液力变矩型同步风力发电机低电压穿越性能分析
2016-09-02王军伟
王军伟
(兰州电机股份有限公司,甘肃兰州730050)
液力变矩型同步风力发电机低电压穿越性能分析
王军伟
(兰州电机股份有限公司,甘肃兰州730050)
液力变矩型同步风力发电机组是国内近期投运的一种新机型,它的核心技术是应用WinDrive液力变矩器进行变矩调速,实现风机可变输入转速的恒速输出,为发电机同步并网提供稳定的输入转速。同步发电机的励磁系统配套自动电压调节器进行励磁控制,有效地解决了传统风机低电压穿越能力差、无功输出能力不足的问题。针对2.0MW液力变矩型同步风力发电机的运行特点,研究其工作原理及控制策略,建立机组主要组件的数学模型,结合实际参数进行模拟仿真,分析了电网短路故障时机组低电压穿越的动态响应能力。
液力变矩;同步并网;低电压穿越;仿真分析
1 引言
风力发电的动力来自于风能,风能的随风波动会造成风电机组输送至电网的电能很不稳定,发电出力时大时小,风电规模越大这种现象越突出。随着风电在电力系统中所占比例的增大,风电机组的电网适应性对电网稳定运行显得尤为重要,这就需要风机具备较强的调控能力。国内曾经发生过电网故障引起电压跌落,成批风机相继脱网,造成电力网溃网解列的事故。因此,国家标准GB/T 19963-2011规定风电机组必须满足电网适应性要求,各类机型必须通过性能测试,达到技术要求后方可准予入网。
液力变矩型同步风力发电机组就是旨在解决风电机组满足电网适应性要求的问题而开发的一种新机型,基本原理是利用WinDrive液力变距器进行前端调速,保证后端输入转速恒定,使发电机实现同步并网。发电机采用电励磁无刷同步发电机,励磁系统通过自动电压调节器进行控制,使发电机的无功输出能力有了很大提高。尤其在电网发生短路故障时,通过励磁强励可以保持发电机电压稳定,为电网提供足够的无功支撑。为了更好掌握该机型的运行原理,通过揭示机组的结构组成,研究其控制原理及策略,建立相应的数学模型进行仿真分析,验证了机组动态响应特性的准确性和可靠性,评估了机组的低电压穿越能力,为机型进一步推广提供理论依据。
2 液力变矩型同步风力发电机组的基本原理
2.1 风机的基本组成
液力变矩型同步风力发电机组由风轮变桨系统、主齿轮箱、WinDrive、三相无刷电励磁同步发电机4大部分组成。机组结构如图1所示。

图1 机组结构示意图
2.2 风机的基本原理
风机实现变速恒频的核心部件是WinDrive液力变矩器,它由差速行星轮系、定轴轮系和可调式变矩器3级组成。WinDrive结构如图2所示。
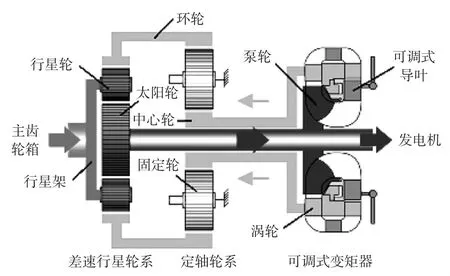
图2 WinDrive结构示意图
风轮功率经主齿轮箱增速输入给WinDrive行星架,行星轮再传递给太阳轮后功率被分成2部分,大部分功率通过太阳轮主轴输出给同步发电机,由发电机转化成电能输送至电网中;小部分功率分流给同轴连接的泵轮,泵轮旋转带动变矩器液压工作油循环流动,产生的动力驱动涡轮旋转,涡轮与定轴轮系的中心轮连接,转矩经定轴轮系减速后反馈给环轮。差速行星轮系的行星轮固定在旋转的行星架上,它同时接收风轮及环轮两方面的传输功率。因此,变矩器输出转矩与风轮输入转矩在行星轮得到叠加,通过调节变矩器可调式导叶开度改变工作油流量,控制涡轮的转矩及转速来恒定太阳轮的转速,从而保证了同步发电机的输出转速恒定。
2.3 发电机的励磁控制
液力变矩型同步风力发电机组励磁系统采用无刷励磁方式,励磁系统主要由永磁发电机、交流励磁机、旋转整流模块和自动电压调节器AVR组成。永磁发电机为AVR提供交流电源,电源经过PWM整流输出给交流励磁机励磁绕组,交流励磁机的定子电流经过全波整流为发电机提供励磁电流。AVR是同步发电机的电压控制单元,根据设定电压/无功控制目标值,调节励磁机的励磁电流大小,控制发电机的电压及无功输出。励磁系统如图3所示[1]。
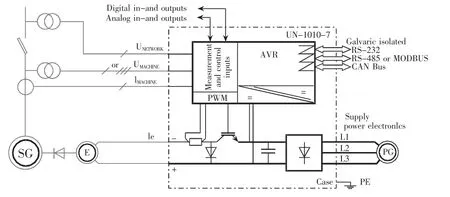
图3 发电机的励磁系统
自动电压调节器AVR有2种控制模式,电压控制模式和功率因数控制模式。风机启动并网前期,AVR工作在电压控制模式下,通过检测网侧及发电机电压及频率,基于内部模型控制算法,控制励磁电流大小,使发电机电压始终跟随网侧电压。同时,将频率差值Fbias发送给液力变矩器控制器WCU进行转速控制,当发电机转速达到同步转速时,AVR同步检测单元检测同步满足条件,发出并网指令同步并网。并网成功后AVR自动转入功率因数控制模式,通过采样发电机电压及电流,计算有功、无功功率及功率因数,实测功率因数值与控制目标值进行比较,控制发电机励磁大小进行无功出力调节;实际功率PGen同时上传至风机控制系统WEC及液力变矩器控制器WCU,WCU根据设定功率-转速曲线(WinDrive输入转速)调整变矩器转矩,使风机的有功功率达到对应转速点的预期目标值。当电网发生短路故障时AVR启动Boost强励模式,AVR根据机组并网点电压跌落情况,进行励磁强励提高风机无功输出维持电网无功支撑。
3 机组的稳态特性
3.1 机组的转速特性
首先,风轮转化的机械能经主齿轮箱增速传递给液力变矩器,风轮转速ωW与液力变矩器输入转速即行星架转速ωC1满足如下关系:

式中:主齿轮箱传动比iW≈28.44。
根据相对原理,液力变矩器输入级行星轮系太阳轮转速ωS1、行星架转速ωC1和环轮转速ωR三者满足如下关系[2]:

式中:传动比iRS1=-ZR1/ZS1≈-2.16;ZR1、ZS1为环轮、太阳轮齿数。
因此,由式(2)可以导出如下关系式:

同理,定轴轮系转速关系与式(2)相似,只是行星轮为固定轮,行星架转速ωC2=0,变矩器涡轮与中心轮同轴连接,涡轮转速ωT等于中心轮转速ωS2,环轮与行星轮系环轮为整体筒式结构,两个环轮转速相同但齿数不同,由此得出如下关系:

太阳轮输出轴与发电机、变矩器泵轮同轴连接,所以ωG=ωB=ωS1,由式(1)、式(3)、式(4)导出发电机转速ωG满足如下关系:

液力变矩器两级轮系的传动比iRS1、iRS2由其齿数决定,为常数,令k=(1-iRS1)iW、b=iRS1/iRS2,则发电机转速关系式变为[3]:

由式(6)关系可以看出,风轮转速变化时,如要保持发电机转速不变,只有调节液力变矩器的导叶开度改变涡轮转速。
3.2 机组能量传递的转矩特性
根据贝兹理论,风轮吸收转化功率满足如下关系:
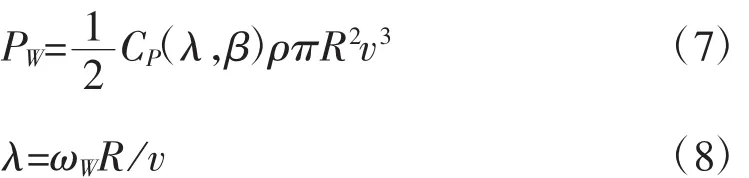
利用数值近似计算法,得出CP的计算公式如下[4]:
由于旋转机械功率与转矩满足P=MW关系,可以得出风轮转矩Mω关系为:

风轮功率经主齿轮箱增速,输入给液力变矩器行星架。考虑主齿轮箱传递效率系数ηW,行星架输入转矩MW可按下式计算:

在液力变矩器行星轮系中,根据能量守恒定律,为了分析方便暂不考虑齿轮传递损失,行星架转矩MC1、环轮转矩MR及太阳轮转矩MS1之间满足如下平衡关系:

变矩器涡轮输出转矩由定轴轮系传递至环轮,同样暂不考虑齿轮传递损失,涡轮转矩MT与环轮转矩MR之间满足如下关系式:

太阳轮输出轴上,输出转矩MO与太阳轮转矩MS1之间满足如下关系:

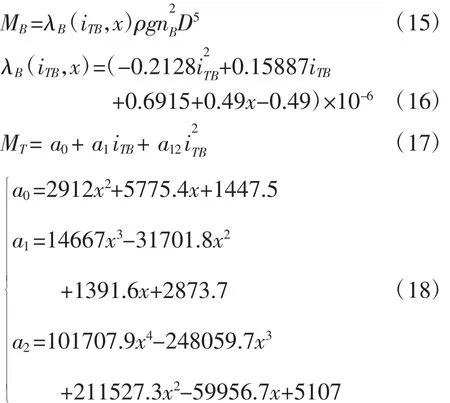
变矩器泵轮转矩MB、涡轮转矩MT由下式计算[5]:式中:λB(iTB,x)为泵轮力矩系数;P为工作油密度,取826kg/m3;D为循环圆直径,取700mm;iTB为泵轮与涡轮转速比,iTB=ωT/ωB;nB为变矩器泵轮转速,rpm/min;x为变矩器导叶相对开度。
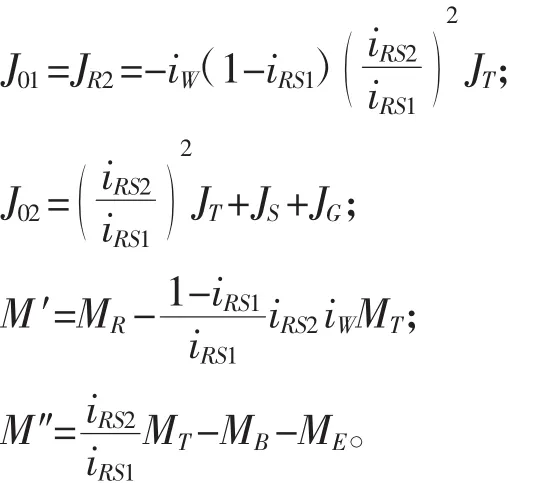
由式(12)~式(14)整理可得液力变矩器输入、输出转矩平衡方程式:

考虑WinDrive齿轮传递损失及各种摩擦损失,计入液力变矩器传递效率ηPS后,液力变矩器输出转矩为:

因为MG=MO,由式(5)及式(20)导出发电机输入转矩为:

4 机组的动态特性
液力变矩型同步风力发电机组的动态特性会影响机组受到扰动时能否稳定运行,为了分析它的动态性能,需要建立风力机、WinDrive液力变距器和同步风力发电机的动态模型。
4.1 传动系统的数学模型
机组传动链按多质量块弹簧阻尼系统等效考虑,由于风轮及低速轴转动惯量远大于主齿轮箱,为了计算方便可以忽略主齿轮箱的转动惯量,风轮与主齿轮箱的动态特性可以整体描述[6]。在传动链低速轴上,得到的动态平衡方程为:

式中:M1为风轮输出转矩,N·m;JW为风轮与低速轴转动惯量总和,kg·m2;DW为低速轴阻尼系数。
风轮输出转矩经主齿轮箱升速后传递给液力变矩器,因此,可以由行星架输入转矩推算出:

太阳轮输出轴及变矩器涡轮输出轴的动态方程为:

式中:MS2为涡轮轴输出转矩,N·m;JS为太阳轮输出轴转动惯量,kg·m2;JT为涡轮输出轴转动惯量,kg·m2。
由于太阳轮、环轮、行星架的转矩满足如下比例关系[3]:

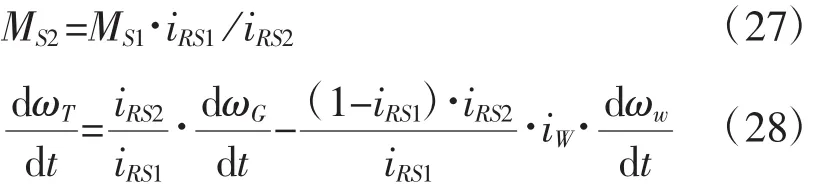
因此,由MR1=MR2,联立式(25)、式(26)可以得出涡轮输出轴转矩MS2为:
液力变矩器输出转矩传递给同步发电机,发电机转子的动态转矩平衡方程式为:

式中:ME为同步发电机电磁转矩,N·m;JG为同步发电机转动惯量,kg·m2;DG为同步发电机阻尼系数。
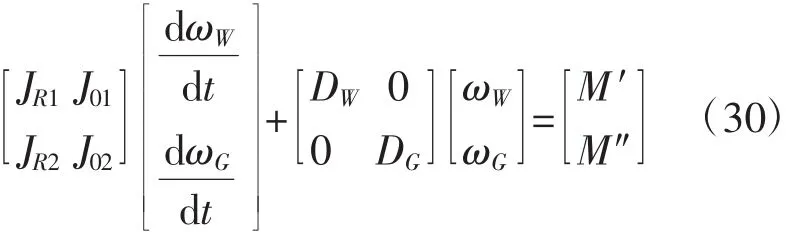
由式(22)-式(29)得出传动系统的动态数学模型如下:
4.2 发电机的数学模型
4.2.1 发电机的数学模型
对于凸极同步发电机,由于q轴气隙比较大,通常忽略交轴磁链暂态过程,只计录阻尼绕组D、Q以及励磁绕组f的电磁暂态和转子机械动态,适宜用五阶实用模型描述[7]。同步发电机基本参数如表1所示。
d轴电气方程为:
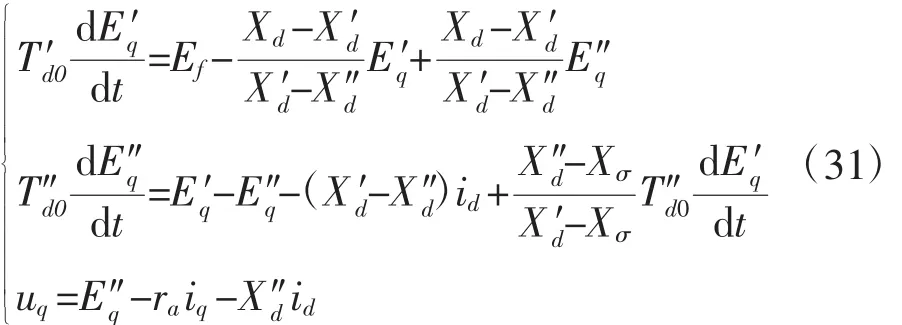
q轴电气方程为:
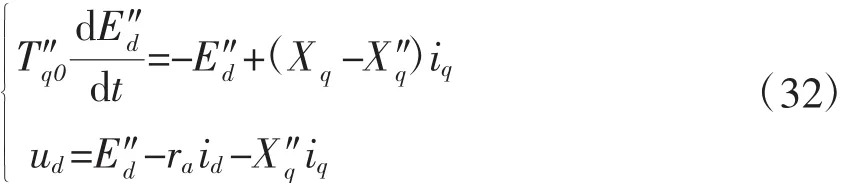
转子运动方程为:

电磁转矩方程为:


表1 同步发电机基本参数表
4.2.2 励磁系统的数学模型
同步发电机的励磁模式为交流励磁机旋转整流励磁方式,电压调节器AVR采用Unitrol-1010电压调节器,调节器的控制方式采用电压控制模式和功率因数控制模式。其控制模型适宜选用IEEE类型AC7B[8],控制策略如图4所示。
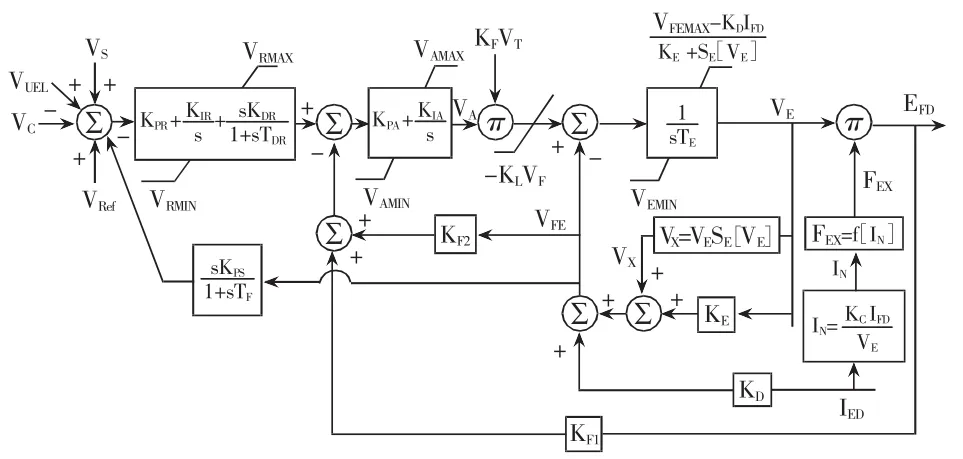
图4 励磁系统控制模型
其中:EFD、IFD分别为发电机励磁电压、励磁电流;VT、IT分别为发电机电压、电流;VS为PSS环节反馈量;VFE为与交流励磁机励磁电流成正比的电压反馈量;KE、KD、SE分别交流励磁机的励磁系数、电枢反应系数、饱和系数;TE为交流励磁机励磁绕组开路时间常数。
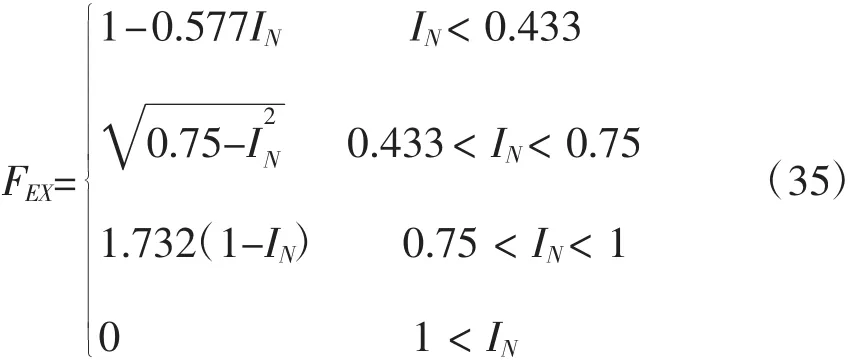
控制模型中,交流励磁机的磁路饱和效应用S[VE]函数进行补偿,S[VE]可以通过绘制励磁机空载曲线求取,文献[7]中已介绍详细方法。整流电路交流励磁源由于存在感性内阻,负载电流的增加会引起换相压降增大,使整流输出电压线性变差,这部分影响用函数FEX=f[IN]进行修正,三相全波整流时励磁电流随IN变化关系式如下:
5 风机的低电压穿越能力
5.1 低电压穿越的控制策略
对于液力变矩同步风力发电机组而言,与低电压穿越有关的部件,按功能主要分为同步发电机系统、WinDrive液力变矩器和风轮变桨系统3部分。直接并网型同步发电机在电网发生短路故障期间,电网电压跌落会引起发电机电压下降,受其影响发电机的电磁转矩减小,转矩平衡关系破坏,转子加速功角增大。这时,需要风机控制系统及时减小原动力转矩,恢复转矩平衡,这就要求风机控制系统要有相应的控制措施和快速地响应能力。
发生故障时,发电机的保护装置MFR300检测到电压跌落,检测值达到低电压穿越启动门槛值、且跌落深度在低电压穿越设定范围内时,发出LVRT信号。风机控制系统接到信号后,启动低穿程序,运行模式转入“LVRT”模式,以后每4ms读取一次MFR300检测信号,判别故障是否恢复。如果故障还在持续,风机控制器将指令发送给WinDrive控制器WCU和风轮变桨系统,WCU启动“TVS”低穿模式,迅速关闭变距器可调式导叶,使发电机输入转矩减至最小,一般响应时间为20ms;同时,风轮变桨系统减小桨叶开度,降低前端驱动链的输入转矩,使液力变距器聚集的能量得以释放。发电机励磁调节器AVR检测到机端电压跌落,启动Boost模式进行强励,增大励磁电流,阻止发电机电压继续下跌,并为电网输送大量无功,来维持系统稳定。若短路故障在低穿设定范围内消除,风机恢复正常控制模式,系统全面恢复正常发电。如果电网电压跌落深度或跌落时限超出设定范围,风机控制系统启动“快速停机”模式,AVR发指令解列发电机,变桨系统紧急收桨停机,使风机退出运行。
5.2 低电压穿越仿真
5.2.1 仿真模型
为了精确模拟机组的低电压穿越,应用DIgSILENT/PowerFactory软件进行仿真,模型按功能进行封装,主要包括同步发电机(Generator)、励磁调节器AVR(VCO)、传动链(Shaft/Gearbox)、WinDrive控制器(WinDrive Ctrl)、气动部件(Turbine)、桨叶控制(Pitch Adjust和Pitch Control)及保护模块。
发电机模型采用DIgSILENT/PowerFactory软件自带的标准5阶同步发电机模型,该模型是基于IEEE标准电力系统仿真模型构建的,包括磁饱和曲线等基本参数表;励磁电压调节器和励磁系统模型参考产品说明[1],根据电力系统稳定性的分析,需要适当简化,基于IEEE标准搭建励磁模型结构AC7B;传动链模型采用三质量弹簧阻尼结构搭建,包括风力机、WinDrive和发电机;WinDrive控制器模块主要包括旋转齿轮模块和转矩控制模块2部分,旋转齿轮模块包含系统运动学和动力学传递函数,转矩控制模块通过非线性特征曲线和简化传递函数进行模拟;气动部件模型包括扫掠面积、空气密度和气动特性等,叶片采用一阶等式进行简化模拟;由于变桨系统对于风电机组故障响应的影响较弱,对桨叶系统模型进行减阶简化建模,只反映风电机组在故障穿越过程中的基本桨叶控制特性。保护模块基于风电机组实际保护策略,主要包括频率保护、电压保护、电流保护、有功保护以及低电压穿越检测环节等。风机机械和控制模块的模型结构如图5所示。
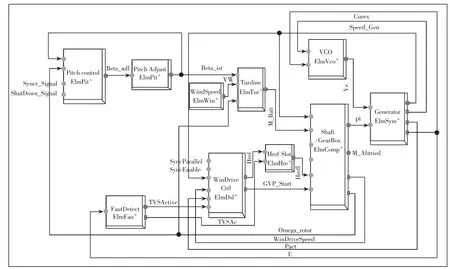
图5 机组机械和控制模块的模型结构图
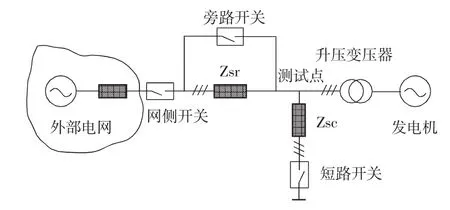
图6 低电压穿越模拟电网模型结构图
电网系统模型采用等值外部电网模型与详细电压跌落发生装置模型串联模式,等值外部电网模型由恒定交流电源与电网等效阻抗串联组成。详细电压跌落发生装置模型基于装置基本原理拓扑结构搭建,电压跌落发生装置由限流电抗器Zsr和短路电抗器Zsc组成T型电路,并串接在升压变压器高压侧。限流电抗器Zsr的功能是限制故障模拟对电网的影响,而短路电抗器Zsc则是模拟电网故障。因此在模拟电网故障进行低电压穿越测试时,首先将旁路开关断开,使限流电抗器Zsr串入电网中,然后通过控制短路开关的闭合和断开来制造电网故障。通过选择三相短路开关的短路相数以及发生装置电抗器和网侧等效阻抗的不同组合,可以模拟不同故障类型和故障电压跌落深度。电网模块包括含电网等效阻抗的恒定交流电源、限流电抗器、旁路开关、短路电抗器和短路开关等,如图6所示。
5.2.2 仿真结果
对机组的低电压穿越性能进行仿真,分析电网三相对称短路和两相不对称短路两种故障类型的动态响应特性。每种情况按功率,在标称功率0.1Pn≤P≤0.3Pn和P>0.9Pn范围内,电网电压跌至标称值的90%、75%、50%、35%、20%分别进行仿真。提供故障情况最为恶劣的,电压跌至20%标称电压、满载功率时的仿真情况,波形如图7、图8所示。波形图按从左到右、从上到下的顺序依次为故障跌落点(风电机组升压变高压侧)三相电压,升压变低压侧正序电压,发电机正序有功、无功电流,发电机有功、无功功率,同步发电机转速和机械转矩。
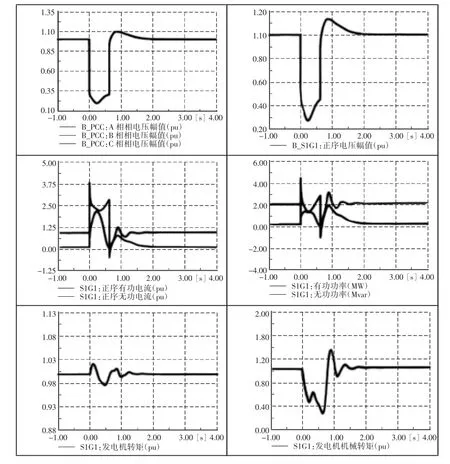
图7 20%Un三相故障Pn=2000kW仿真波形图
仿真结果表明,当电压跌落至20%Un、发电机功率P=2000kW、三相短路故障时,短路瞬间无功电流冲击峰值达到3.75p.u,电压跌落期间持续在2.5p.u波动,最小无功电流2.2p.u,自短路时刻计时开始约250ms,定子有功电流冲击最大峰值接近2.0p.u。短路初始电压跌落引起电磁转矩急剧下降,机械转矩失去平衡,发电机转子加速。调节风机系统,在0ms-200ms时间范围内,发电机输入机械转矩由故障前的实际值减小至0.5倍的标称转矩,有功功率降至1.0MW,转速震荡回落至同步转速点附近。在系统故障消除电压恢复后,同步发电机重新牵入同步,风机控制系统切入正常模式,调节输入机械转矩,使其逐渐地恢复至故障前实际出力,2s后系统趋于正常。两相短路故障情况与三相短路故障相似,所不同的是两相短路故障时,非故障相电压跌落幅值较小,有功功率和机械输入转矩震荡幅值相对较小,短路瞬时无功电流幅值接近1.2p.u.,无功功率最小值大于1.2MVar、最大峰值为2.8MVar。
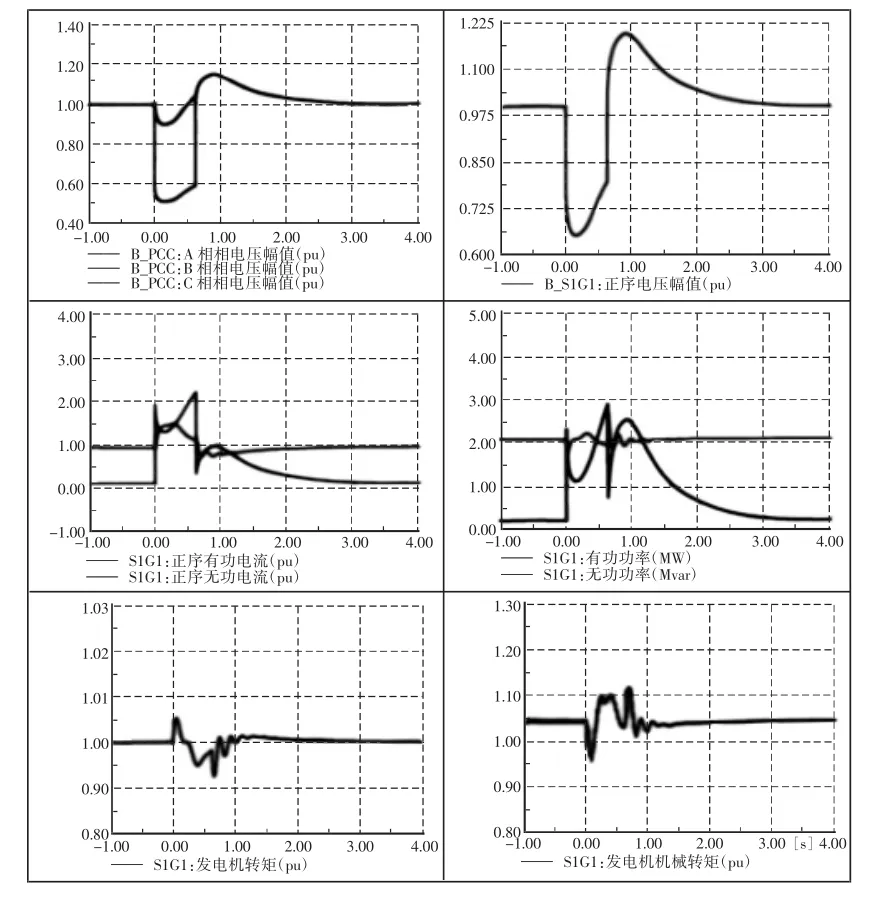
图8 20%Un两相故障Pn=2000kW仿真波形图
6 结束语
仿真结果证明,该型号机组满足国家标准GB/ T 19963-2011《风电场接入电力系统技术规定》对低电压穿越能力要求,故障期间机组不脱网可以连续运行,自电压恢复时刻开始,有功功率至少以10%额定功率/秒的变化率恢复至实际风况对应出力值。动态无功电流支撑的响应时间不大于75ms,持续时间不少于550ms。目前,液力变矩同步风力发电机机型已经投入使用,根据装机容量49.5MW的甘肃民勤某风场运行情况来看,现场实际检测性能符合技术要求,运行稳定。机组在无功输出及电能质量方面性能具有很大的优势,无需配置无功补偿设备,就能够为电网输送无功出力。
[1]ABB.UNITROL® 1020 User Manual Automatic Voltage Regulator[Z].Switzerland:ABB SwitzerlandLtd,2011.
[2]洪孟仁,汪信远.机械原理及机械零件[M].北京:同济大学出版社,1990:296.
[3]周绪强.液力变速与传动技术在风力发电系统中的应用研究[D].哈尔滨:哈尔滨工业大学,2009.
[4]张琦玮,蔡旭.最大风能捕获风力发电系统及其仿真[J].电机与控制应用,2007,34(5):42-46.
[5]杜魏魏.风力发电可变导叶液力机械调速装置研究[D].长春:吉林大学,2011.
[6]马文星,刘彬,刘宝春,刘浩.风力发电调速系统及其控制[J].吉林大学学报,2013,43(5):1276-1283.
[7]鞠平.电力系统建模理论与方法[M].北京:科学出版社,2010:131-138.
[8]IEEE Std 421.5TM-2005,IEEE Recommended Practice for Excitation System Models for Power System Stability Studies[S].2006.
Research on the low-voltage ride-through capability of wind synchronous generator with hydro-dynamically controlled gearbox
WANG Jun-wei
(Lanzhou Electric Corporation,Lanzhou 730050,China)
The wind synchronous generator with hydro-dynamically controlled gearbox is a new type of machine applied to wind turbine in China in recent years,and the heart of its technology is to apply WinDrive variable-speed hydraulic torque converter for the purpose of speed adjustment.It can convert the variable input speed into the constant speed output,and can provide a stable input speed for generator synchronous grid connection.Especially,the synchronous generator works together with AVR and has well excitation control function,and it effectively solves the problems that the low voltage ride through capability of the traditional turbine is poor and the reactive power output capability is insufficient.Based on the operation characteristics of 2.0MW wind synchronous generator with hydro-dynamically controlled gearbox by studying its working principles and control strategies,the mathematical model of the main components of the unit is established,the simulation experiments combined with the actual parameters are presented,and the low-voltage ride-through dynamic-response capability of the system at the very moment of grid short-circuit fault is also studied.
hydraulic torque converter;synchronous grid connection;low-voltage ride through;simulation analysis
TM315
A
1005—7277(2016)03—0001—08

2016-05-04
王军伟(1970-),男,高级工程师,长期从事电机与控制的理论研究,电机、风电机组试验和电气安装调试的实践工作。
