某民机机翼站位分载算法
2016-09-03田忠良
田忠良 吴 强
某民机机翼站位分载算法
田忠良 吴 强
节点载荷是飞机内力计算的重要输入,按照站位计算节点载荷是机翼载荷分配的主要形式之一。针对传统分载算法可能导致分载站位错误等问题,本文提出了基于站位所在平面的判断方式和分载算法。研究表明,该算法得到的节点载荷能更好地反映原始载荷的特征。
有限元内力计算结果是检验飞机设计是否安全的重要参考因素,而准确合理的节点载荷是保证内力计算结果可信的必要条件之一。飞机设计初始阶段,各工况气动载荷往往按照站位给出,仅给出机翼载荷的展向分布而忽略其弦向分布。而强度校核使用的有限元模型网格相比原始载荷网格也并不一致,所以原始载荷需要相应地等效到有限元网格上。根据原始载荷格式以及有限元计算需求的不同,载荷分载的方式有所不同,常用的有考虑载荷弦向分布的分布力载荷分载和忽略弦向分布的站位载荷分载。分布力载荷分载是将每个原始载荷等效到有限元网格最近单元的节点上,而站位分载是将每个原始载荷等效到有限元网格最近两个站位的所有节点上。
由于机翼有限元网格各站位所在平面不平行且包含节点数不确定,故机翼的站位分载相对于分布力载荷分载以及其他部段的站位分载更为复杂。其主要难点在于使用一套通用有效的算法判断每个原始载荷对应的站位,即载荷点处在哪两个站位之间。传统算法是根据原始载荷点到各站位上所有节点对应形心位置的距离远近判断对应站位,而这种算法对机翼站位交叉附近区域和远离翼肋形心位置的载荷会出现误判。
为了得到正确且合理的站位分载方式,本文从每个站位所在平面的法线出发,得到了一套能够准确判断载荷点对应站位的方法,结合相应的分载原理,最终实现了从原始载荷到有限元载荷的自动化站位分载。
站位分载流程
站位分载的目的是把原始载荷等效到有限元网格站位节点上,对于每个载荷点,这一过程可细化为判断出该点在哪两个相邻站位之间,而后将该点载荷等效到这两个站位的所有节点上。
根据上述目的和过程,机翼的站位分载流程如下:
根据节点特征提取站位
根据每个原始载荷点的位置信息判断其对应的两个站位
将每个原始载荷分配到各自对应站位的所有节点上
输出等效有限元载荷卡
该流程输入信息包括原始载荷信息和有限元站位节点位置信息,输出信息为对应于站位节点的载荷卡。
根据有限元站位节点信息提取站位时,可以通过节点编号等特征判断每个节点所属站位,最终得到所有站位的信息,站位信息包括每个站位的编号和顺序、所包含的节点号以及所在平面的法线方向等。图1为某民机机翼站位简化后的示意图,实际站位较之更为密集和复杂。
图1中框表示每个站位所在平面,框内的点为站位节点,用字母和数字代替站位的编号。站位提取时需剔除站位所有节点共线的情况,因为共线节点上的力无法提供其连线方向的力矩,从而导致该站位分载失败。站位提取完成后,根据机翼的对称性将站位分成三个部分:对称面站位(N0)、左侧站位(NLi)和右侧站位(NRi),以方便原始载荷点对应站位的判断。

图1 站位示意图
原始载荷点对应站位判断
传统距离判断站位的算法不适用于一些特殊区域的载荷,如图1中NR2和NR3交叉处右上的一定区域内,传统算法会将原始载荷点对应站位判断为NR2和NR3,而这些载荷点实际对应站位应为NR3和NR4。本文通过各站位所在平面的法线来判断原始载荷对应站位,有效地避免了类似的错误,其判断过程如下:
计算各站位面有限元节点对应形心CRi和CLi
计算站位NRi和NLi所在平面法线向量nRi和nLi,且法线指向均背离N0
根据原始载荷点位置坐标P来判断其相对N0位置
若P在N0平面内,则该载荷对应的两个站位都给定位N0;若P在N0右侧,则从左到右搜索NRi,直至P 到CRi的向量与nRi点乘大于零(即夹角小于90°),则对应站位为NRi-1和NRi;若P在N0左侧,则从右到左搜索NLi,直至P到CLi的向量与nLi点乘大于零,则对应站位为NLi-1和NLi。
该算法判断载荷点对应站位时能够避免传统算法所遇到的问题和错误,且对于载荷点位置距离有限元网格站位节点较远等复杂情况同样适用。在该算法的编写过程中,仍需对一些特殊情况做出相应的判断,如原始载荷在所有分载站位的同一侧,即上述算法(4)无法搜索到所需结果时,可将对应站位设定为距离其最近的两个边界站位。
原始载荷等效到站位节点
根据原始载荷点对应站位的判断以及各站位所包含的节点信息,可以得到原始载荷对应的等效节点。而由于各站位所包含节点数的不确定性,在原始载荷等效到对应站位节点时,所需求解的方程个数也是不确定的。

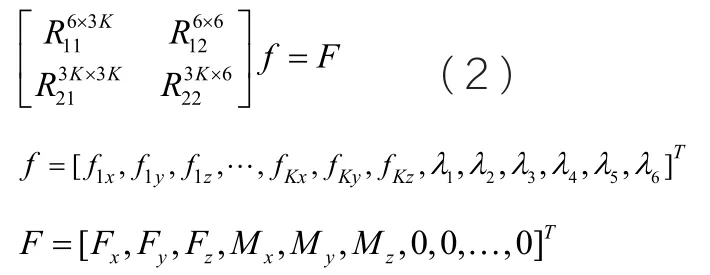
其中R21为3K×3K的对角矩阵,对角线上每个值都为2,R21为零矩阵。R11和R22的构成如下:

求解方程(2)即可得到每个原始载荷等效到对应站位节点上的力,最终可求得有限元站位节点的载荷卡。由方程(2)可知,对每个原始载荷都需求解3K+6个方程,但方程具有一定的规律性,在编写程序时可以加以利用。
算法比较
在飞机载荷处理过程中,每种分载方式都需要使用与之对应的检验方法进行验证,以保证分载结果的可靠性。对于机翼站位分载结果,常用的检验方法是在刚轴坐标系下,计算每个刚轴点所在位置往该侧翼尖方向所有载荷对该刚轴点的累积载荷,分载结果相比于原始载荷的偏差越小说明结果越可靠。其中,刚轴坐标系是一套与机翼站位方向一致的坐标系,每个刚轴点对应一个站位。不难看出,这套检验方法中只有未参与分载的站位在计算累积载荷时分载结果和原始载荷完全一致,其余情况下越远离翼根的累积载荷偏差越大。
另外,在飞机强度校核时,不同部段关注的载荷方向不同。对于机翼上的载荷,翼盒的剪力和弯矩为主要关注对象,分别记为F1和M1。因此,在机翼分载结果的检验过程中,主要考核各站位累积载荷中的F1和M1,计算其相比于原始载荷的误差。
分别使用传统机翼站位分载算法和本文算法对某种机翼工况的原始载荷进行站位分载,对比两者分载结果相比于原始载荷的误差,如表1所示。表1选取了离翼根较近的5个站位的刚轴点作为载荷累积点,计算了不同分载结果相比于原始载荷在垂直于翼面方向累积力(翼盒剪力)以及绕机身方向累积力矩(翼盒弯矩)的误差。
由表1可知,对于垂直翼面方向的累积力,传统分载和本文的分载结果与原始载荷误差基本一致,都控制在较小的误差范围内;而对于绕机身方向的累积力矩,本文算法结果基本和原始载荷一致,而传统算法误差较大。因此,本文提出的机翼分载算法更可靠,能更好地反映出原始载荷的特征。

表1 不同分载结果误差对比
结语
本文提出了一个基于站位所在平面的机翼站位分载算法,修正了传统站位分载可能出现的一些问题,使得机翼站位分载更加合理,提高了有限元模型内力计算的可信度,对飞机机翼有限元强度校核具有一定的意义。

田忠良 吴 强
上海飞机设计研究院
田忠良,男,硕士研究生,上海飞机设计研究院,强度设计研究部。
10.3969/j.issn.1001-8972.2016.10.015
