清污机器人智能避障控制设计探讨
2016-09-05撰文石宇轩
撰文/石宇轩
■256603 山东省滨州市北镇中学 山东 滨州
清污机器人智能避障控制设计探讨
撰文/石宇轩
■256603 山东省滨州市北镇中学 山东 滨州
智能清污机器人可代替人力自动进行复杂水域环境清污作业,为避免机器人在水下运行出现问题,必须要加强机器人智能避障控制设计。本文通过有效控制设计,实现了机器人对障碍的智能避让。关键词:水下清污;清污机器人;智能避障控制
随着现代信息和科学技术的飞跃发展,机器人在社会经济、生活各领域的应用越来越广泛。以前的水下清污机器人,由于智能化水平不高,大多都需要人力进行拖动行走,或者由人工在岸上根据机器人运动情况进行实时操控。本文所研究的清污机器人,是一种能在水下自动行走并进行清洁工作的机器人,可以有效代替人力在复杂水域进行水下清污作业。这种清污机器人具有智能化水平高、控制灵活、工作效率高、成本低等优点,可充分满足新时期水域清污和水域环境养护工作的需求。清污机器人在水下作业过程中,可能会遇到立柱、墙壁、树干等障碍物,如何提高清洁机器人智能避障控制设计水平,保证机器人在水下行走中不会出现碰撞、堵死或卡死等情况,是当前清洁机器人研究的重点和难点。本文主要针对水下清污机器人智能避障控制设计问题进行探讨。
水下清污机器人智能避障控制设计
a障碍检测
运动物体的障碍检测主要分为接触检测和非接触检测两种,前者可细分为微动开关检测、压力传感器检测和加速度检测等几种;后者可细分为红外检测、循迹检测、超声波检测和接近开关检测等几种。接触式检测的原理是机器人在接触到障碍物后,通过与障碍物产生互相作用力,并将这种作用力转换为电信号,从而完成障碍检测。接触式检测一般都直接安装在机器人主体并浸泡于水中,检测精度良好,只要遇到障碍物,机器人就会紧急制动,其缺点是会因较大的惯性而导致机器人与障碍物发生碰撞,影响机器人结构、性能稳定,降低机器人的使用寿命。非接触式的检测方法是通过传感器来检测障碍物,机器人不需要与障碍物进行直接接触,其缺点是不太适宜安装在水下。如果安装在水下,不仅检测精度会下降,而且投入成本也将较大。故可将其安装于水面之上,使其保持与机器人同步运行。在非接触式检测方法中,超声波检测效果最好,不需要考虑光照影响,也不需要在水下布设循迹识别物,更不需要非常接近障碍物等,就能比较准确地测量出障碍物与机器人的距离,同时,根据需要控制指令自动设定避障方案。
b控制电路
在利用超声波进行障碍检测的过程中,采用HC-SR04超声检测模块。主控电路为51系列单片机,通过MAX232芯片进行信号调制,然后将信号输送到超声波发生头,形成超声信号,利用PNP三极管控制超声信号的电源通断,同时,利用74系列的芯片对接收信号进行调制处理,之后,将其输送给单片机读取和运算,最后,计算结果将反馈到J1端口,从而实现与外部设备通讯。模块示意图见图1所示。模块控制通过IO触发方式实现,利用单片机的IO口将TRIG引脚拉低,在此基础上,单片机给出一个10sµ 以上的脉冲信号,模块便发送8个40kHz的超声方波信号,并自动检测是否有信号返回。如果检测到有信号返回,系统就通过IO输出一高电平,高电平持续的时间为超声波发射到返回所用的时间。测试距离可表示如下:
其中,s表示测试距离,m、v表示声音的速度,m/s表示高电平时间。

图1 超声检测模块
在实际应用过程中,可以根据测量到的障碍距离和机器人的运行速度,来控制机器人减速、拐弯避让或停止运行的时间。
c应用程序设计
控制程序依据超声波模块触发和信号读取要求,通过单片机与其实现通讯,同时,对机器人与障碍物的距离进行测量,控制机器人的下一步运动状态。具体流程见图2所示。首先,对端口和功能寄存器进行定义,向超声波模块发送20sµ 的触发信号,并等待检测反馈信号。设置定时器参数,以单片机的定时器中断来作为计时基准,从而实现测量信号反馈时间的计时统计。完成计时之后,将测试数据代入公式(1),就可以计算障碍距离,控制机器人避障运动。
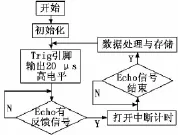
图2 控制程序流程
结语
清污机器人的障碍检测和智能避让,能有效提高机器人的工作效率和使用寿命,在运动速度适宜的情况下,利用水面随动超声波检测,可以较好地实现水下清污机器人智能避障控制。
参考:
[1]王晓芳.智能机器人的现状、应用及其发展趋势[J].科技视界,2015,33:98-99.
[2]梁辰滔,闫娟,张浩,陈荣华,何涛.环保型复合式避障清洁机器人的设计[J].机械工程师,2015,10:193-194.