配性而言,仍然处于初级阶段。
之所以造成这样一个局面,主要原因是驱动系统供应体系与整车组装厂之间的衔接不够紧密。驱动系统供应商不掌握与整车的匹配技术,整车组装厂的技术能力较低,无法提出一套完备的驱动系统性能指标需求方案,且几乎完全依托于驱动系统供应商。随着电动摩托车产品销量的快速增长,整车组装厂和驱动系统供应商更加关注于产品产能和销量的快速增加,没有过多的精力投入到驱动系统与整车的性能匹配。
本文提出一种根据整车行驶阻力方程为依据,以整车动力性能和经济性能为设计输出,对电动摩托车所用的直流无刷驱动电机提出设计要求的计算方法。
1 电动摩托车行驶阻力计算方法
电动摩托车的动力性主要体现在电动摩托车驱动系统输出与电动摩托车行驶阻力之间的匹配。本节主要讲述电动摩托车的行驶阻力特性[1-5]。
电动摩托车行驶时,会受到与行驶方向相反的各种力的作用,这些力统称为行驶阻力。这些阻力主要包括路面与轮胎作用产生的滚动阻力Ff,空气与车身、人体摩擦产生的空气阻力Fw,在坡道上直线行驶时克服其重力沿坡向后的坡道阻力Fi,在加速行驶过程中所要克服的加速阻力Fj。因此,电动摩托车的行驶阻力之和为:

1.1滚动阻力
电动摩托车的车轮分为主动轮和从动轮,因此,滚动阻力可分解为主动轮滚动阻力和从动轮滚动阻力。我们在进行整车驱动系统设计及匹配时,考虑的是整车的阻力特性,因此将滚动阻力分解到主动轮和从动轮,从整车角度考虑即可。根据理论推导及文献介绍,电动摩托车整车滚动阻力计算公式为:

式中:G为电动摩托车整车(含驾驶员)的总重量,单位为N;f为电动摩托车滚动阻力系数,该系数通常在道路上或转鼓试验台上测得。
滚动阻力系数与路面、轮胎胎压有很大关系,针对于不同的路面,滚动阻力系数取值范围是0.010~ 0.030。对于轮胎胎压而言,针对不同的试验,在相关标准中有明确规定,在此不再阐述。
当车速大于50km/h时,需要对滚动阻力系数进行修正,修正公式为。式中:f0为整车选取的滚动阻力系数;v为车速,单位为km/h。

1.2空气阻力
行驶时,电动摩托车在空气中运动,受到迎面空气的作用,称为空气阻力。空气阻力计算公式为。式中:CD为空气阻力系数,对于电动摩托车而言,由于其外观设计更多的考虑了美观性,对于外观件的流畅性考虑相对较少,该类车型的空气阻力系数偏大,取值0.7左右;A为迎风面积,即电动摩托车(含驾驶员)行驶方向的正投影面积,单位为m2。对于电动摩托车,驾驶员身高1.75m,该参数取值0.65左右; ρ为空气密度,一般取值1.29kg/m3;vr为相对车速,单位为m/s。

1.3坡道阻力
当电动摩托车在具有纵向坡度的路面上上坡行驶时,其受到重力沿坡道的分力作用,称为坡道阻力。

式中:a为坡道角。
1.4加速阻力
电动摩托车加速行驶过程中,除了克服上述的各种阻力外,还需要克服其质量加速运动时的惯性阻力,此惯性阻力称之为加速阻力,它包括平移质量加速阻力和旋转质量加速阻力。
1.4.1平移质量加速阻力
加速时,电动摩托车总质量(含驾驶员)与加速度乘积即为平移质量加速阻力Fj1。

1.4.2旋转质量加速阻力
电动摩托车的旋转质量加速阻力,包括动力电机转子、变速器(带有变档机构的齿轮)、二次传动(链条、链轮等)、前后轮等部件在加速时形成的惯性阻力矩,并把它换算成为作用于摩托车车轮上的等效加速阻力Fj2。
1)电机转子部分
电机转子部分加速时形成的惯性阻力矩为:

式中:I1为电机转子的转动惯量,单位为kg·m2;
为电机转子的角加速度,单位为1/s2。
换算到车轮的等效惯性力矩和等效加速阻力分别为:

式中:ηT为整个传动系统的传动效率。
2)变速器、传动装置部分

式中:I2为该部件的转动惯量,单位为kg·m2;为该部件的角加速度,单位为1/s2。,换算到车轮的等效惯性力矩和等效加速阻力分别为:

式中:ηT1为除初级传动比以外的传动效率,如粗略计算,可用ηT代替。
3)车轮部分的加速阻力

式中:∑I3为前、后轮的传动惯量,单位为kg·m2。
车轮部分的加速阻力为:

通过以上分析,电动摩托车旋转加速阻力为:

1.4.3电动摩托车加速阻力
综上所述,电动摩托车加速行驶时的总的加速阻力为:

称为旋转质量换算系数,则有

对于不同类型的电动摩托车,加速阻力的计算不尽相同。在我国,电动摩托车均采用轮毂直驱电机形式。该类型电机无传动结构,因此传动部分的旋转质量阻力可不考虑,F'''j2=0;
电机采用外转子结构,电机外转子与驱动轮一部分的附加质量,另,只考虑即可。
通过对该类型车型的分析、测试及计算,δ一般取值1.046。
1.5电动摩托车的总行驶阻力
电动摩托车在不同的路面上不同的行驶状态,其总的行驶阻力各不相同。
坡道加速行驶

2 电动摩托车动力性能及经济性能计算方法
电动摩托车的性能指标主要分为动力性能和经济性能。动力性能又分为最高车速、最大爬坡能力和加速性能。经济性能指的是续驶里程。本节主要就上述4个指标的计算方法进行阐述。
2.1最高车速
如果采用数值计算的方法,最高车速即为整车行驶阻力曲线与整车驱动力曲线的交叉点。
驱动力计算公式为:

式中:Ft为驱动系统驱动力,单位为N;Me为驱动系统驱动转矩,单位为N·m;r为驱动轮工作半径,单位为m。
电机转速与电动摩托车行驶速度之间的关系式为:

式中:ua为电动摩托车行驶速度,单位为km/h;ne为电机转速,单位为r/min。
根据电动摩托车国家标准GB/T 24156-2009《电动摩托车及电动轻便摩托车动力性能试验方法》规定,在水平道路上,测试最高稳定车速,因此该测试条件下,坡道阻力为0,加速阻力为0,仅考虑滚动阻力和空气阻力两个因素。即有如下公式:

根据驱动力计算公式可计算出不同扭矩下的驱动力数值,根据行驶阻力公式计算出电动摩托车在行驶过程中的行驶阻力数值,再根据转速与车速的关系计算出不同驱动力不同行驶阻力对应的车速数值,在坐标系下描绘出驱动力-行驶阻力平衡图,如图1所示。
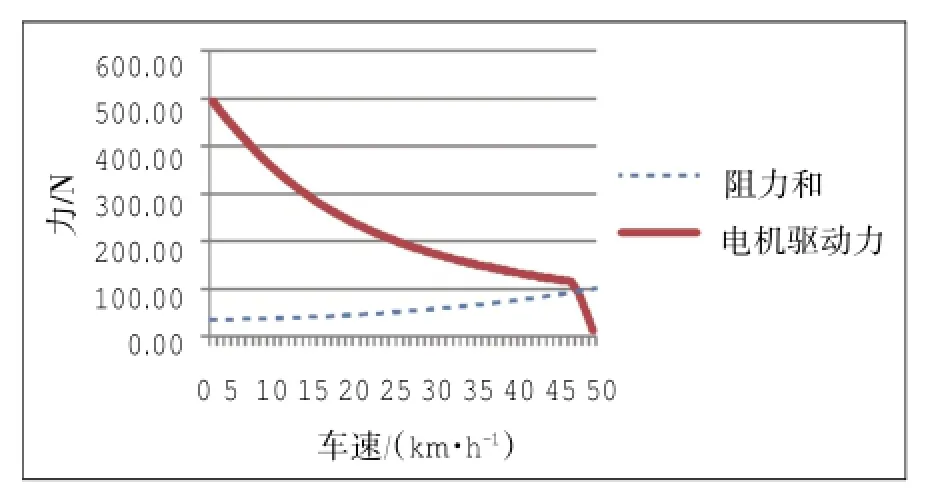
图1 驱动力行驶阻力平衡图
2.2最大爬坡度
根据电动摩托车国家标准GB/T 24156-2009《电动摩托车及电动轻便摩托车动力性能试验方法》规定,电动摩托车的最大爬坡度为电动摩托车在小于5km/h车速下,所能达到的最大爬坡度。
具体计算方法为,首先计算出驱动系统在5km/h车速下的驱动力,然后根据爬坡阻力Fi的计算公式计算出此时的坡道角度。因为在5km/h车速下的行驶阻力和空气阻力可以忽略不计,因此可直接按照坡道阻力计算即可。驱动力与爬坡力平衡图如图2所示。
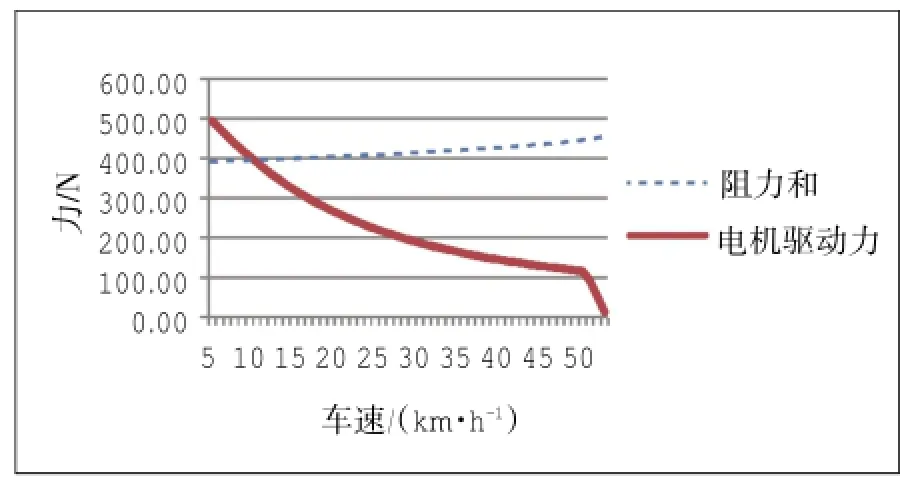
图2 驱动力爬坡力平衡图
2.3加速性能
我国的电动摩托车最高时速一般都在50km/h~ 60km/h,因此其加速性能考核指标,一般为考核电动摩托车在0~100m距离内,油门全开模式下的加速时间。
电动摩托车加速时,不仅平移质量产生惯性力,旋转质量也要产生惯性力矩,为了便于计算,常用旋转质量换算系数δ将旋转质量转换为平动质量,根据上一节的分析,我们按照δ=1.046计算。
电动摩托车的加速能力可用它在水平良好路面上行驶时能产生的加速度来评价,其加速度计算公式如下。

由于加速度的数值不易直接测量,实际中常用加速时间来表明电动摩托车的加速能力。
起步加速为以最低速起步,进行急加速,计算原地起步加速时,所经历的时间。
通过计算期间对应的距离,即可估算出起步加速时间。期间行驶距离为:

车速由v1加速到v2所需时间为:

由此可计算出加速通过100m测试距离需要的时间。
2.4经济性能
经济性能即为电动摩托车的续驶里程,按照国家标准GB/T 24157-2009《电动摩托车及电动轻便摩托车能量消耗率和续驶里程试验方法》规定,可按照电动摩托车最高车速70%等速测量进行评估。
在续驶里程测量时,电动摩托车处于水平路面,匀速行驶,此时整车受到滚动阻力和空气阻力影响,驱动系统的驱动力可以按照这两个因素进行计算,即

通过驱动力和车速ua可以计算出驱动系统的输出机械功率。

驱动系统的输入端连接动力电池,输出端为直接驱动轮。电池输出功率为Pb,驱动系统输出功率与电池输出功率的比值为驱动系统效率η。

在续驶里程测试时,测试车速为ua,此时需要的驱动功率为Pe,对应的动力电池输出功率为Pb。假定此时蓄电池容量为Q,则蓄电池在输出功率Pb情况下的放电时间为:

也就是说,该车用动力蓄电池在车速为ua的情况下,可以连续运行时间t。因此,续驶里程计算公式为:

3 电动摩托车驱动系统匹配方法
电动摩托车在设计时,应该首先确定动力性能和经济性能指标,并以此指标作为设计输入,进行整车驱动系统设计。下面,我们以一款踏板式轮毂电机驱动电动摩托车直流无刷驱动系统设计匹配实例,对设计匹配方法进行阐述。
首先,我们提供整车基本参数及性能指标要求如表1所示。

表1 电动摩托车基本参数
根据整车性能计算电机特性曲线的方法
3.1整车行驶阻力方程
根据该类车型的经验数据,我们假定该车滚动阻力系数为0.021,空气阻力系数为0.7,迎风面积为0.66m2。
根据公式计算,得出整车行驶阻力曲线如图3所示。

图3 行驶阻力曲线
3.2最高负载转速计算
根据整车最高车速51km/h计算,此时整车驱动轮的输出转矩为19N·m,此时驱动轮转速为659.9r/min。
3.3爬坡计算
根据最大爬坡度的要求及车速在5km/h时爬坡角度为12°,此时车速很低,可以忽略空气阻力的影响。
此时的滚动阻力为:

此时的坡道阻力为
Fi=G×sin a=(100+75)×9.8×sin12°=356.6N
合成阻力为
F=35.2+356.6=391.8N
阻力矩为
M=F×R=391.8×0.41÷2=80.3N·m
车速5km/h对应车轮转速为64.7r/min,此时要求的电机输出转矩应不小于80.3N·m。
3.4续驶里程计算
按照国家标准GB/T 24157-2009《电动摩托车及电动轻便摩托车能量消耗率和续驶里程试验方法》规定,续驶里程可以按照最高车速70%计算,该设计的最高车速为51km/h,其测试车速为35.7km/h。根据道路阻力方程,可以计算出35.7km/h时的道路阻力为63.88N·m,此时需要的驱动功率为:
Pe=Ft×ua=63.88×35.7÷3.6=633.5W
该车的电池容量为60V20Ah,即为1 200Wh,续驶里程要求55km,则行驶时间为55/35.7=1.54h,折算到电池的放电功率为1200/1.54=779W。
由此可见,电池的放电功率为779W,电机的输出功率为633.5W,因此可以计算出此时电机系统的工作效率如下。

因此,在电机设计时,需要考虑电机在这个工作点的效率不小于81.3%
3.5计算电机特性曲线
该电动摩托车电机为直流无刷轮毂电机,在其工作曲线中,没有恒转矩和恒功率段,因此,我们需要首先推导出其工作特性曲线方程。
在控制器电流小于等于限制值时,电机特性曲线为标准直流电机特性,公式如下。
n=n0-K·M(33)
式中:n0为电机空载转速,K为特性曲线斜率。
当控制器达到限流值后,随着电机负载的增加,控制器PWM将调试母线的端电压,使其降低,以确保控制器母线电流不超过限电流值。此时,电机的特
(性曲线将发生变化,公式如下。

式中,M1为电机最大功率处的转矩。
假定该电机的最大功率处效率为89%,则最大功率为60×30×0.89=1 602W。
根据最高车速和最大爬坡能力两个工作状态以及最大功率1 602W这3个工作特征点,可以计算出电机关键工作点。
n0=690r/min
K=1.58
M1=23.5N·m
从而推导出,电机转矩-转速特性如图4所示。

图4 电机转速-转矩曲线
4 结论
以电动摩托车道路行驶阻力方程为主要设计参考,以整车性能参数为设计输入,对期望电机输出特性关键点进行计算,然后根据电机输出曲线特点,对输出曲线进行预估,根据预估的电机输出曲线对电机进行设计,这种正向的设计流程,有足够的理论作为支撑,可作为直流无刷电机与电动摩托车动力性能匹配的方法使用。
1艾兆虎.摩托车理论[M].北京:人民邮电出版社,1997
2王志福,张承宁.电动汽车电驱动理论与设计[M].北京:机械工业出版社,2012
3朱军.新能源汽车动力系统控制原理及应用[M].上海:上海科学技术出版社,2013
4刁海,崔国起,陈光辉,等,摩托车空气阻力系数的测试[J].小型内燃机与摩托车,2005,34(2):8-10
5徐中明,晋杰,张志飞,等,摩托车滑行试验数据处理[J].重庆大学学报(自然科学版),2007,30(9):14-16
A M atching M ethod Research on Driving M otor System on Electric Motorcycles
Liu Li1,Chen Xueyong1,Qi Tongtong1
Tianjin InternalCombustion Engine Research Institute(Tianjin,300072,China)
Aiming at the performance requirements of driving system for electric motorcycle,combining the calculation method of driving resistance,as well as of the max speed,accelerating ability,climbing ability and driving range,a calculationmethod ofdesign targetof BLDC(brushlessdirectcurrent)motor is developed,whose input is the performance of electric motorcycle.The influence of driving resistance on BLDC driving system matching is studied.
BLDCmotor,Electric vehicle,Driving resistance,Driving system,Matchingmethod
U483
A
2095-8234(2016)02-0063-06
2015-08-14)
刘力(1959-),男,高级工程师,主要研究方向为车用驱动电机系统。
