基于双幂次趋近律的感应电机控制设计与仿真研究
2016-09-02路永坤
路永坤
(天津科技大学电子信息与自动化学院,天津300222)
基于双幂次趋近律的感应电机控制设计与仿真研究
路永坤
(天津科技大学电子信息与自动化学院,天津300222)
为了提高感应电机矢量控制转速环中转速控制的跟踪性能和抗干扰性能,提出一种用于转速控制的基于双幂次趋近律的滑模控制器设计方法。采用比例积分滑模面减小转速稳态静差。通过双幂次趋近律实现快速跟随转速指令。用双曲正切函数来减小抖振现象。同基于传统比例速度控制器的对比仿真表明,所提出控制器使转速控制不仅获得了较快的跟踪性能和较好的抗干扰性能,而且没有明显抖振现象。
感应电机矢量控制;转速控制;滑模控制;双幂次趋近律
1 引言
感应电机是一种应用广泛的交流电机。矢量控制是一种高性能交流电机控制方法。在很多采用感应电机的工业运动控制应用场合,存在机械参数变化和未知负载转矩,会影响感应电机矢量控制中转速控制的实施[1]。很多滑模控制方法被用于感应电机矢量控制系统中的转速控制中[1,2]。为了削弱或消除抖振,我国著名学者高为炳提出“趋近律”概念[3],其中包括指数趋近律和幂次趋近律等。双幂次趋近律是一种改进的幂次趋近律,提高了系统状态趋近滑模面的速度[4]。双幂次趋近律已被应用到直流力矩电机[5]和永磁同步电机[6]的控制中。据查,目前没有针对感应电机矢量控制系统进行基于双幂次趋近律的滑模控制的设计。
为了能提高感应电机矢量控制中转速控制的跟踪性能和抗干扰性能,减小抖振,在目前双幂次趋近律的基础上,进一步引进双曲正切函数,设计了一种感应电动机的基于比例积分滑模面的滑模控制。通过数值仿真验证了所提出感应电机转速控制器的有效性。
2 两相系中三相感应电机的模型和问题描述
按转子磁链定向的两相系中三相感应电机的数学模型[7]如下:
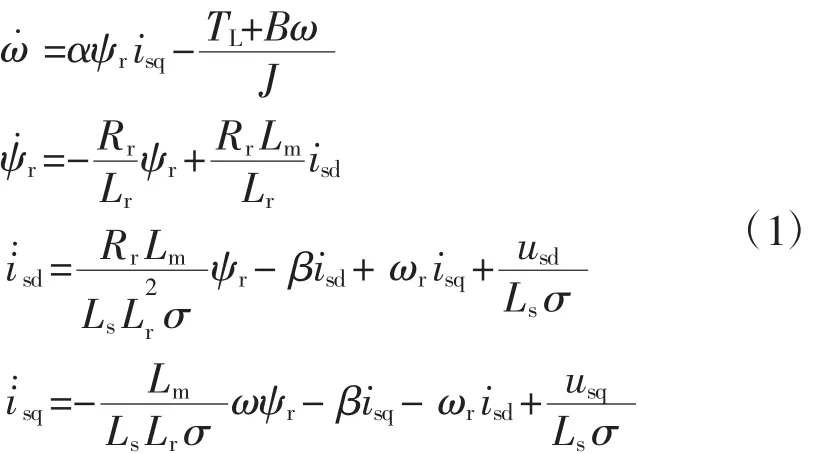

电磁转矩定义如下:

感应电机机械特性方程重写如下:

设计目标是针对式(3)所表示的不确定系统,设计一个控制器,该控制器能跟踪转子速度指令信号。
3 转速滑模控制器设计
式(3)等效如下:

式中:b=αψr,f=-(Bω+TL)/J,控制输入u=isq,f和b均未知。
为了减小突加负载和电机机械参数变化时转速稳态静差,定义比例积分滑模面如下:

式中:e=ω-vr,vr是速度指令信号,ki和δ是比例积分滑模面参数。
选取控制律如下:


式中:v1>1,0<v2<1,k1>0,k2>0,sgn(·)为符号函数。双幂次趋近律使得系统状态远离滑模面时,幂次为v1的趋近律项起主要作用,当系统状态接近滑模面时,幂次为v2的趋近律项起主要作用。增大k1和k2也可以提高趋近滑模面的速度,但不如改变v1和v2的效果明显。
选取李雅普诺夫函数为:

对式(8)两端求导,可得:

所以滑模面S在式(7)趋近律作用下可达到滑模面S=0。
由文献[8]可知,当t→+∞时,

选取李雅普诺夫函数为:


增大k1和k2,可以减小稳态误差。文献[8]指出双幂次趋近律作用下的系统状态到达滑模面时,趋近速度减小为零,实现了光滑过渡,有效消除了抖振。但是双幂次趋近律仅仅实现了滑模面光滑过渡,并不可能消除抖振。
为了减小抖振现象,将公式(7)趋近律修改为

式中:λ1>0,λ2>0,tanh(·)为双曲正切函数。增大λ1和λ2可以减小抖振,但也将增大稳态静差。所以可根据速度稳态误差和式(12),初步选取参数λ1、λ2和幂次参数,然后根据系统抖振情况进一步确定参数λ1和λ2。
4 仿真结果分析
图1所示是感应电机矢量控制的仿真结构框图。
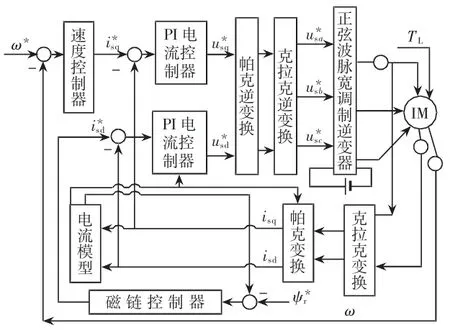
图1 感应电机矢量控制仿真结构
所采用的仿真工具是Matlab。在t=0s时加入所提出的速度控制器。
感应电机的额定功率为37.3kHP,额定电压为460V,额定频率为60Hz,其它标称值[9]如下:

传统感应电机矢量控制方案中,速度控制器和电流控制器采用比例(P)控制器或者比例积分(PI)控制器,通常采用比例积分控制器。虽然比例积分控制器具有较好的稳态精度,但其中积分项会使转速产生很大超调。所以为了验证所提出的控制方案,本部分与基于传统比例速度控制器的传统方案进行对比仿真。比例速度控制器中比例参数值选为1000,传统方案的其它参数与所提出的控制方案参数相同。仿真中控制器1是传统比例速度控制器,控制器2是所提出的快速滑模控制器。

在仿真中,速度指令信号初始值是859.4r/min。负载转矩TL初始值是0.1N·m,在2.55s时负载转矩阶跃为100N·m。转子磁链给定值为0.95Wb。
4.1 情况1
在情况1中,电机工作在标称参数。
图2所示是情况1时的转速响应及其局部放大图形,图中点线曲线是控制器1作用下的响应,实线曲线是控制器2作用下的响应。从图2可以看出,在轻载时选取足够大的比例速度控制器参数值、系统的调节时间和稳态误差都优于所提出的速度控制器。在轻载时比例速度控制器和所提出的速度控制器都完成了对转速指令的跟踪。相对于控制器1的响应,在2.55s突加负载转矩后,控制器2的动态降落和恢复时间显著减小。图3是情况1时的转矩响应及其局部放大图形。
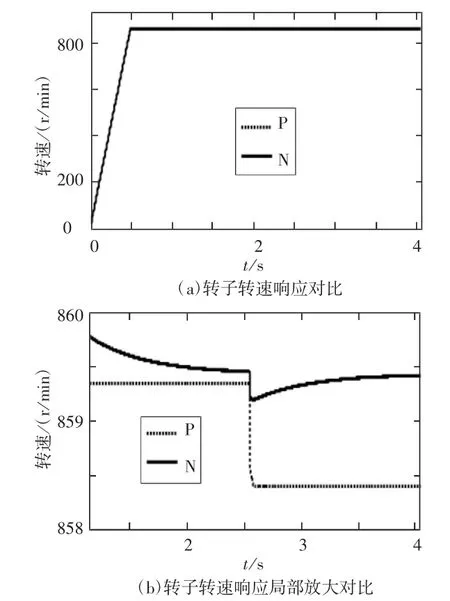
图2 情况1时的转速响应及其局部放大图形

图3 情况1时的转矩响应及其局部放大图形
由图2和图3可以看出,两个控制器转矩的响应无明显差别,都处在合理范围。
4.2 情况2
在情况2中,电机的转动惯量变为标称值的1.5倍,粘性摩擦系数变为标称值的4倍,其他电机参数保持不变。
图4所示是情况2时的转速响应及其局部放大图形,图中点线曲线是控制器1作用下的响应,实线曲线是控制器2作用下的响应。通过图2和图4可以看出,在轻载时电机的转动惯量和粘性摩擦系数的变化并没有引起所提出控制器的转速响应发生明显变化,但是控制器1的转速响应产生明显增大的稳态误差。在突加负载转矩后,所提出控制器的转速响应也不显著,控制器1转速响应的动态降落明显增大。

图4 情况2时的转速响应及其局部放大图形
图5所示是情况2时的转矩响应及其局部放大图形。从图3和图5可以看出,各个控制器作用下的转矩响应都比较合理,但在出现转矩偏差时控制器2作用下的转矩响应更迅速。
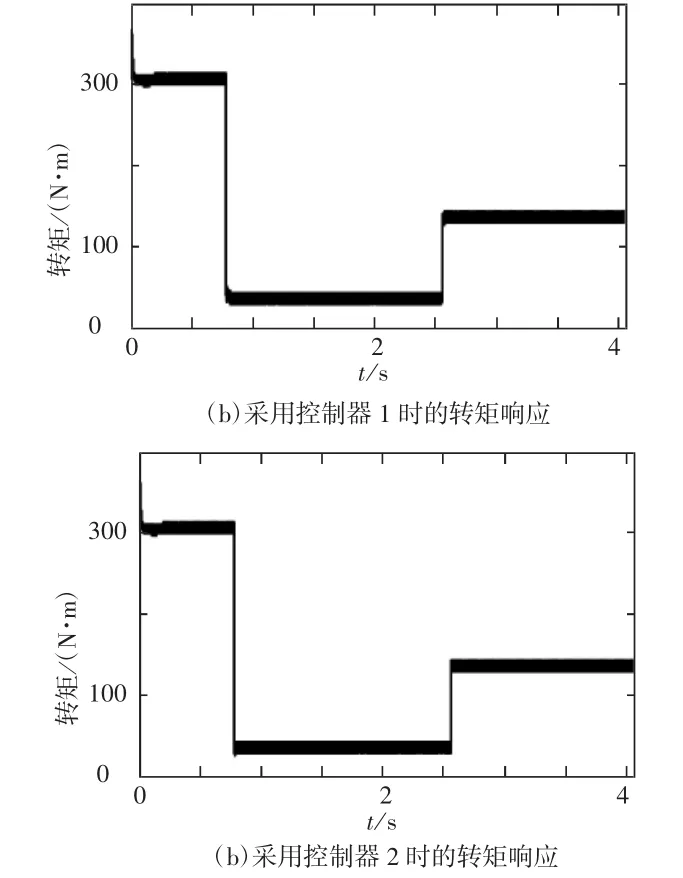
图5 情况2时的转矩响应及其局部放大图形
由图2到图5可以看出,通过基于双幂次趋近律的滑模控制器,控制器2获得了较快的转速跟随性能,抗干扰性能较好,没有明显抖振现象。
5 结束语
本文设计了感应电机矢量控制中转速控制的基于双幂次趋近律的滑模控制器。该控制器在机械参数变化和未知负载转矩时,能跟踪转子转速指令信号。采用比例积分滑模面减小转速稳态静差。通过双幂次趋近律实现快速跟随转速指令。用双曲正切函数来减小抖振现象。仿真结果表明,使用该控制器控制转速不仅获得了较快的跟踪性能和较好的抗干扰性能,同时没有明显抖振现象。
[1]杨文强,蔡旭,姜建国.矢量控制系统的积分型滑模变结构速度控制[J].上海交通大学学报,2005,39(3):426-428.
[2]Jamoussi K,Ouali M,Chrifi-Alaoui L,et al.Robust sliding mode control using adaptive switching gain for induction motors[J].International Journal of Automation and Computing,2013,10(4):303-311.
[3]高为炳,程勉,夏小华.非线性控制系统的发展[J].自动化学报,1991,17(5):513-516.
[4]梅红,王勇.快速收敛的机器人滑模变结构控制[J].信息与控制,2009,38(5):552-557.
[5]王燕,芦逸云,葛运旺.基于趋近律的力矩电机终端滑模轨迹跟踪控制[J].华中科技大学学报(自然科学版),2013,41(4):83-87.
[6]茅靖峰,吴爱华,吴国庆等.永磁同步电机幂次变速趋近律积分滑模控制[J].电气传动,2014,44(6):50-53.
[7]Gunabalan R,Subbiah V.Speed sensorless vector control of induction motor drive with PI and fuzzy controller[J].International Journal of Power Electronics and Drive Systems,2015,5(3):315-325.
[8]李慧洁,蔡远利.基于双幂次趋近律的滑模控制方法[J].控制与决策,2016,31(3):498-502.
[9]Barambones O,Alkorta P.A robust vector control for induction motor drives with an adaptive sliding-mode control law[J].Journal of the Franklin Institute,2011,348(2):300-314.
Design and simulation research of induction motor control based on double power reaching law
LU Yong-kun
(School of Electronic Information and Automation,Tianjin University of Science and Technology,Tianjin 300222,China)
In order to improve the tracking performance and robustness of a field-oriented vector control of induction motor,a method of double power reaching law-based sliding mode controller is designed for velocity control in speed loop.The proportional-integral sliding surface is adopted to reduce steady-state error of velocity control.The fast tracking performance is achieved by the double power reaching law.Hyperbolic tangent function is used to reduce the chattering.The simulation comparison with traditional proportional controller of velocity control shows that the system has good tracking performance and good robustness,and has no obvious chattering phenomenon.
vector control of induction motor;velocity control;sliding mode control;double power reaching law
TM921.5
A
1005—7277(2016)03—0009—04
路永坤(1976-),男,博士,讲师,研究方向为电气自动化、滑模控制等。
2016-05-24
