运动噪声对相参积累影响的研究
2016-08-31周成义中国电子科技集团公司电子科学研究院北京100041
周成义(中国电子科技集团公司电子科学研究院,北京,100041)
运动噪声对相参积累影响的研究
周成义
(中国电子科技集团公司电子科学研究院,北京,100041)
即使已知目标的运动信息,无处不在的运动噪声仍会导致对运动目标回波进行相参积累时,无法获得信噪比的持续提高。本文利用加速度噪声模型下的匀速直线运动的运动方程,对运动噪声对相参积累获取增益的影响进行了分析,给出了该模型下的相参积累时间上限。
相参积累;运动噪声;时间上限
0 引言
噪声在自然界中无处不在,目标的运动同样存在运动噪声,例如理想状态下作匀速直线运动的飞机,速度为,且恒定不变,但在真实飞行中由于空气的扰动、发动机推力扰动等因素,其运动速度并非恒定不变,而是在速度与速度噪声的共同作用下,作接近恒定的速度的匀速直线运动,只是速度噪声相对速度很小,机上的乘客或飞行员几乎感觉不到。
预警雷达在进行运动目标检测或者SAR对目标进行成像处理时,通常使用相参积累的方式提高回波信噪比,过程中若已知目标的运动参数,则可大大增大回波信号的相参性,提高相参积累增益,但由于无处不在的运动噪声,导致即使已知目标的运动参数,对目标回波信号进行相参积累时,积累增益也无法得到无限制的提高,运动噪声的存在导致在已知运动参数的情况下,相参积累仍然积累时间上限。本文即以匀速直线运动为例,对运动噪声对相参积累获取增益的影响进行分析,发现由于运动噪声的存在,即使完全已知目标的运动参数,相参积累也存在积累时间上限,具体分析如下。
1 理论分析
1.1非运动噪声模型下的相参积累


信号经目标反射后的回波信号为

假设已知目标的运动参数,则经过下变频,并通过已知的运动参数对回波信号进行距离走动对齐后信号为:




可见,在无运动噪声存在的情况下,通过已知的目标运动参数完成匹配滤波实现相参积累后的信噪比与积累脉冲数成正比,积累脉冲数越多积累后的信噪比越高,相参积累没有上限。
1.2运动噪声情况下的相参积累
目标虽做匀速直线运动,但运动噪声的存在致使目标运动方程不再为2-1,文献[1]、[2]提到的机动加速度模型认为目标的运动噪声以加速度的形式存在,且服从高斯白噪声分布,设其为,均值为0,方差为。则运动噪声下目标的运动方程应为

则回波时延为

由于加速度噪声对回波距离走动影响很小,分析时忽略其对距离走动影响,则经过下变频、距离走动对齐以及多普勒滤波后信号为:

上式求和号后的部分会影响匹配滤波后信号幅度,进而影响信号功率,从而影响积累的信噪比。由于该项为随机过程,针对其采用数学期望进行分析。由于为0均值,方差为的高斯噪声,其概率密度函数为

则求和项数学期望值为

积累后的信噪比的数学期望为
对上式中求和项部分进行泰勒展开,并忽略三阶及以上高阶项影响,上式可简化为

对应的积累时间长度为

可见,对于最简单的匀速直线运动目标,即使已知目标的运动参数,由于运动噪声的存在,相参积累得益并不能无限制提高,而是存在一个时间上限,该上限与载波波长的平方根成正比,与目标加速度噪声方差的平方根成反比。
2 实验与仿真对比
受限于实验条件,本文通过小型雷达样机仅能对起飞不久仍处于加速状态的民航机进行探测,利用已知的运动信息完成加速度补偿后,人为调整为匀速直线运动后进行相参积累。其中系统载频为3.2G,重频为10K,完成50个脉冲的PD处理后的信噪比图如图3-1所示,积累信噪比与积累脉冲数关系实验结果如表3-1所示。
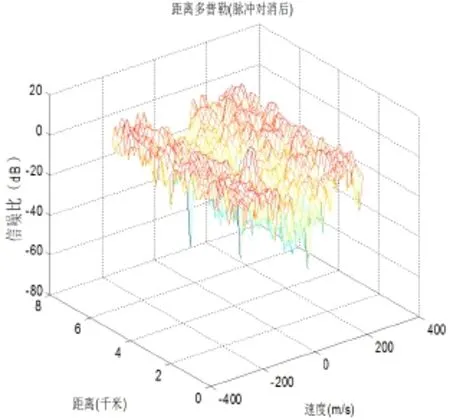
图3-1 50个脉冲PD处理后信噪比图
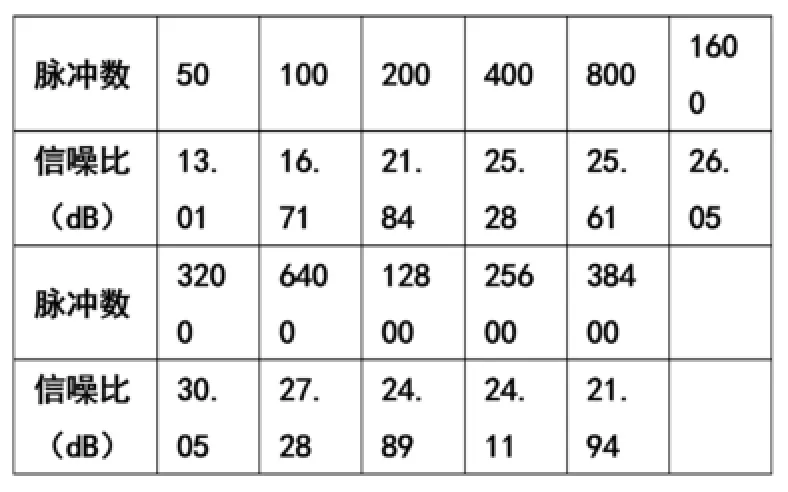
表3-1 信噪比与积累脉冲数实测值
从图3-2可看出,运动噪声模型仿真结果与真实的实验结果吻和良好,且根据该模型可得出此时最大积累脉冲数为约为3750个,积累时间上限约375ms。倘若此时目标处于巡航阶段,其运动噪声方差更小,其积累时间也更长。
3 结论
从上述讨论中可以得出,对于匀速直线运动,即使已知目标
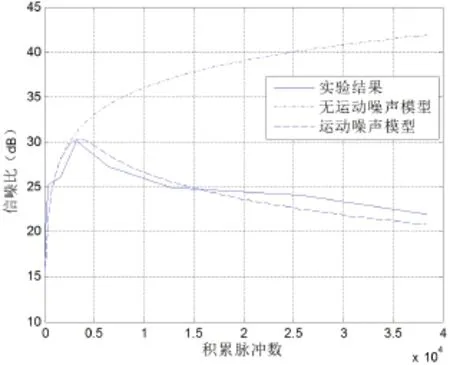
图3-2 实验结果与运动噪声模型仿真对比图
运动信息,由于运动噪声的存在,相参积累得益不可能无限制的提高,而是存在一个时间上限 ,积累时间长度超过该上限后,其积累增益反而会随着积累时间的延长而下降。延长相参积累时间的方法一是使用波长更长的信号,二是增加平台空间稳定性,尽量减少引入的平台与目标间的运动噪声。
同理,SAR系统在成像处理时同样需要相参积累处理,不同的是目标静止,平台运动,平台的运动同样存在运动噪声,即使平台自身运动参数已知,由于噪声的存在其相参积累也必然存在积累时间上限,该上限与与本节所得的结论相同。
[1] 周宇仁 机动目标“当前”统计模型与自适应跟踪算法[J].航空学报 1983.73-85;
[2] 张园.空中单机动目标跟踪算法的研究[D].大连海事大学.2014
[3] 段战胜,韩崇昭,党宏社.最大加速度未知的“当前”统计模型机动目标跟踪[J].计算机工程与应用.2003.19-22
[4] 夏卓卿,陆军,陈伟健.一种Chirp雷达包络对齐新方法[J].雷达科学与技术.2010
[5] Mark A. Richards 著,邢孟道,王彤,李真芳译.雷达信号处理基础[M],北京:电子工业出版社,2008
[6] 丁鹭飞,耿富录.雷达原理(第三版).西安:西安电子科技大学出版社[M],2002;
Study on the effect of noise on motion coherent integration
Zhou Chengyi
(China Electronic Technology Group Corporation Electronic Science Research Institute)
Even if the motion information of the target is known,ubiquitous motion noise will lead to the echo of a moving target is coherent accumulation time,unable to obtain continuous improvement in signal-tonoise ratio.In this paper,on motion noise of coherent accumulation gain gain is analyzed using the motion equation of the acceleration noise model of uniform motion in a straight line,gives the model of coherent accumulation time limit.
coherent motion;noise;time limit
