四旋翼自主飞行算法
2016-09-03李润仪李华根魏海松
李润仪 李华根 魏海松
四旋翼自主飞行算法
李润仪 李华根 魏海松
本文针对四旋翼飞控程序的制作进行一定研究。通过STM32芯片以及MPU6050等器件搭建一个简易的四旋翼模型。通过四元数算法得到姿态。再通过串级PID来控制飞机。同时通过超声波与加速度计数据融合后实现定高。设计完成的四旋翼能够进行比较好的姿态自稳,以及定高。为下一步定点循迹打下基础。
小型四旋翼的研究现状及用途
对于四旋翼的研究可以追溯到20世纪初。当时所制造的四旋翼体积都相当庞大。受制于当时的工业水平,所制造出来的四旋翼效能低下,平衡性差。如1907年法国Breguet兄弟在Charles Richet教授的指导下所制造出来的高达3.7m,重达约500kg的Gyroplane No.10。虽然性能较差,但是作为四旋翼的起步雏形,意义十分重要。
21世纪开始随着电子集成技术以及各类自动控制理论的发展,小型四旋翼的制作成为可能,如瑞士洛桑联邦学院在2003年所研发的OS4小型四旋翼,就是使用了PID算法0,最优控制理论实现了自主飞行。
PID控制器在四旋翼上的应用
四旋翼使用常规的PID控制器,通过选择合适的参数即可达到较好的自稳状态。目前,民用级的四旋翼多使用PID控制,或串级PID控制来实现自平衡。
飞控软件设计
当前市场上有众多成熟的成品四旋翼以及成品飞控,也有许多较为成熟的开源飞控软件。实验所使用四旋翼飞控程序使用Keil μVision5编写。使用ANO-TC上位机进行调试。
实验四旋翼角度自稳控制使用的是串级PID,外环控制角度使用PID控制器,提高控制精度,内环控制角速度使用PD控制器产生阻尼效果,防止调节过快导致震荡,优化飞行效果。两级PID均采用位置式PID。
依据调参顺序:
外环角速度PID:

其中Epitch(t)为当前四旋翼实际角度与目标角度的差值,即:

PID参数为:

同理横滚角的PID:

参数同俯仰角

偏航角的PD

参数相比于前面的角度有所变化
内环角速度PD:

G(t)为当前测得的角速度,即:

图1 Gyroplane No.1
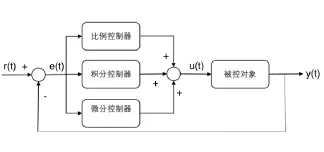
图2 PID控制器

图3 实验四旋翼模型

外环中选择参数:

横滚以及偏航类似与此,不再一一列举。
计算完成之后将PID的总输出输出到电机PWM参数中,通过改变PWM的占空比来调整电机的转速。
定高算法设计
定高算法参考了开源飞控crazepony、ANO-TC的开源飞控程序,通过融合MPU6050的加速度计的来进行定高。
高度控制也使用了串级PID。但是由于高度受到飞行器质量,所处环境的影响较大。因此相较于角度环,PID参数更难整定。另外超声波数据与加速度计融合后用于PID控制也是定高控制的难点之一。
实验所使用的ks103自带温度补偿,因此可以较为准确的获得距离,但是它的波束角较大(约35°),且温度补偿后,数据处理时间较长(间隔约91ms)。因此需要加速度计的参与来实现较高的控制频率,达到较好的控制效果。
定高的内环将超声波的数据直接用于控制,其公式为:

外环为Z轴上的速度环:

得到PID输出后,与原有油门杆量加权求和后加到电机PWM占空比上。达到定高目的。
实验效果
实验四旋翼在角度自稳上有比较好的表现,在人为干扰的情况下也能较快的回到目标姿态。但是控制精度一般,因此会导致四旋翼相对位置在短时间变化非常大,难以控制。而高度环上控制效果较好,在无干扰时能在上下5cm内震荡,但是当四轴飞行器在受到干扰时,回到目标位置就比较缓慢。
神经网络算法
人工神经网络兴起于20世纪初,但是随后随着对神经网络的进一步研究。人们开始认识到人工伸进网络的局限性。但是随着近些年电子技术的发展,人工神经网络再次兴起,出现了Hopfield网络,Boltzmann机等。
现今人工神经网络已经成为涉及认知,数理,信息,计算机科学等多多学科交叉、综合的前沿学科。在智能控制,信号处理,机器视觉等方面也有许多的应用。
神经网络智能PID控制器
神经网络通过模拟人脑的工作来实现自我调整,具有可逼近任何复杂非线性系统,鲁棒性、容错性强。因此,近年来在控制领域得到了极为广泛的应用。神经网络在解决高度复杂,高度非线性,高度不确定性系统方面有巨大的潜能在这种控制方式中。神经网络会先按照一定的算法进行学习,一般分为有指导和无指导学习。然后接入控制系统,并更具当前的各项输入给出一组最佳的PID控制器参数。同时还要继续学习,不断调整各个神经元之间的连接权系数以得到最好的控制效果。由于权系数是由学习阶段所有的信息更具特定算法计算后得到的统计信息。因此,加入了神经网络的智能PID算法有着更高的容错性,更好的适应性,更高的控制效率。
结语
本文设计完成了一套能够角度自稳,实现定高的四旋翼模型。使用STM32芯片,以及MPU6050等传感器。通过四元数,PID控制等算法完成了能够进行遥控飞行,定高的要求的飞行器。但是在定高,定位效果上比较一般。下一步将整合摄像头等传感器,以及使用神经网络算法来优化飞行效果。并且实现自主悬停以及低空循迹等功能。

李润仪 李华根 魏海松
中国民航大学
基金来源:天津市级大学生创新创业项目
项目编号:201510059087
10.3969/j.issn.1001-8972.2016.10.009
